cartographer 代码思想解读(4)- probability grid地图更新1
cartographer 代码思想解读(4)- probability grid地图更新
- grid map
- probability map
- probability map cell 初始化
- probability grid地图更新
前面3节分析cartographer 2d算法中的前端和闭环使用的匹配原理分析,采用的匹配方法均是采用scan-to-map的方法,比scan-to-scan的方法累计误差有所提高。其中匹配方法中的map如何获取,具体意义,本节通过分析相关源代码进行记录。
在第一节已经讲过,由于cartographer采用大量c++ 11.0特性,同时采用大量的继承、多态、虚函数等方法,代码组成较为复杂,阅读相对困难,但其原理较为简单。首先地图表示形式有多种,而最常用则是grid map,cartographer也不例外,grid存储内容的概率,因此称为probability map。在分析代码前,有许多博主对grid map有了详细的介绍,可以结合其他博客进行理解。
Occupancy Grid Map
占用栅格的数据结构
cartographer 源码中实际上提供grid map两种形式,一种为probability,另一种为tsdf。由于建图默认配置为probability,同时也是slam中最为熟悉的。因此仅分析probability 类型的grid map。
grid map
cartographer中定义了一个基类Grid2D,而匹配使用的ProbabilityGrid则为继承。Grid2D描述了地图具体形式和存储内容。其内部成员如下:
// 地图大小边界,包括x和y最大值, 分辨率, x和yu方向栅格数
MapLimits limits_;
//grid 地图存储值,采用uint16类型,
std::vector correspondence_cost_cells_;
// 对应实际意义的最大和最小边界
float min_correspondence_cost_;
float max_correspondence_cost_;
// 记录已经更新过的索引
std::vector update_indices_;
// 已知栅格状态的大小
Eigen::AlignedBox2i known_cells_box_;
// 此为查询表格,主要因为grid存储的uint16格式,可根据此表格将其对应成实际意义的如probability
const std::vector* value_to_correspondence_cost_table_;
grid2d作为基类,存储单元为uint16整型数,即0~65535,而不关心具体实际意义。其目的是方便代码复用,即建立不同的继承类。可通过value_to_correspondence_cost_table_表格进行还原真实表示意义。采用整数进行存储,其好处无需解释。而且此类中函数主要用于设置和访问的。
其中GrowLimits用于扩展此gridmap的大小,即当加入一个已知栅格状态时,需要判断并扩展当前gridmap。
// 更新地图大小,同时将原grid中数据按照位置放入新放大的grid中
void Grid2D::GrowLimits(const Eigen::Vector2f& point,
const std::vector*>& grids,
const std::vector& grids_unknown_cell_values) {
CHECK(update_indices_.empty());
//如果当前的存在point不在范围内,即需要更新,采用迭代方法放大地图边界,
while (!limits_.Contains(limits_.GetCellIndex(point))) {
//获取原来的地图大小的中心坐标,即栅格索引
const int x_offset = limits_.cell_limits().num_x_cells / 2;
const int y_offset = limits_.cell_limits().num_y_cells / 2;
// grid最大值更新原来的一半, 地图总大小放大一倍。 即从地图中心位置上下左右均放大原大小一半
const MapLimits new_limits(
limits_.resolution(),
limits_.max() +
limits_.resolution() * Eigen::Vector2d(y_offset, x_offset),
CellLimits(2 * limits_.cell_limits().num_x_cells,
2 * limits_.cell_limits().num_y_cells));
// 行数,用于转换1维索引
const int stride = new_limits.cell_limits().num_x_cells;
//新的offset
const int offset = x_offset + stride * y_offset;
//新大小
const int new_size = new_limits.cell_limits().num_x_cells *
new_limits.cell_limits().num_y_cells;
//更新grid概率,即将原来的概率赋值在新的grid中
for (size_t grid_index = 0; grid_index < grids.size(); ++grid_index) {
std::vector new_cells(new_size,
grids_unknown_cell_values[grid_index]);
for (int i = 0; i < limits_.cell_limits().num_y_cells; ++i) {
for (int j = 0; j < limits_.cell_limits().num_x_cells; ++j) {
new_cells[offset + j + i * stride] =
(*grids[grid_index])[j + i * limits_.cell_limits().num_x_cells];
}
}
*grids[grid_index] = new_cells;
}
limits_ = new_limits;
// 重新计算有效栅格空间边界,即由于起点发生改变,则矩形框的坐标需进行转换
if (!known_cells_box_.isEmpty()) {
known_cells_box_.translate(Eigen::Vector2i(x_offset, y_offset));
}
}
}
probability map
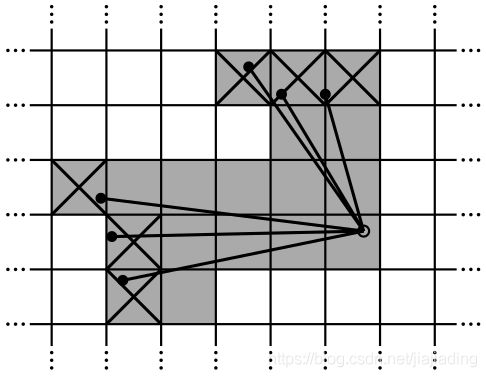
ProbabilityGrid是继承Grid2D,实际是具体描述了Grid2D单元存储内容的具体意义,即为概率。根据栅格地图基本原理可知,一个单元格最终想表示的障碍物是否存在,即三个状态:占有(hit),未占有(miss),未知。如原论文中激光光束模型,其中白色格表示未知状态,X表示占有,灰色表示free。但由于传感器噪声和栅格分辨率的问题,因此状态不会为确定值。因此我们将其以概率形式表示,包括占有概率和未占有概率。
代码目录cartographer/map/probability_values.h中定义了probability中单元格表示意义的转换关系。
// 概率用odd模型表示
inline float Odds(float probability) {
return probability / (1.f - probability);
}
//odd 转换为概率模型
inline float ProbabilityFromOdds(const float odds) {
return odds / (odds + 1.f);
}
// hit概率转换为free概率
inline float ProbabilityToCorrespondenceCost(const float probability) {
return 1.f - probability;
}
// free概率转换为hit概率
inline float CorrespondenceCostToProbability(const float correspondence_cost) {
return 1.f - correspondence_cost;
}
// 概率空间范围限制,默认0.1~0.9
constexpr float kMinProbability = 0.1f;
constexpr float kMaxProbability = 1.f - kMinProbability;
constexpr float kMinCorrespondenceCost = 1.f - kMaxProbability;
constexpr float kMaxCorrespondenceCost = 1.f - kMinProbability;
前面Grid2D基类也提过每个单元存储的为uint16的的整数,因此probability_values.h文件中也将对应概率值转换为1~32767之间,而0表示未知状态。
// Converts a correspondence_cost to a uint16 in the [1, 32767] range.
inline uint16 CorrespondenceCostToValue(const float correspondence_cost) {
return BoundedFloatToValue(correspondence_cost, kMinCorrespondenceCost,
kMaxCorrespondenceCost);
}
// Converts a probability to a uint16 in the [1, 32767] range.
inline uint16 ProbabilityToValue(const float probability) {
return BoundedFloatToValue(probability, kMinProbability, kMaxProbability);
// 具体转换公式
inline uint16 BoundedFloatToValue(const float float_value,
const float lower_bound,
const float upper_bound) {
const int value =
common::RoundToInt(
(common::Clamp(float_value, lower_bound, upper_bound) - lower_bound) *
(32766.f / (upper_bound - lower_bound))) +
1;
// DCHECK for performance.
DCHECK_GE(value, 1);
DCHECK_LE(value, 32767);
return value;
}
当然也包括value转换回hit概率和miss概率,即probability_values.h中定义了所有数据类型之间的转换函数,以及边界和数据的意义。
probability map cell 初始化
概率栅格图初始化即设置grid格的probability和获取对应的probability,其代码实现在cartographer/mapping/2d/probability_grid.c中。SetProbability表示的是在对应坐标下的grid cell设置其概率值。
// 设置对应index的概率值, 在cell单元存储的则是概率对应的free 占有率, 对应的uint16整形数
void ProbabilityGrid::SetProbability(const Eigen::Array2i& cell_index,
const float probability) {
// 取cell_index在栅格地图中对应索引的单元的地址
// ToFlatIndex, 二维坐标转换为1维索引
// mutable_correspondence_cost_cells() 返回的grid中grid地图
uint16& cell =
(*mutable_correspondence_cost_cells())[ToFlatIndex(cell_index)];
CHECK_EQ(cell, kUnknownProbabilityValue);
// 将概率值转换对应的整型数,然后存入对应的索引的单元中
cell =
CorrespondenceCostToValue(ProbabilityToCorrespondenceCost(probability));
// 返回的是有效概率值的矩形框,每更新一个cell, 则更新矩形框box, 采用eigen库extend,自动更新有效框
mutable_known_cells_box()->extend(cell_index.matrix());
}
通过以上代码分析可看出,由于初始化操作,即该单元为第一次赋值,而非更新,即需要判断当前cell是否未知状态,如果不是未知状态,则不能初始化,而是更新(下面会详细讲解)。同时可以看出cartographer的概率grid cell实际存储的是free probability对应的value值,即为空闲概率。
// Returns the probability of the cell with 'cell_index'.
// 返回对应的index的占有概率值
float ProbabilityGrid::GetProbability(const Eigen::Array2i& cell_index) const {
if (!limits().Contains(cell_index)) return kMinProbability;
return CorrespondenceCostToProbability(ValueToCorrespondenceCost(
correspondence_cost_cells()[ToFlatIndex(cell_index)]));
}
以上代码则是从grid 中取出对应坐标位置的占有概率。为何要存储free概率,而设置和获取均为hit概率,为何中间多一个转换步骤,反而是多此一举,其实前3节前端匹配已有体现,主要是匹配操作时采用类似最小二乘的优化思想,需要将最佳匹配值改为求取最小状态,因此采取free的概率进行匹配,则最小值则为最佳匹配。
probability grid地图更新
在占据栅格地图中,对于一个点,我们用p(s=0)来表示它是Free状态的概率,用p(s=1)来表示它是Occupied状态的概率,两者的和为1。我们希望一个栅格中仅有一个值,因此引入两者的比值来作为此cell的状态:![]()
对于一个cell,如果新观察到一个值z,由于z只能为1和0即要不hit,要不miss,然后根据观测值z我们需要更新它的状态。因此其观测的更新概率可以看做为p(s=1|z)和p(s=0|z)。即在当前观测z(占hit或misss)的情况下,一个栅格实际为hit的概率和miss的概率,即为条件概率。因此可以用贝叶斯公式进行求取,如下:

现在假设原来cell为odd(s), 而对应的更新odd则为
![]()
根据贝叶斯公式进行代入可获取如下公式:

如此可清晰看出更新后的cell应为
![]()
其中k-1为上一时刻的odds,而k为经过一次观测后的odds,显然仅是相差了C(z)这个系数。由于栅格表示是否为障碍物,观测采用激光测距是否障碍,显然仅有是(hit)和不是(miss)两种状态。其中系数为![]()
其中p(z|s=1)表示的是当cell为障碍时,即z=1,传感器认为是障碍的概率,显然是传感器本身属性决定的,因此为一常数。同样其他3种组合也均为常数,因此其系数C(z)是根据观测hit和miss决定的两个常数,即Cmiss 和Chit 两个常数。
简单总结:其更新过程可认为根据传感器观测的状态,对原cell的概率进行更新,假设原cell的值为value。当传感器测到此cell为hit时,则新的value_new=Chit * value; 如果传感器测的此cell为miss时,则新的value_new=Cmiss * value