PX4学习(2)——原生固件框架分析
本文转自阿木社区:
搭建好了编译环境,装上了QT,就迫不及待的想看看代码的内容,结果。。。一看框架是懵逼的状态。。。怎么办,查阅资料慢慢梳理呗~
框架分析(一)
推荐一个比较好的参考资料:PX4中文维基 https://legacy.gitbook.com/book/fantasyjxf/px4-wiki/details
一 原生固件工程目录源码分析
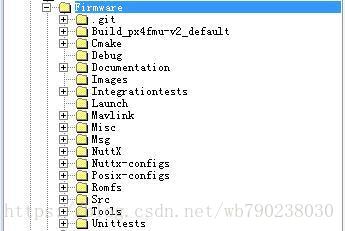
这是原生固件的目录视图
总目录结构
Src:目录是源码目录存放所有的源码,源码的查看都应该在这里。
Mavlink:是MAvlink的库目录,源码要调用这个库,如果我们要修改和添加MAVLINLK消息ID也是在这个目录下面。
NuttX:是NuttX的系统库,如果做二次开发,很少用到这个库。
Cmake:是存放的Cmake编辑脚本文件夹,其中Cmake/Configs是存放的不同硬件的编译脚本,nuttx_mindpx-v2_default是PIXHAWK这个硬件的编辑脚本,如果要添加驱动,添加系统功能的模块函数,要修改里面的编译选项,保证添加的模块文件,能够被编译到。
Romfs:是文件系统文件夹。里面存放的飞控系统的启动脚本,我们要修改启动脚本主要在这个文件夹里面。src/Romfs/px4fmu_common/init.d ,如rcS主要的启动脚本,还有其他的rc.XXX的脚本,传感器脚本,参数脚本等等,反正负责系统初始化的,如果自己定写了个功能模块要随系统启动那么就在这里添加启动。和linux系统的启动脚本非常相似。
Msg:是存放UORB消息主题的地方,如果要二次开发添加消息主题,就在这个文件夹里面添加修改。
子目录结构
Src这个文件夹比较重要,详细看看:
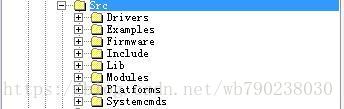
其中Drivers是驱动文件夹,包括了所有的传感器驱动,三轴,地磁,加速度,超声波....
Examples是实例文件夹,入门PIXHAEK开发的一些很好的例子就在里面,其中最经典的是 px4_simple_app这个例子,要搞明白进程间通信UORB就是这个例程。
Modules是功能模块文件夹,什么位置估计,位置控制,指令控制....都在这个文件夹,也是二次开发主要要修改的文件夹。
Systemcmds是系统指令文件夹,都是飞控的支持的命令的源码。比如top命令,reboot命令等等,这些命令都可以在终端操作。
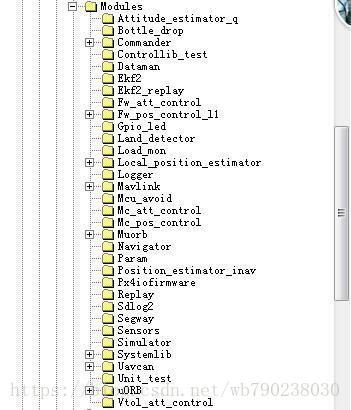
这是modules的文件夹下面的东西,很清楚,姿态估计,位置估计,位置控制,导航,UORB源码等等相当于飞控代码的核心。

这是Drivers文件夹里面的内容,可以看到所有的传感器驱动都在这里面,气压计,GPS,加速度,地磁,光流等等。
整个工程框架还是非常清楚明了的,结构清楚,对于开发也很有利。主要就是修改moudlse,divers文件里面的内容。如果要添加好了文件,nuttx_mindpx-v2_default在这里面
框架分析(二)
PX4自动驾驶仪软件可分为三大部分:实时操作系统、中间件和飞行控制栈。
1.NuttX实时操作系统
提供POSIX-style的用户操作环境(如printf(), pthreads,/dev/ttyS1,open(),write(),poll(),ioctl()),进行底层的任务调度。
2.PX4中间件
PX4中间件运行于操作系统之上,提供设备驱动和一个微对象请求代理(micro object request broker,uORB)用于驾驶仪上运行的单个任务之间的异步通信。Px4被3DR开源后,整个代码结构被⼤改,原先的系统被摒弃,进而采用Nuttx,但是核心思想没变-为了简化开发而采用牺牲部分效率的消息传递机制,这是Px4 与ArduPilot 最本质的差别。
3.PX4飞行控制栈
飞行控制栈可以使用PX4的控制软件栈,也可以使用其他的控制软件,如APM:Plane、APM:Copter,但必须运行于PX4中间件之上。
此部分又可分为
决策导航部分:根据飞行器自身安全状态和接收到的命令,决定工作于什么模式,下一步应该怎么做。
位置姿态估计部分:根据传感器得到自身的位置和姿态信息,此部分算法含金量最高,算法也相当多。
位置姿态控制部分:根据期望位置和姿态设计控制结构,尽可能快、稳的达到期望位置和姿态。
控制器输出部分:mixer和执行器,pwm限幅。


算法在Firmware/src/modules,驱动在Firmware/src/drivers
px4原生固件模块列表:
系统命令程序
mavlink –通过串口发送和接收mavlink信息
sdlog2 –保存系统日志/飞行数据到SD卡
tests –测试系统中的测试程序
top –列出当前的进程和CPU负载
uORB – 微对象请求代理器-分发其他应用程序之间的信息
驱动
mkblctrl–blctrl电子模块驱动
esc_calib –ESC的校准工具
fmu –FMU引脚输入输出定义
gpio_led –GPIO LED驱动
gps –GPS接收器驱动
pwm –PWM的更新速率命令
sensors –传感器应用
px4io –px4io驱动
uavcan –uavcan驱动
飞行控制的程序
飞行安全和导航
commander –主要飞行安全状态机
navigator –任务,失效保护和RTL导航仪
估计姿态和位置
attitude_estimator_ekf –基于EKF的姿态估计
ekf_att_pos_estimator –基于EKF的姿态和位置估计
position_estimator_inav–惯性导航的位置估计
multirotor姿态和位置控制器
mc_att_control–multirotor姿态控制器
mc_pos_control –multirotor位置控制器
fixedwing姿态和位置控制器
fw_att_control –固定翼飞机的姿态控制
fw_pos_control_l1 –固定翼位置控制器
垂直起降姿态控制器
vtol_att_control –垂直起降姿态控制器
3.1决策
3.1.1 任务决策。以任务为导向,任务决策主要决定多旋翼下一步“去哪儿”,进一步,需要规划路径,使得整个过程能满足诸如:飞向航路点并沿航线飞,以及飞向航路点并避障等要求。
3.1.2 健康管理和失效保护。以安全为导向, 失效保护主要决定多旋翼下一步“去哪儿”。多旋翼飞行器在飞行前或飞行中,可能会发生通信故障、传感器失效和动力系统异常等,这些意外会直接导致控制任务无法完成。这一部分包括安全问题的介绍、机载设备的健康评估、机载设备的健康监测、失效后的保护建议。
传感器校正在commander里面
对应的程序在Firmware/src/modules/commander和Firmware/src/modules/navigator
完成任务模式切换,同时考虑电池电量、GPS等传感器是否正常工作等信息。

commander
orb_publish(ORB_ID(home_position), homePub, &home);
orb_publish(ORB_ID(offboard_mission), mission_pub, &mission);
orb_publish(ORB_ID(vehicle_control_mode), control_mode_pub, &control_mode);
orb_publish(ORB_ID(vehicle_status), status_pub, &status);
orb_publish(ORB_ID(actuator_armed), armed_pub, &armed);
orb_publish(ORB_ID(vehicle_command_ack), command_ack_pub, &command_ack);
orb_copy(ORB_ID(vehicle_status), state_sub, &state);
orb_copy(ORB_ID(parameter_update), param_changed_sub,¶m_update;
orb_copy(ORB_ID(manual_control_setpoint), sp_man_sub, &sp_man);
orb_copy(ORB_ID(offboard_control_mode), offboard_control_mode_sub, &offboard_control_mode);
orb_copy(ORB_ID(telemetry_status), telemetry_subs[i], &telemetry);
orb_copy(ORB_ID(sensor_combined), sensor_sub, &sensors);
orb_copy(ORB_ID(differential_pressure), diff_pres_sub, &diff_pres);
orb_copy(ORB_ID(system_power), system_power_sub, &system_power);
orb_copy(ORB_ID(safety), safety_sub, &safety);
orb_copy(ORB_ID(vtol_vehicle_status), vtol_vehicle_status_sub, &vtol_status);
orb_copy(ORB_ID(vehicle_global_position), global_position_sub, &gpos);
orb_copy(ORB_ID(vehicle_local_position), local_position_sub, &local_position);
orb_copy(ORB_ID(vehicle_attitude), attitude_sub, &attitude);
orb_copy(ORB_ID(vehicle_land_detected), land_detector_sub, &land_detector);
orb_copy(ORB_ID(battery_status), battery_sub, &battery);
orb_copy(ORB_ID_VEHICLE_ATTITUDE_CONTROLS, actuator_controls_sub, &actuator_controls);
orb_copy(ORB_ID(subsystem_info), subsys_sub, &info);
orb_copy(ORB_ID(position_setpoint_triplet), pos_sp_triplet_sub, &pos_sp_triplet);
orb_copy(ORB_ID(vehicle_gps_position), gps_sub, &gps_position);
orb_copy(ORB_ID(mission_result), mission_result_sub, &mission_result);
orb_copy(ORB_ID(geofence_result), geofence_result_sub, &geofence_result);
orb_copy(ORB_ID(vehicle_command), cmd_sub, &cmd);navigator
orb_publish(ORB_ID(position_setpoint_triplet), _pos_sp_triplet_pub, &_pos_sp_triplet);
orb_publish(ORB_ID(mission_result), _mission_result_pub, &_mission_result);
orb_publish(ORB_ID(geofence_result), _geofence_result_pub, &_geofence_result);
orb_publish(ORB_ID(vehicle_attitude_setpoint), _att_sp_pub, &_att_sp);
orb_copy(ORB_ID(vehicle_global_position), _global_pos_sub, &_global_pos);
orb_copy(ORB_ID(vehicle_gps_position), _gps_pos_sub, &_gps_pos);
orb_copy(ORB_ID(sensor_combined), _sensor_combined_sub, &_sensor_combined);
orb_copy(ORB_ID(home_position), _home_pos_sub, &_home_pos);
orb_copy(ORB_ID(navigation_capabilities), _capabilities_sub, &_nav_caps);
orb_copy(ORB_ID(vehicle_status), _vstatus_sub, &_vstatus)
orb_copy(ORB_ID(vehicle_control_mode), _control_mode_sub, &_control_mode)
orb_copy(ORB_ID(parameter_update), _param_update_sub, ¶m_update);
orb_copy(ORB_ID(vehicle_command), _vehicle_command_sub, &cmd);3.2位置估计和姿态估计
此部分需要大量理论知识,暂时还比较欠缺。
sensors是对陀螺仪、加速度计地磁计的一个处理
sensors
orb_publish(ORB_ID(airspeed), _airspeed_pub, &_airspeed);
orb_publish(ORB_ID(differential_pressure), _diff_pres_pub, &_diff_pres);
orb_publish(ORB_ID(battery_status), _battery_pub, &_battery_status);
orb_publish(ORB_ID(rc_channels), _rc_pub, &_rc);
orb_publish(ORB_ID(manual_control_setpoint), _manual_control_pub, &manual);
orb_publish(ORB_ID(actuator_controls_3), _actuator_group_3_pub, &actuator_group_3);
orb_publish(ORB_ID(sensor_combined), _sensor_pub, &raw);
orb_copy(ORB_ID(sensor_accel), _accel_sub[i], &accel_report);
orb_copy(ORB_ID(sensor_gyro), _gyro_sub[i], &gyro_report);
orb_copy(ORB_ID(sensor_mag), _mag_sub[i], &mag_report);
orb_copy(ORB_ID(sensor_baro), _baro_sub[i], &_barometer);
orb_copy(ORB_ID(differential_pressure), _diff_pres_sub, &_diff_pres);
orb_copy(ORB_ID(vehicle_control_mode), _vcontrol_mode_sub, &vcontrol_mode);
orb_copy(ORB_ID(parameter_update), _params_sub, &update);
orb_copy(ORB_ID(rc_parameter_map), _rc_parameter_map_sub, &_rc_parameter_map);
orb_copy(ORB_ID(input_rc), _rc_sub, &rc_input);
ardrone_interface
orb_publish(ORB_ID(actuator_outputs), pub, &outputs);
orb_copy(ORB_ID_VEHICLE_ATTITUDE_CONTROLS, actuator_controls_sub, &actuator_controls);
#define ORB_ID_VEHICLE_ATTITUDE_CONTROLS ORB_ID(actuator_controls_0)
orb_copy(ORB_ID(actuator_armed), armed_sub, &armed);
batt_smbus
orb_publish(_batt_orb_id, _batt_topic, &new_report);
orb_copy(ORB_ID(battery_status), sub, &status)
bma180
orb_publish(ORB_ID(sensor_accel), _accel_topic, &report);
GPS
orb_publish(ORB_ID(vehicle_gps_position), _report_gps_pos_pub, &_report_gps_pos);
orb_publish(ORB_ID(satellite_info), _report_sat_info_pub, _p_report_sat_info);
hmc5883
orb_publish(ORB_ID(sensor_mag), _mag_topic, &new_report);
hott
orb_publish(ORB_ID(esc_status), _esc_pub, &esc);
orb_copy(ORB_ID(sensor_combined), _sensor_sub, &raw);
orb_copy(ORB_ID(battery_status), _battery_sub, &battery);
orb_copy(ORB_ID(airspeed), _airspeed_sub, &airspeed);
orb_copy(ORB_ID(esc_status), _esc_sub, &esc);
l3gd20
orb_publish(ORB_ID(sensor_gyro), _gyro_topic, &report);
lsm303d
orb_publish(ORB_ID(sensor_accel), _accel_topic, &accel_report);
orb_publish(ORB_ID(sensor_mag), _mag->_mag_topic, &mag_report);
mpu6000
orb_publish(ORB_ID(sensor_accel), _accel_topic, &arb);
orb_publish(ORB_ID(sensor_gyro), _gyro->_gyro_topic, &grb);
mpu9250
orb_publish(ORB_ID(sensor_accel), _accel_topic, &arb);
orb_publish(ORB_ID(sensor_gyro), _gyro->_gyro_topic, &grb);
ms5611
orb_publish(ORB_ID(sensor_baro), _baro_topic, &report);
pwm_out_sim
orb_publish(ORB_ID(actuator_outputs), _outputs_pub, &outputs);
orb_copy(_control_topics[i], _control_subs[i], &_controls[i]);
actuator_controls_s _controls[actuator_controls_s::NUM_ACTUATOR_CONTROL_GROUPS];
orb_copy(ORB_ID(actuator_armed), _armed_sub, &aa);
px4flow
orb_publish(ORB_ID(optical_flow), _px4flow_topic, &report);
orb_publish(ORB_ID(distance_sensor), _distance_sensor_topic, &distance_report);
orb_publish(ORB_ID(subsystem_info), pub, &info);
px4fmu
orb_publish(ORB_ID(actuator_outputs), _outputs_pub, &outputs);
orb_publish(ORB_ID(safety), _to_safety, &safety);
orb_publish(ORB_ID(input_rc), _to_input_rc, &_rc_in);
orb_copy(_control_topics[i], _control_subs[i], &_controls[i]);
orb_copy(ORB_ID(actuator_armed), _armed_sub, &_armed);
orb_copy(ORB_ID(parameter_update), _param_sub, &pupdate);
px4io
orb_publish(ORB_ID(vehicle_command), pub, &cmd);
orb_publish(ORB_ID(safety), _to_safety, &safety);
orb_publish(ORB_ID(battery_status), _to_battery, &battery_status);
orb_publish(ORB_ID(servorail_status), _to_servorail, &_servorail_status);
orb_publish(ORB_ID(input_rc), _to_input_rc, &rc_val);
orb_publish(ORB_ID(actuator_outputs), _to_outputs, &outputs);
orb_publish(ORB_ID(multirotor_motor_limits), _to_mixer_status, &motor_limits);
orb_copy(ORB_ID(actuator_armed), safety_sub, &safety);
orb_copy(ORB_ID(vehicle_command), _t_vehicle_command, &cmd);
orb_copy(ORB_ID(parameter_update), _t_param, &pupdate);
orb_copy(ORB_ID(actuator_controls_0), _t_actuator_controls_0, &controls);
orb_copy(ORB_ID(actuator_controls_x), _t_actuator_controls_0, &controls);
orb_copy(ORB_ID(vehicle_control_mode), _t_vehicle_control_mode, &control_mode);
stm32(adc)
orb_publish(ORB_ID(system_power), _to_system_power, &system_power);
3.3位置控制和姿态控制


3.4pwm输出
3.4.1mixer
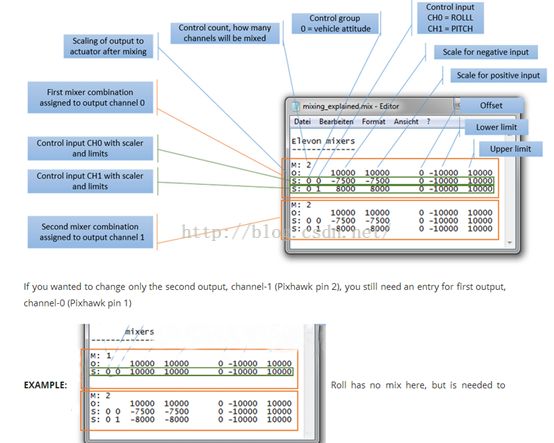
官方地址(已失效)对应的内容
混合器输出定义控制器的输出是如何映射到电机和伺服输出。所有内置mixer文件位于ROM文件系统的/etc/mixers目录,并编译成固件。Mixer是一组独立的映射器,从控制读入写入,写入执行器输出。一个模块,结合一组根据预先定义的规则和参数的输入,产生一组输出。

(1)语法:
Mixer的定义是文本文件,用一个大写字母后跟一个冒号开头的行。所有其他的行都会被忽略,这意味着解释性文本可与定义相混合。每个文件可以定义多个Mixer。由一个Mixer产生的执行器输出的数量是特定的。
起始形式如下:
标签选择Mixer的类型,“M”为一种简单求和Mixer,“R”为多转子(多旋翼)Mixer等。
一个空的Mixer不消耗控制,并产生一个执行机构的输出,其值始终为零。通常一个空的Mixer被用作占位符Mixer的集合中,以实现制动器输出的特定模式。
空的Mixer定义形式:
Z:
(2)简单的Mixer
一个简单的Mixer的开始:
M:
O: <-ve scale> <+ve scale>
如果为零,则输出就为零,Mixer输出的固定值是受限制的。
第二行定义了输出输出定标器和标量参数。虽然计算作为浮点运算进行的,存储在所述定义文件中的值是由10000倍缩放,-0.5偏移被编码为-5000.
该定义继续描述控制输入和缩放项:
S:
这些值定义了控制组从那些定标器中读取数据,和该组内的值的偏移。是特定于设备读取Mixer的定义。
当用于混合车辆的控制,混合器组0是车辆姿态控制组,索引值从0到3通常分别是:roll,pitch,yaw,thrust。
具体详解见:https://pixhawk.org/dev/mixing?s[]=mixer
(3)多旋翼Mixer
在多旋翼混合器结合四个控制输入(roll,pitch,yaw,thrust)为一组用于驱动电机速度控制器制动输出。
Mixer定义的形式:
R:
参数解释:
机械:包括quad(4x,4+),hex(6x,6+),octo(8x,8+)
单独的roll,pitch和yaw控制因子
电机输出死区
框架分析(三)
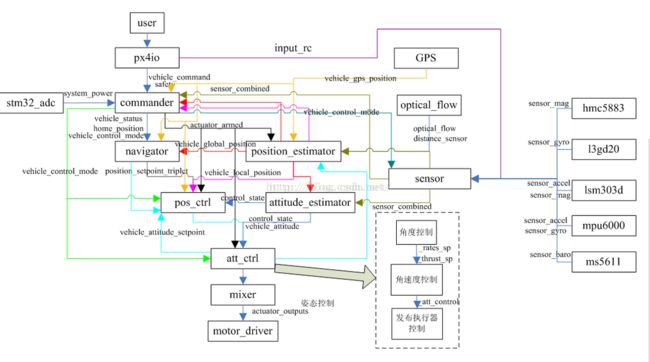
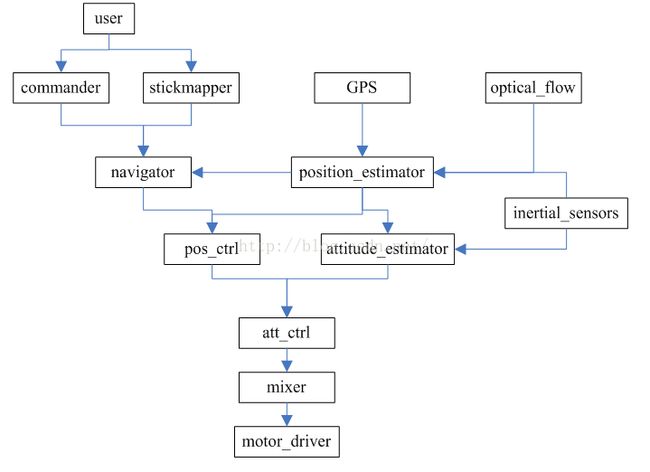
今天先说一下系统框架,之后的整理先说主要的四个文件:姿态的解算和控制,位置解算和控制,这四个文件之所以重点分析是因为他们可以看作飞机协议栈的中间层,向下是一些硬件的驱动drive/和一些命令commander/以及导航navigator/。commander和navigator给出了一些底层的命令和规划,产生一个position setpoint交给位置控制,位置控制根据现在的位置(位置解算)和期往的位置经过串级pid最终产生att_sp期往的姿态,之后姿态控制根据现在的姿态(姿态解算)和期望的姿态经过串级pid产生控制量actuators.control,控制量actuators.control向后交给mixer,具体的力矩分配由混控器自己去处理吧。
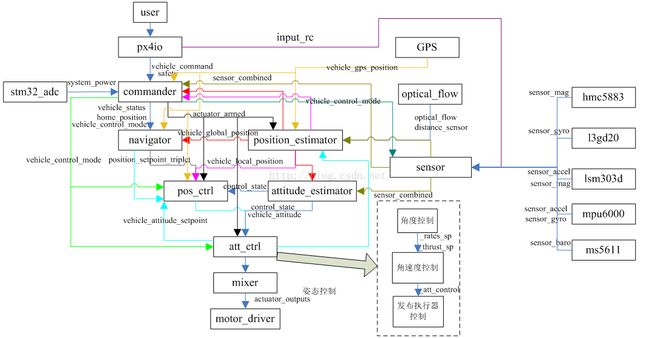
飞机整个大致的数据流如下:

飞机的通信依靠两种方式,飞机和外部之间通过mavlink通信,内部之间通过uorb通信。所以在飞机应用开发时,想实现定制功能,大致做两部分工作就好了:
其一:仿照其他的module模块,添加自己的模块,模块里做自己想做的事情,实现自己要求的功能。模块编辑完后后,添加到cmake编译配置文件中,这时你的模块就可以编译到固件之中。固件之中只是有你的代码,但是这时你的代码并没有启动,所以还需要在rcs启动文件中启动你的模块,如此两步你的模块就已经在系统之中正常工作。
其二:是信息流的问题,因为你的模块肯定需要从其他地方获取数据,处理好的数据肯定也需要publish出去。这一部分就是uorb进程间通信的问题,关于uorb一定要把他的基本使用完全掌握,这样整个信息流岂不是都在你手中。
uorb其实也就两部分,一部分是订阅数据,先订阅subscribe后拷贝copy,另一部分就是发布数据:先广播advert再发布publish。注意订阅和广播建议都写在主进程的初始化部分,因为他们只需要一次初始化操作。还有一点就是copy数据的问题,模块之中常用的是poll阻塞等待,模块使用它是为了保持大循环,其他地方取数据我更建议使用检查更新check,免得阻塞浪费资源影响他人。
懂得修改这两处,基本上就可以开发你的功能了,基于这一部分,我做了一点避障算法,低速避障效果很好,高速还有待完善。
下面再给大家几个整体图,供大家了解结构,如此先建立整体概念,方便入手。