基于场景的自动驾驶汽车测试评价相关术语
场景scenario:场景是自动驾驶汽车与其行驶环境各组成要素在一段时间内的总体动态描述,这些要素组成由所期望检验的自动驾驶汽车的功能决定,即场景可认为是自动驾驶汽车行驶场合与驾驶情景的有机组合。或者说:场景描述了测试车辆与其所处环境之间的相对关系,是一段连续的事件序列。
功能场景functional scenario:通过抽象的自然语言描述的场景。德国PEGASUS项目定义了功能-逻辑-具体的场景分层体系。
逻辑场景logical scenario:根据技术开发和测试用例生成的需要,用物理状态下的参数空间来描述的场景。
具体场景concrete scenario:用逻辑场景参数空间中选取的具体参数来描述的场景。
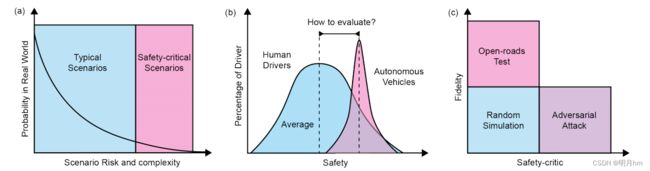
典型场景:典型的测试场景,用于常规的功能测试,但是包含了大量低风险场景,测试成本高,但是覆盖度高。
常用的功能场景有:跟驰场景、切入场景和换道场景等。
跟驰场景:主车跟驰交通车行驶,交通车能够通过突然加减速干扰主车。
切入场景:主车沿路行驶,交通车按照规定路径从相邻车道切入实施干扰。
换道场景:主车换道过程中,前面交通车会加速,后面交通车会加速实施干扰。
长尾效应:在自动驾驶测试的过程中,具有较高测试价值的边界场景出现的概率较低。
边界场景:以扩大高风险场景比例为目的,实现对典型场景的补充,可以有效提高测试覆盖率,一般用于自动驾驶汽车功能边界的测试。
加速测试:遍历海量测试场景需要强大的计算资源、耗费大量测试时间。以较小的算力成本实现全面加速测试可以平衡测试成本和测试效率。具体方法可包括资源并行加速、边界场景生成等等。
ODD(设计运行范围operational design domain):自动驾驶系统被设计的起作用的条件及适用范围,确保系统的能力在安全环境之中。
DDT(动态驾驶任务dynamic driving task):自动驾驶车辆在道路上行驶所需的实时操作功能,例如变换车道和跟随行驶功能,不包括行程安排、目的地和途径地的选择等功能。
ICS(不可避免碰撞状态inevitable collision state):表示无法避免碰撞的场景。
TTC(预期碰撞时间time To collision):测试车辆与目标车辆之间的相对速度不变的情况下,两车发生碰撞的时间。
THW(车间时距time headway):测试车辆到达目标车辆当前位置所需要的时间。
TTI(交汇时间time to intersection):测试车辆与其它交通参与者轨迹线存在交汇时,测试车辆或其它交通参与者从当前位置到达轨迹线交叉点所需要的时间。
MiL(模型在环测试Model-in-Loop):验证控制算法模型是否满足功能需求。
SiL(软件在环测试Software-in-Loop):验证生成的代码是否满足要求。
HiL(硬件在环测试Hardware-in-Loop):在闭环硬件上进行算法验证。
ViL(车辆在环测试Vehicle-in-Loop):在整车平台上进行算法验证。
CT(组合测试Combinatiorial Test):将被测系统的输入变量进行组合,以生成一组测试用例。
HDV(人工驾驶车辆Human-Driven Vehicle):场景中的车辆设置为人工驾驶模式。
IDM(智能驾驶人模型Intelligent Driver Model):常用来模拟HDV。
场景要素的重要度指数:是加速测试中的概念,用于表征场景要素对测试需求的重要度,其反映了场景要素对待测系统功能的影响程度,重要度指数越高,表明在该要素作用下待测系统功能越容易产生不良效应。