最优化问题——线性规划(二)
最优化问题——线性规划(二)
在之前的文章最优化问题——线性规划(一)中,我们简单的介绍了线性规划问题的引入,基本形式和图解法求解。接下来,我们开始讲述线性规划问题的一般求解过程。
1、线性规划中的一些基本概念
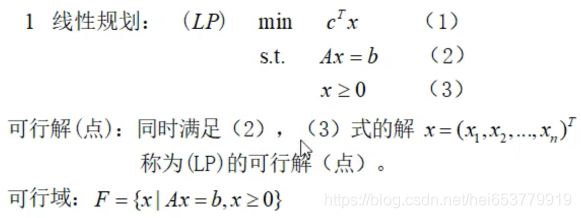
满足所有的约束条件的解称为可行解,所有的可行解组成的集合称为可行域。

这里,我们对线性规划的标准型进行一些变换,为了更好的理解上面的变换过程,我们下面举一个例子来说明一下:
我们给定变量 x 1 , x 2 , x 3 x_1,x_2,x_3 x1,x2,x3,给定下面的约束条件:
x 1 + 2 x 2 + 3 x 3 = b 1 x 1 + 2 x 2 + x 3 = b 2 x 1 + 2 x 2 + 2 x 3 = b 3 x_1+2x_2+3x_3=b_1\\ x_1+2x_2+x_3=b_2\\ x_1+2x_2+2x_3=b_3 x1+2x2+3x3=b1x1+2x2+x3=b2x1+2x2+2x3=b3
进一步,我们将上面的约束抽象成矩阵的形式:
A = 1 2 3 1 2 1 1 2 2 A = \begin{matrix}1&2&3\\ 1&2&1\\ 1&2&2\end{matrix} A=111222312
同时,将变量抽象成一个矩阵的形式有:
x = x 1 x 2 x 3 x=\begin{matrix}x_1\\ x_2\\ x_3\end{matrix} x=x1x2x3
对于A矩阵中的第一列,表示的是三个约束条件中关于 x 1 x_1 x1的系数,同理第二列和第三列也是如此。在转成上图所示的标准型之后,其求和的过程为
x 1 + x 1 + x 1 + 2 x 2 + 2 x 2 + 2 x 2 + 3 x 3 + x 3 + 2 x 3 = b 1 + b 2 + b 3 = b x_1+x_1+x_1+2x_2+2x_2+2x_2+3x_3+x_3+2x_3=b_1+b_2+b_3=b x1+x1+x1+2x2+2x2+2x2+3x3+x3+2x3=b1+b2+b3=b
这也就解释了上面的标准型的变化过程。
进一步,我们引入一些其他的概念:

这里的非退化的子矩阵B,代表的是矩阵B存在逆矩阵。

这里需要注意的是,B和N中的P是A中的一列。进一步,我们可以推导出如下的形式:

同时,如果非基变量不为0,则可以推导出下面的形式:

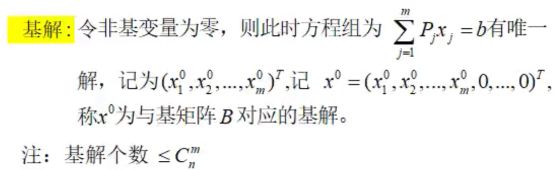
如果,非基变量为零,那么我们就可以计算出基解,我们给出基解的概念:
可行解: 满足约束条件AX=b,和各个元素 x i > 0 x_i>0 xi>0的解称为可行解。

我们下面举一个例子来将上面的概念再来理解一下有:

首先,我们计算出矩阵A为:
A = 1 − 2 − 1 4 2 2 − 2 − 1 A=\begin{matrix}1&-2&-1&4\\ 2&2&-2&-1\end{matrix} A=12−22−1−24−1
根据矩阵A可以值秩为2,所有我们确定矩阵 B 2 ∗ 2 B_{2*2} B2∗2这里我们选择前两列的元素来组成B,则有B为
B = 1 − 2 2 2 B=\begin{matrix}1&-2\\ 2&2\\ \end{matrix} B=12−22
下面令非基变量 x 3 = x 4 = 0 x_3=x_4=0 x3=x4=0,则可以计算出来:
{ x 1 − 2 x 2 = 8 2 x 1 + 2 x 2 = 2 \begin{cases}x_1-2x_2=8\\ 2x_1+2x_2=2\end{cases} {x1−2x2=82x1+2x2=2
解的一个基解为:
{ x 1 = 10 3 x 2 = − 7 3 \begin{cases}x_1=\frac{10}{3}\\ x_2=-\frac{7}{3}\end{cases} {x1=310x2=−37
这样,我们计算出来了一个基解 x = ( 10 3 , − 7 3 , 0 , 0 ) x=(\frac{10}{3},-\frac{7}{3},0,0) x=(310,−37,0,0),但是其不是基可行解。
进一步,我们取矩阵A的第1列和最后一列,也就是说 x 2 = x 3 = 0 x_2=x_3=0 x2=x3=0,计算方式与上述相同,最终的计算结果为: x = ( 16 9 . 0 , 0 , 14 9 ) T x=(\frac{16}{9}.0,0,\frac{14}{9})^T x=(916.0,0,914)T这是一个基解,也是一个基可行解。
进一步,我们给出可行解,基解,基可行解的关系图:

2、LP问题中关于解的相关定理
2.1 LP问题和凸集的相关特性
- 解的存在性:如果LP的可行域(带有约束的多面体)非空,则可行域是一个凸集,且LP问题一定存在有限最优解或者无界最优解。
- 解在顶点的可达性:若LP存在有限最优解,则最优解可以在某个顶点处达到。
- 顶点和基本可行解的关系: x 0 x_0 x0是LP的可行域的顶点的充要条件是 x 0 x_0 x0是LP的基本可行解。
2.1 A中的线性无关性
假设 x 0 = ( x 1 0 , x 2 0 , . . . . , x n 0 ) T ∈ F x^0=(x_1^0,x_2^0,....,x_n^0)^T∈F x0=(x10,x20,....,xn0)T∈F,则 x 0 x^0 x0是线性规划LP的基可行解等价于 x 0 x^0 x0中的各个正分量对应的A中的对应列是线性无关的。
2.2 极点

2.3 极点和解的相关定理

3、参考
- 最优化方法——Bilibili