MATLAB数字图像处理 实验四:图像分割
目录
- 一、实验目的
- 二、实验环境
- 三、实验内容
-
- 题目
- 相关知识
- 部分核心代码
- 实验结果
- 实验结果分析
- 四、实验小结
一、实验目的
1、理解图像分割的基本概念。
2、掌握阈值法、K-means聚类方法、边缘提取及区域生长和分裂方法进行图像分割。
二、实验环境
Matlab 2020B
三、实验内容
题目
1、分别采用两种阈值选取方法实现图像分割(如全局阈值、OTSU等),要求根据阈值选取的思想自己写代码。(分割图像可自由选择)
2、采用K-means聚类算法实现图像分割,要求根据K-means的思想自己写代码。(分割图像可自由选择)
3、分别用Roberts,Sobel和拉普拉斯高斯算子对图像进行边缘检测(可使用系统函数),比较三种算子处理的不同之处。
4、选择适当方法实现肺的分割,结果包括两部分:肺(白色显示)和背景(黑色显示)。

相关知识
实现图像分割时,需要进行阈值选取。阈值选取可以使用全局阈值法、Otsu法这两种阈值选取法。
全局阈值法过程如下:1.为全局阈值选取一个初始估计值 T T T。2.使用 T T T分割图像,产生了两组像素:由所有灰度值大于 T T T的像素组成的 G 1 G_1 G1,由所有灰度值小于等于 T T T的像素组成的 G 2 G_2 G2。3.分别计算区域 G 1 G_1 G1和 G 2 G_2 G2中像素的平均灰度值 m 1 m_1 m1和 m 2 m_2 m2。4.计算一个新的阈值: T = 1 2 ( m 1 + m 2 ) T=\frac 12(m_1+m_2) T=21(m1+m2)。5.重复步骤2到4,直到后续迭代中 T T T的差小于一个预定义的 Δ T \Delta T ΔT为止。此时所得到 T T T的为图像分割所需的阈值。
Otsu方法可以进行最佳全局阈值处理。首先预处理出图像的直方图分量。 p q = n q n , q = 0 , 1 , 2 , . . . , L − 1 p_q=\frac{n_q}n,q=0,1,2,...,L-1 pq=nnq,q=0,1,2,...,L−1,其中 L L L为灰度级数, n n n为图像中像素点的总数, n q n_q nq为灰度级为 q q q的像素点的总数量。对 p q p_q pq进行前缀和运算,求得 P 1 ( k ) = ∑ i = 0 k p i P_1(k)=\sum_{i=0}^{k}p_i P1(k)=∑i=0kpi,则 P 2 ( k ) = ∑ i = k + 1 L − 1 p i = 1 − p 1 ( k ) P_2(k)=\sum_{i=k+1}^{L-1}p_i=1-p_1(k) P2(k)=∑i=k+1L−1pi=1−p1(k)。记整个图像的平均灰度 m G = ∑ i = 0 L − 1 i p i m_G=\sum_{i=0}^{L-1}ip_i mG=∑i=0L−1ipi。取 m ( k ) = ∑ i = 0 k i p i m(k)=\sum_{i=0}^kip_i m(k)=∑i=0kipi,则类间方差可写作 σ B 2 ( k ) = [ m G P 1 ( k ) − m ( k ) ] 2 P 1 ( k ) [ 1 − P 1 ( k ) ] \sigma^2_B(k)=\frac{[m_GP_1(k)-m(k)]^2}{P_1(k)[1-P_1(k)]} σB2(k)=P1(k)[1−P1(k)][mGP1(k)−m(k)]2:使得类间方差 σ B 2 ( k ) \sigma_B^2(k) σB2(k)取得最大值的 k k k即为图像分割的阈值。
采用K-means算法实现图像分割时,流程如下:
1.首先需要给定 k k k个初始聚类中心 c 1 , c 2 , . . . , c k c_1,c_2,...,c_k c1,c2,...,ck。
2.循环的迭代进行步骤2~步骤4,直到聚类中心不再变化或迭代次数达到预设的上限。
3.计算每个点 p p p到每个聚类中心的距离 d i d_i di,将像素点 p p p归入离聚类中心 d j d_j dj最近的点,标记为第 j j j类点。
4.在将所有对于聚类中心 c 1 , c 2 , . . . , c k c_1,c_2,...,c_k c1,c2,...,ck,计算新的聚类中心的值。记 c i ′ c_i' ci′为被标记为第 i i i类点的所有点的平均值,更新 c i ′ c_i' ci′。
5.得到最终的聚类中心 c 1 ′ , c 2 ′ , . . . , c k ′ c_1',c_2',...,c_k' c1′,c2′,...,ck′。
在本实验中,处理图像利用K-means算法时,一种可能的实例化方案如下:“聚类中心”指的就是rgb的值 c 1 , c 2 , . . . , c k c_1,c_2,...,c_k c1,c2,...,ck。“距离”指的就是当前像素点的rgb值与各个“聚类中心”的rgb值欧氏距离、曼哈顿距离或其他形式的距离。在算法运行完成得到的最终“聚类中心” c 1 ′ , c 2 ′ , . . . , c k ′ c_1',c_2',...,c_k' c1′,c2′,...,ck′后,所有像素点都以与“聚类中心”的“距离”被重新分类、重新赋予新的颜色或rgb值,从而完成了图像前景与背景的分离。
在利用Roberts算子进行边缘检测时,实质就是用此掩膜对矩阵每个点进行运算: G x = ( 1 0 0 − 1 ) G_x=\begin{pmatrix}1&0\\0&-1\end{pmatrix} Gx=(100−1), G y = ( 0 − 1 1 0 ) G_y=\begin{pmatrix}0&-1\\1&0\end{pmatrix} Gy=(01−10)。对于输入像素 f ( i , j ) f(i,j) f(i,j),输出像素 g ( i , j ) g(i,j) g(i,j),则: g ( x , y ) = ( f ( x , y ) − f ( x + 1 , y + 1 ) ) 2 + ( f ( x + 1 , y ) − f ( x , y + 1 ) ) 2 g(x,y)=\sqrt {(f(x,y)-f(x+1,y+1))^2+(f(x+1,y)-f(x,y+1))^2} g(x,y)=(f(x,y)−f(x+1,y+1))2+(f(x+1,y)−f(x,y+1))2
在利用Sobel算子进行边缘检测时,使用到的掩膜如下:
( − 1 0 1 − 2 0 2 − 1 0 1 ) \begin{pmatrix}-1&0&1\\-2&0&2\\-1&0&1\end{pmatrix} ⎝ ⎛−1−2−1000121⎠ ⎞用于计算在 x x x轴方向上的梯度 ∂ P ∂ x \frac{\partial P}{\partial x} ∂x∂P, ( − 1 − 2 − 1 0 0 0 1 2 1 ) \begin{pmatrix}-1&-2&-1\\0&0&0\\1&2&1\end{pmatrix} ⎝ ⎛−101−202−101⎠ ⎞用于计算在 y y y轴方向上的梯度 ∂ P ∂ y \frac{\partial P}{\partial y} ∂y∂P。
部分核心代码
I=imread("couplenew.png");
I=im2gray(I);
I=im2double(I);
I=im2bw(I,127/255);
imshow(I)
随意地选取了一个灰度级作为阈值,对图像进行分割。
I=imread("lab41.jpg");
I=im2gray(I);
I=im2double(I);
[h,w]=size(I);
eps=1e-6;
T=graythresh(I);
I=im2bw(I,T);
imshow(I)
调用函数graythresh求解阈值,对图像进行分割。graythresh用于计算图像的Otsu阈值。
I=imread("couplenew.png");
I=im2gray(I);
I=im2double(I);
[h,w]=size(I);
eps=1e-6;
T1=0.5;
T2=1;
while(abs(T2-T1)>=eps)
T2=T1;
G1=0;
G1cnt=0;
G2=0;
G2cnt=0;
for i=1:h
for j=1:w
if I(i,j)>T1
G2=G2+I(i,j);
G2cnt=G2cnt+1;
else
G1=G1+I(i,j);
G1cnt=G1cnt+1;
end
end
end
m1=G1/G1cnt;
m2=G2/G2cnt;
T1=1/2*(m1+m2);
end
I=im2bw(I,T1);
imshow(I);
利用基本的全局阈值处理方法,计算图像的阈值。
I=imread("couplenew.png");
I=im2gray(I);
[h,w]=size(I);
%hist=histogram(I);
nq=zeros(1,256);
for i=1:h
for j=1:w
nq(I(i,j)+1)=nq(I(i,j)+1)+1;
end
end
p=zeros(1,256);
for i=1:256
p(i)=nq(i)/(h*w);
end
maxpos=1;
maxsigma=0;
P=zeros(1,256);
P(1)=p(1);
for i=2:256
P(i)=P(i-1)+p(i);
end
mg=sum(sum(I))/(h*w);
for k=1:256
mk=0;
for i=1:k
mk=mk+(i-1)*p(i);
end
if (P(k)==0||P(k)==1)
sigma=0;
else
sigma=(mg*P(k)-mk).^2/(P(k)*(1-P(k)));
end
if sigma>maxsigma
maxsigma=sigma;
maxpos=k;
end
end
I=im2double(I);
I=im2bw(I,maxpos/255);
imshow(I)
利用Otsu算法计算图像的阈值。算法的思路、过程与前文是完全一致的。
%K-Means算法实现图像分割
k=2;
I = imread('lab41.jpg');
figure;
subplot(2,2,1);
imshow(I),title('原始图像');
gray=rgb2gray(I);
[m,n]=size(gray);
I = reshape(I(:, :, 1), m*n, 1);
res = kmeans(double(I), k);
result = reshape(res, m, n);
subplot(2,2,2);
imshow(label2rgb(result)),title(strcat('K=',num2str(k),'时RGB通道分割结果'));
res = kmeans(double(I), k+1);
result = reshape(res, m, n);
subplot(2,2,3);
imshow(label2rgb(result)),title(strcat('K=',num2str(k+1),'时RGB通道分割结果'));
res = kmeans(double(I), k+2);
result = reshape(res, m, n);
subplot(2,2,4);
imshow(label2rgb(result)),title(strcat('K=',num2str(k+2),'时RGB通道分割结果'));
调用系统自带的K-means算法,实现图像分割。
I=imread("lab41.jpg");
I=im2gray(I);
k=3;
Mu=[1,1,1;127,127,127;255,255,255];
eps=1e-6;
normMuDiff=[];
m=size(I,1);
n=size(I,2);
I=double(I);
M=reshape(I,m*n,size(I,3));
flag=1;
Cov=repmat(eye(size(I,3)),1,1,k); %k个聚类的协方差
Label=zeros(m*n,1);
iter=1;
figure;
for iter=1:5
old_Mu=Mu;
Num=zeros(1,k);
ClassedPixs=zeros(m*n,size(I,3),k); %分到k个类中的像素值
w=zeros(m*n,k); %各像素点对于聚类的权重矩阵
C=zeros(size(I,3),size(I,3),k);
for j=1:k
invCov=inv(Cov(:,:,j));
C(:,:,j)=invCov/norm(invCov);%使用Mahalanobis距离(即马氏距离)度量
end
for i=1:m*n
dis=zeros(k,1);
for j=1:k
dis(j)=(M(i,:)-Mu(j,:))*C(:,:,j)*(M(i,:)-Mu(j,:))';
end
maxIdx=find(dis==min(dis));
label=maxIdx(1);
Label(i)=label;
Num(label)=Num(label)+1;
ClassedPixs(Num(label),:,label)=M(i,:);
w(Num(label),label)=1/(sqrt(min(dis))+1); %避免被0除的情况
end
w=w./repmat(sum(w),m*n,1); %权重归一化
% 更新协方差Cov
for j=1:k
PixsThisClass=ClassedPixs(1:Num(j),:,j);
if Num(j)~=0
Cov(:,:,j)=cov(PixsThisClass)+0.01*rand(size(I,3)); %加随机量以防止矩阵奇异
Mu(j,:)=sum(repmat(w(1:Num(j),j),1,size(I,3)).*PixsThisClass);
end
end
normDiff=norm(old_Mu-Mu);
if normDiff<eps
flag=0;
end
normMuDiff=[normMuDiff;normDiff];
sg=reshape(Label,m,n);
end
imshow(mat2gray(sg))
实现了K-means算法,将其展开实现。先随机选取 k k k个聚类中心,度量每个像素点到每个聚类中心的“距离”并按“距离”分类。对所有像素点的分类完成后,根据每个像素点的类型计算更新其“聚类中心”的灰度级值。
I=imread("couplenew.png");
I=rgb2gray(I);
I=im2double(I);
I=imbinarize(I);
[h,w]=size(I);
newimg=zeros(h,w);
for i=1:h-1
for j=1:w-1
temp=(I(i,j)-I(i+1,j+1)).^2+(I(i+1,j)-I(i,j+1)).^2;
newimg(i,j)=sqrt(temp);
end
end
subplot(1,2,1);imshow(I);
subplot(1,2,2);imshow(newimg);
实现了利用Roberts算子对图像进行边缘检测。
I=imread('couplenew.png');
I=im2gray(I);
I=im2double(I);
G=I;
[h,w]=size(I);
res=zeros(h,w);
for i=2:h-1
for j=2:w-1
gx=-G(i-1,j-1)-2*G(i-1,j)-G(i-1,j+1)+G(i+1,j-1)+2*G(i+1,j)+G(i+1,j+1);
gy=-G(i-1,j-1)-2*G(i,j-1)-G(i+1,j-1)+G(i-1,j+1)+2*G(i,j+1)+G(i+1,j+1);
res(i,j)=sqrt(gx.^2+gy.^2);
end
end
res=res-G;
subplot(1,2,1);imshow(G);
subplot(1,2,2);imshow(res);
实现了利用Sobel算子对图像进行边缘检测。
I = imread('couplenew.png');
I=im2gray(I);
I=im2double(I);
I1=edge(I,"Roberts");
subplot(2,2,1);imshow(I);title("原图")
subplot(2,2,2);imshow(I1);title("Roberts")
I2=edge(I,"Sobel");
subplot(2,2,3);imshow(I2);title("Sobel")
I3=edge(I,"log");
subplot(2,2,4);imshow(I3);title("log")
调用系统函数实现了Roberts算子、Sobel算子、log算子的图像边缘检测。
I=imread("lung.png");
I=im2gray(I);
I=im2double(I);
subplot(2,2,1);imshow(I);title("原图")
[h,w]=size(I);
eps=1e-6;
T1=0.5;
T2=1;
while(abs(T2-T1)>=eps)
T2=T1;
G1=0;
G1cnt=0;
G2=0;
G2cnt=0;
for i=1:h
for j=1:w
if I(i,j)>T1
G2=G2+I(i,j);
G2cnt=G2cnt+1;
else
G1=G1+I(i,j);
G1cnt=G1cnt+1;
end
end
end
m1=G1/G1cnt;
m2=G2/G2cnt;
T1=1/2*(m1+m2);
end
I=im2bw(I,T1);
I=imcomplement(I);
subplot(2,2,2);imshow(I);title("二值化")
L=bwlabel(I,8); %连通标记
s = regionprops(I,'Area');%计算各个连通区域面积
I=ismember(L,find([s.Area]<=18000&[s.Area]>=400));
subplot(2,2,3);imshow(I);title("去背景")
se = strel('disk',7);
I=imclose(I,se);
subplot(2,2,4);imshow(I);title("闭操作")
实现了对肺部的分割,首先利用迭代得到分割的阈值,之后将黑白部分翻转。找出图像中所有8连通域,计算各个连通区域的面积,忽略面积过大的部分(背景)和面积过小的部分,从而正确地识别出两个肺。为了满足题目要求,把肺全部白色显示,还需要进行形态学操作的闭运算,过滤掉肺中的噪点与纹路。
实验结果

随意选取一个数值作为阈值,对图像进行二值化。

调用graythresh,所得结果为阈值,对图像进行二值化。

使用全局阈值法,对图像进行二值化。

使用全局阈值法,对图像进行二值化。

使用系统函数实现kmeans进行图像分割。

自行编写函数,实现kmeans进行图像分割。k=3

自行编写函数实现Roberts算子的边缘检测。
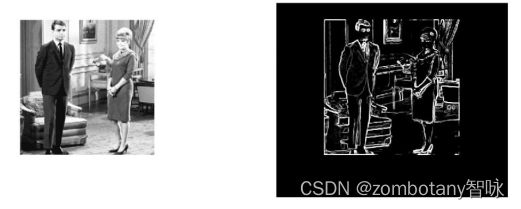
自行编写函数实现Sobel算子的边缘检测。

自行编写函数实现各种算子的边缘检测。

实现肺的分割。首先对图像进行二值化,然后过滤掉背景,最后对肺进行形态学操作的闭运算。
实验结果分析
实验需要比较分析不同边缘检测算子的效果与不同之处。其中,Roberts算子不自带平滑效果,对噪声较为敏感,但对边缘定位准确。Sobel算子检测的图像边缘宽度可能大于两个像素。对灰度渐变的低噪声图像存在良好的检测效果,但对混合的多复杂噪声图像效果不明显。Log算子自带平滑效果,但在平滑效果较好时,图像细节损失也大,边缘精度也会降低。