我感觉D435i的使用有必要写出一篇教程,什么烧写升级固件,更改分辨率帧率,标定,发布IMU数据等等
我感觉D435i的使用有必要写出一篇教程,什么烧写升级固件,更改分辨率,标定,发布IMU数据等等
如何查看D435i的内部参数。
可以说把D435i弄熟弄烂了,再跑起SLAM要轻松得多。
大部分SLAM给了现成的代码,只需要发布它要订阅的图像话题和IMU话题,然后同时做好标定这块,有标定参数,然后SLAM这块代码跑起来自然发布位置话题我们直接用就可以了,这样都不需要怎么看其代码,单纯用起来的话。vins和MSCKF都是这样,当然vins不厚道,没有给出最好的参数。
可以说D435i涉及到的操作比较多,我感觉应该需要有这方面的一个系列教程,不知道官方有没有。
要D435i发布IMU话题要修改launch文件这个我已经多次遇到了,之前弄vins,到现在弄MSCKF,都有。
https://blog.csdn.net/sinat_16643223/article/details/118864094

发布IMU话题也看看这篇博客(主要也是看这篇,其他的似乎都是参考这篇的)
https://blog.csdn.net/sinat_16643223/article/details/115312956

下面的总结也是截取自: https://blog.csdn.net/sinat_16643223/article/details/115312956
为了发布IMU话题,然后还和相机时间同步,对rs_camera.launch修改的地方有两处


改了之后再运行 下面命令启动即可,可以看到可以看到发布的topic变成了"/camera/imu"
没修改之前 realsense d435i在ROS中发布的IMU数据分成了两个:
“/camera/gyro/sample” 发布角速度
“/camera/accel/sample” 发布线加速度
roslaunch realsense2_camera rs_camera.launch rs-sensor-control
https://blog.csdn.net/sinat_16643223/article/details/118996369

这里告知T265的相机内参可以这么获得,不知道D435i的是不是这个命令也是的?
https://mp.weixin.qq.com/s/U4gY7l-YV3sp8-thJrIlUg
https://blog.csdn.net/sinat_16643223/article/details/119278857

这里也是这么说的,也是用这个命令,我还找到了可以通过realsense-viewer直接获取。
https://blog.csdn.net/sinat_16643223/article/details/119656475

https://github.com/IntelRealSense/realsense-ros/issues/1580
这里提供了这种方式查看D435i相机内参
https://blog.csdn.net/qq_36170626/article/details/102998942

更改分辨率

这里有视频演示怎么修改435i分辨率和帧数。
https://v.youku.com/v_show/id_XNDk5MTA4MzQwOA==.html
升级D435i的固件版本在realsense-viewer里面升级,这里也可以查看固件版本,也可以用rs-sensor-control查看D435i的固件版本(而且会显示推荐的版本),然后我们再去realsense-viewer里升级成推荐的版本。有时版本不对可能出现一些报错。
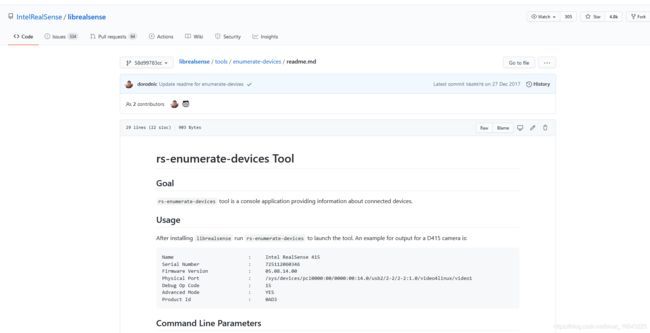
查看D435i有哪些帧率和分辨率,用的命令:rs-enumerate-device
realsense的github上有介绍
https://github.com/IntelRealSense/realsense-ros

https://github.com/IntelRealSense/librealsense/blob/58d99783cc2781b1026eeed959aa3f7b562b20ca/tools/enumerate-devices/readme.md

启动D435i的launch文件我也有专门一篇博文写。
https://blog.csdn.net/sinat_16643223/article/details/114272431
。