tensorRT部署实战——yolov5
onnx优化
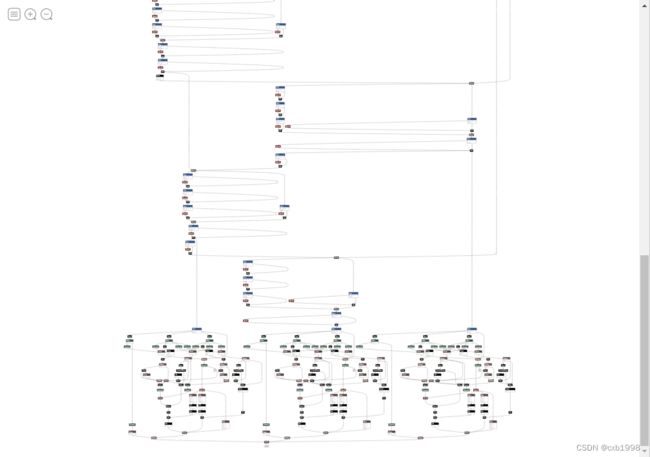
上来先贴onnx优化后的效果:
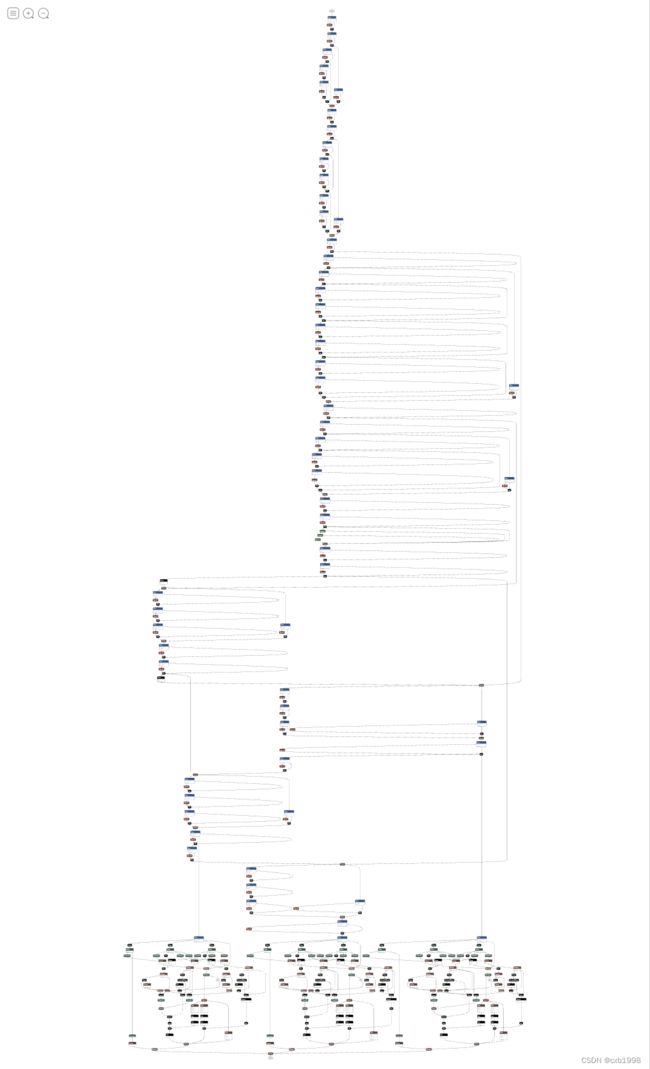

左图是yolov5s原模型导出的onnx,右图是经过优化后的onnx,效果是一致的,可以看到优化后简洁了 不少,最主要的是模型简化后,可以排除很多不必要的麻烦。
1. 首先是动态维度,前面说过通常只设定batch为动态维度,因此找到yolov5官方的onnx转化代码export.py,找到torch.onnx.export函数,进行修改。
torch.onnx.export(model, im, f, verbose=False, opset_version=opset,
training=torch.onnx.TrainingMode.TRAINING if train else torch.onnx.TrainingMode.EVAL,
do_constant_folding=not train,
input_names=['images'],
output_names=['output'],
dynamic_axes={'images': {0: 'batch', 2: 'height', 3: 'width'}, # shape(1,3,640,640)
'output': {0: 'batch', 1: 'anchors'} # shape(1,25200,85)
} if dynamic else None)dynamic_axes中image的height和width以及output的anchors都不设置动态,可以省去很多麻烦。
torch.onnx.export(model, im, f, verbose=False, opset_version=opset,
training=torch.onnx.TrainingMode.TRAINING if train else torch.onnx.TrainingMode.EVAL,
do_constant_folding=not train,
input_names=['images'],
output_names=['output'],
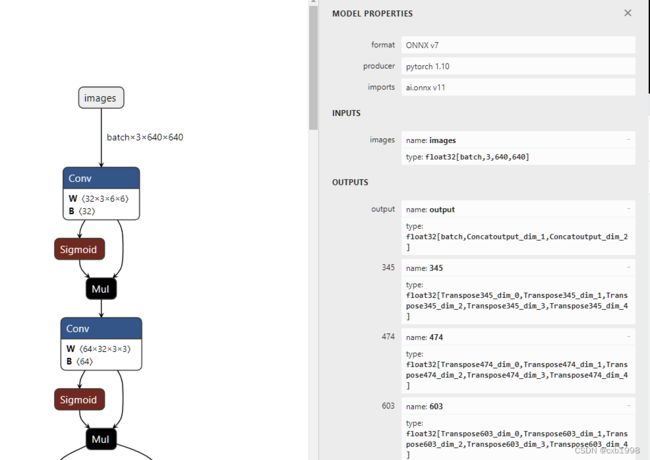
dynamic_axes={'images': {0: 'batch'}, # shape(1,3,640,640)
'output': {0: 'batch'} # shape(1,25200,85)
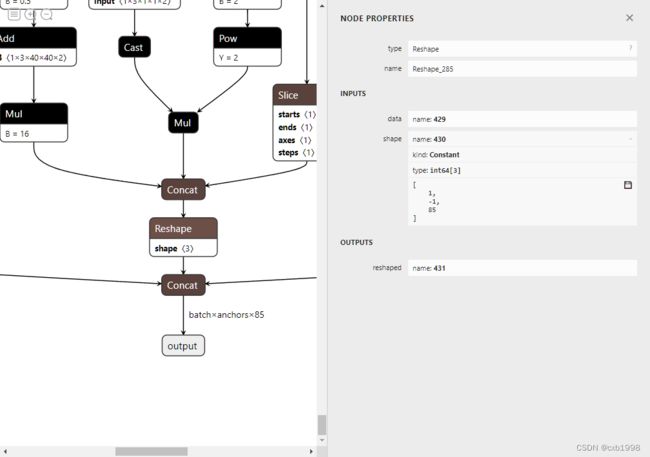
} if dynamic else None)这时候再导出,可以看到images的输入动态维度只有batch,但output仍然不对劲,因为output节点前还是引用了其他的shape关系,导致其输出是计算得到的,需要继续修改。
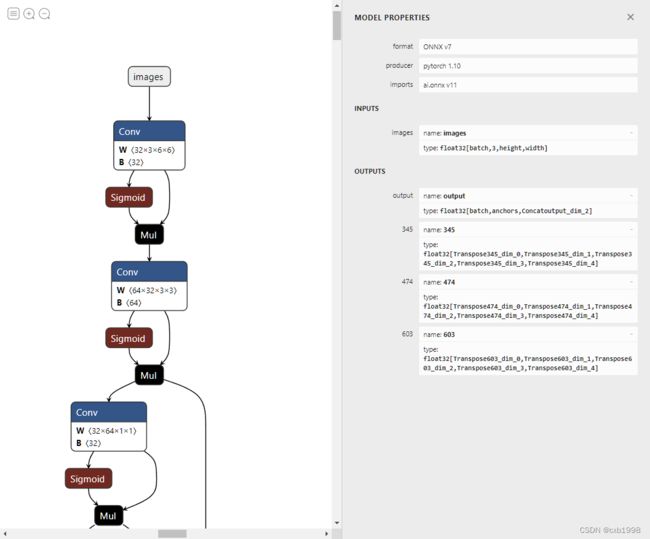
上图未修改,下图修改后。
2. output输出只需要一项即可,多余的三项可以省去。之所以多出来三项,是与yolo的训练代码有关,yolo为了适应不同尺度的目标检测,采用了FPN结构(特征金字塔结构),其返回了三个尺度的预测结果,在测试时不需要些单独层的预测,找到yolo.py中Detect类的forward函数,将输出曾进行修改。
return x if self.training else (torch.cat(z, 1), x)改为:
return torch.cat(z,1)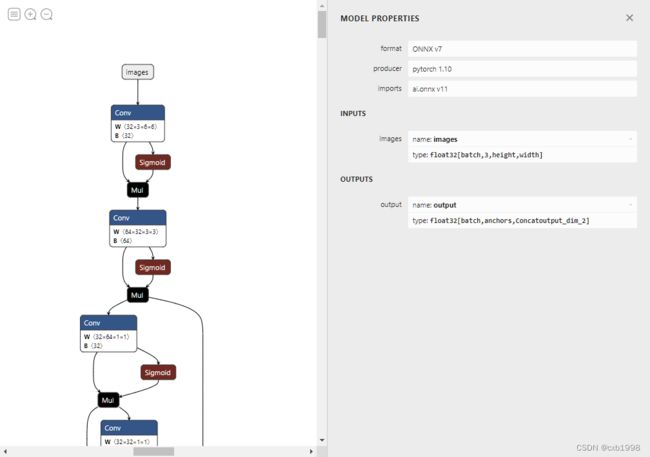
可以看到输出只剩下了一个,但此时onnx的整体仍然看起来很不简洁,是因为直接使用了.shape或者.size返回值,需要进一步修改。
3. 将.shape和.size的返回值经过int类型转换,可以防止很多问题出现,而且会简化模型,找到yolo.py中Detect类的forward函数,可以看到:
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()其中x[i].view的参数来源:
bs, _, ny, nx = x[i].shape直接用了shape的返回值,加上int后再导出:
bs, _, ny, nx = map(int,x[i].shape)
此时模型简洁了不少,但仍没有达到开头看的效果,另外可看到最后concat前的reshape中动态维度并不在batch维度中,需要进一步修改:
4.继续锁定forward函数:
def forward(self, x):
z = [] # inference output
for i in range(self.nl):
x[i] = self.m[i](x[i]) # conv
bs, _, ny, nx = map(int,x[i].shape) # x(bs,255,20,20) to x(bs,3,20,20,85)
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
if not self.training: # inference
if self.grid[i].shape[2:4] != x[i].shape[2:4] or self.onnx_dynamic:
self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
y = x[i].sigmoid()
if self.inplace:
y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
y = torch.cat((xy, wh, y[..., 4:]), -1)
z.append(y.view(bs, -1, self.no))
# return x if self.training else (torch.cat(z, 1), x)
return torch.cat(z,1)可以看到确实将-1置为中间维度了,因此先将bs=-1加入,改变其为动态维度,而中间维度通过计算得到:y与x[i]的shape一致,而x[i]的shape为bs,self.na,ny,nx,self.no,因此中间维度为self.na*ny*nx:
bs=-1
z.append(y.view(bs, self.na*ny*nx, self.no))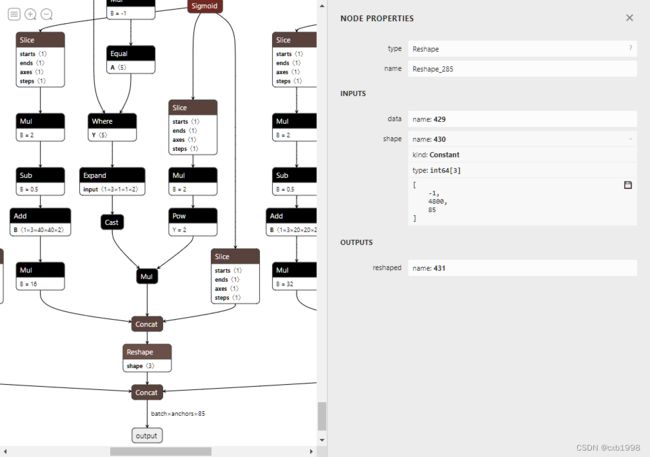
动态维度调整正确。最后我们看到expand、cast等等节点仍然没有达到预期的简介效果,原因是网络结构对anchor_grid的跟踪,而anchor_grid事实上可以直接确定值。
5. 简化expand等节点。
def _make_grid(self, nx=20, ny=20, i=0):
d = self.anchors[i].device
yv, xv = torch.meshgrid([torch.arange(ny).to(d), torch.arange(nx).to(d)])
grid = torch.stack((xv, yv), 2).expand((1, self.na, ny, nx, 2)).float()
anchor_grid = (self.anchors[i].clone() * self.stride[i]) \
.view((1, self.na, 1, 1, 2)).expand((1, self.na, ny, nx, 2)).float()
return grid, anchor_grid def forward(self, x):
z = [] # inference output
for i in range(self.nl):
x[i] = self.m[i](x[i]) # conv
bs, _, ny, nx = map(int,x[i].shape) # x(bs,255,20,20) to x(bs,3,20,20,85)
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
if not self.training: # inference
if self.grid[i].shape[2:4] != x[i].shape[2:4] or self.onnx_dynamic:
self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
y = x[i].sigmoid()
if self.inplace:
y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
y = torch.cat((xy, wh, y[..., 4:]), -1)
z.append(y.view(bs, -1, self.no))
# return x if self.training else (torch.cat(z, 1), x)
return torch.cat(z,1)self.anchor_grid改掉,并替换相应部分:
def forward(self, x):
z = [] # inference output
for i in range(self.nl):
x[i] = self.m[i](x[i]) # conv
bs, _, ny, nx = map(int,x[i].shape) # x(bs,255,20,20) to x(bs,3,20,20,85)
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
if not self.training: # inference
if self.grid[i].shape[2:4] != x[i].shape[2:4] or self.onnx_dynamic:
self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
anchor_grid = (self.anchors[i].clone() * self.stride[i]).view(1, -1, 1, 1, 2)
y = x[i].sigmoid()
if self.inplace:
y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * anchor_grid # wh
else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
wh = (y[..., 2:4] * 2) ** 2 * anchor_grid # wh
y = torch.cat((xy, wh, y[..., 4:]), -1)
bs=-1
z.append(y.view(bs, self.na*ny*nx, self.no))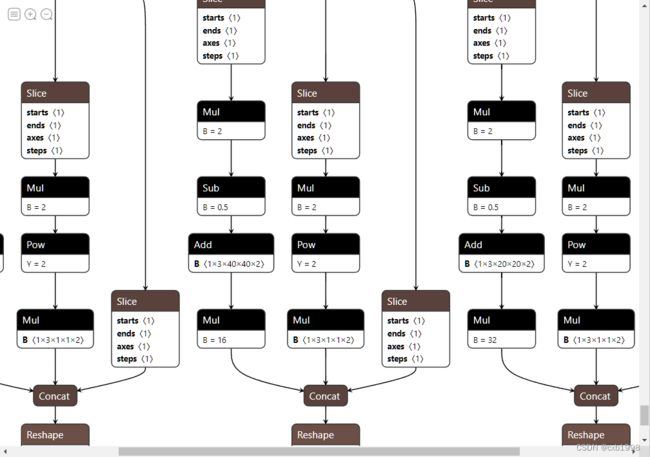
可以看到简化完成,我们尝试使用onnx-simplifier进行对比,发现后者的简化效果是十分不理想的。
trt编译推理
编译
trt模型的编译和分类器还是一致的,见文章tensorRT部署实战——分类器:
CSDN https://mp.csdn.net/mp_blog/creation/editor/126450140
https://mp.csdn.net/mp_blog/creation/editor/126450140
推理
void inference(){
TRTLogger logger;
auto engine_data = load_file("yolov5s.trtmodel");
auto runtime = make_nvshared(nvinfer1::createInferRuntime(logger));
auto engine = make_nvshared(runtime->deserializeCudaEngine(engine_data.data(), engine_data.size()));
if(engine == nullptr){
printf("Deserialize cuda engine failed.\n");
runtime->destroy();
return;
}
if(engine->getNbBindings() != 2){
printf("你的onnx导出有问题,必须是1个输入和1个输出,你这明显有:%d个输出.\n", engine->getNbBindings() - 1);
return;
}
cudaStream_t stream = nullptr;
checkRuntime(cudaStreamCreate(&stream));
auto execution_context = make_nvshared(engine->createExecutionContext());
int input_batch = 1;
int input_channel = 3;
int input_height = 640;
int input_width = 640;
int input_numel = input_batch * input_channel * input_height * input_width;
float* input_data_host = nullptr;
float* input_data_device = nullptr;
checkRuntime(cudaMallocHost(&input_data_host, input_numel * sizeof(float)));
checkRuntime(cudaMalloc(&input_data_device, input_numel * sizeof(float)));
///
// letter box
auto image = cv::imread("car.jpg");
// 通过双线性插值对图像进行resize
float scale_x = input_width / (float)image.cols;
float scale_y = input_height / (float)image.rows;
float scale = std::min(scale_x, scale_y);
float i2d[6], d2i[6];
// resize图像,源图像和目标图像几何中心的对齐
i2d[0] = scale; i2d[1] = 0; i2d[2] = (-scale * image.cols + input_width + scale - 1) * 0.5;
i2d[3] = 0; i2d[4] = scale; i2d[5] = (-scale * image.rows + input_height + scale - 1) * 0.5;
cv::Mat m2x3_i2d(2, 3, CV_32F, i2d); // image to dst(network), 2x3 matrix
cv::Mat m2x3_d2i(2, 3, CV_32F, d2i); // dst to image, 2x3 matrix
cv::invertAffineTransform(m2x3_i2d, m2x3_d2i); // 计算一个反仿射变换
cv::Mat input_image(input_height, input_width, CV_8UC3);
cv::warpAffine(image, input_image, m2x3_i2d, input_image.size(), cv::INTER_LINEAR, cv::BORDER_CONSTANT, cv::Scalar::all(114)); // 对图像做平移缩放旋转变换,可逆
cv::imwrite("input-image.jpg", input_image);
int image_area = input_image.cols * input_image.rows;
unsigned char* pimage = input_image.data;
float* phost_b = input_data_host + image_area * 0;
float* phost_g = input_data_host + image_area * 1;
float* phost_r = input_data_host + image_area * 2;
for(int i = 0; i < image_area; ++i, pimage += 3){
// 注意这里的顺序rgb调换了
*phost_r++ = pimage[0] / 255.0f;
*phost_g++ = pimage[1] / 255.0f;
*phost_b++ = pimage[2] / 255.0f;
}
///
checkRuntime(cudaMemcpyAsync(input_data_device, input_data_host, input_numel * sizeof(float), cudaMemcpyHostToDevice, stream));
// 3x3输入,对应3x3输出
auto output_dims = engine->getBindingDimensions(1);
int output_numbox = output_dims.d[1];
int output_numprob = output_dims.d[2];
int num_classes = output_numprob - 5;
int output_numel = input_batch * output_numbox * output_numprob;
float* output_data_host = nullptr;
float* output_data_device = nullptr;
checkRuntime(cudaMallocHost(&output_data_host, sizeof(float) * output_numel));
checkRuntime(cudaMalloc(&output_data_device, sizeof(float) * output_numel));
// 明确当前推理时,使用的数据输入大小
auto input_dims = engine->getBindingDimensions(0);
input_dims.d[0] = input_batch;
execution_context->setBindingDimensions(0, input_dims);
float* bindings[] = {input_data_device, output_data_device};
bool success = execution_context->enqueueV2((void**)bindings, stream, nullptr);
checkRuntime(cudaMemcpyAsync(output_data_host, output_data_device, sizeof(float) * output_numel, cudaMemcpyDeviceToHost, stream));
checkRuntime(cudaStreamSynchronize(stream));
// decode box:从不同尺度下的预测狂还原到原输入图上(包括:预测框,类被概率,置信度)
vector> bboxes;
float confidence_threshold = 0.25;
float nms_threshold = 0.5;
for(int i = 0; i < output_numbox; ++i){
float* ptr = output_data_host + i * output_numprob;
float objness = ptr[4];
if(objness < confidence_threshold)
continue;
float* pclass = ptr + 5;
int label = std::max_element(pclass, pclass + num_classes) - pclass;
float prob = pclass[label];
float confidence = prob * objness;
if(confidence < confidence_threshold)
continue;
// 中心点、宽、高
float cx = ptr[0];
float cy = ptr[1];
float width = ptr[2];
float height = ptr[3];
// 预测框
float left = cx - width * 0.5;
float top = cy - height * 0.5;
float right = cx + width * 0.5;
float bottom = cy + height * 0.5;
// 对应图上的位置
float image_base_left = d2i[0] * left + d2i[2];
float image_base_right = d2i[0] * right + d2i[2];
float image_base_top = d2i[0] * top + d2i[5];
float image_base_bottom = d2i[0] * bottom + d2i[5];
bboxes.push_back({image_base_left, image_base_top, image_base_right, image_base_bottom, (float)label, confidence});
}
printf("decoded bboxes.size = %d\n", bboxes.size());
// nms非极大抑制
std::sort(bboxes.begin(), bboxes.end(), [](vector& a, vector& b){return a[5] > b[5];});
std::vector remove_flags(bboxes.size());
std::vector> box_result;
box_result.reserve(bboxes.size());
auto iou = [](const vector& a, const vector& b){
float cross_left = std::max(a[0], b[0]);
float cross_top = std::max(a[1], b[1]);
float cross_right = std::min(a[2], b[2]);
float cross_bottom = std::min(a[3], b[3]);
float cross_area = std::max(0.0f, cross_right - cross_left) * std::max(0.0f, cross_bottom - cross_top);
float union_area = std::max(0.0f, a[2] - a[0]) * std::max(0.0f, a[3] - a[1])
+ std::max(0.0f, b[2] - b[0]) * std::max(0.0f, b[3] - b[1]) - cross_area;
if(cross_area == 0 || union_area == 0) return 0.0f;
return cross_area / union_area;
};
for(int i = 0; i < bboxes.size(); ++i){
if(remove_flags[i]) continue;
auto& ibox = bboxes[i];
box_result.emplace_back(ibox);
for(int j = i + 1; j < bboxes.size(); ++j){
if(remove_flags[j]) continue;
auto& jbox = bboxes[j];
if(ibox[4] == jbox[4]){
// class matched
if(iou(ibox, jbox) >= nms_threshold)
remove_flags[j] = true;
}
}
}
printf("box_result.size = %d\n", box_result.size());
for(int i = 0; i < box_result.size(); ++i){
auto& ibox = box_result[i];
float left = ibox[0];
float top = ibox[1];
float right = ibox[2];
float bottom = ibox[3];
int class_label = ibox[4];
float confidence = ibox[5];
cv::Scalar color;
tie(color[0], color[1], color[2]) = random_color(class_label);
cv::rectangle(image, cv::Point(left, top), cv::Point(right, bottom), color, 3);
auto name = cocolabels[class_label];
auto caption = cv::format("%s %.2f", name, confidence);
int text_width = cv::getTextSize(caption, 0, 1, 2, nullptr).width + 10;
cv::rectangle(image, cv::Point(left-3, top-33), cv::Point(left + text_width, top), color, -1);
cv::putText(image, caption, cv::Point(left, top-5), 0, 1, cv::Scalar::all(0), 2, 16);
}
cv::imwrite("image-draw.jpg", image);
checkRuntime(cudaStreamDestroy(stream));
checkRuntime(cudaFreeHost(input_data_host));
checkRuntime(cudaFreeHost(output_data_host));
checkRuntime(cudaFree(input_data_device));
checkRuntime(cudaFree(output_data_device));
} 分解:
1. 可以看到开始的步骤还是一样的:加载模型—>runtime实例—>反序列化得到engine—>创建流、执行上下文—>分配内存。
TRTLogger logger;
auto engine_data = load_file("yolov5s.trtmodel");
auto runtime = make_nvshared(nvinfer1::createInferRuntime(logger));
auto engine = make_nvshared(runtime->deserializeCudaEngine(engine_data.data(), engine_data.size()));
if(engine == nullptr){
printf("Deserialize cuda engine failed.\n");
runtime->destroy();
return;
}
if(engine->getNbBindings() != 2){
printf("你的onnx导出有问题,必须是1个输入和1个输出,你这明显有:%d个输出.\n", engine->getNbBindings() - 1);
return;
}
cudaStream_t stream = nullptr;
checkRuntime(cudaStreamCreate(&stream));
auto execution_context = make_nvshared(engine->createExecutionContext());
int input_batch = 1;
int input_channel = 3;
int input_height = 640;
int input_width = 640;
int input_numel = input_batch * input_channel * input_height * input_width;
float* input_data_host = nullptr;
float* input_data_device = nullptr;
checkRuntime(cudaMallocHost(&input_data_host, input_numel * sizeof(float)));
checkRuntime(cudaMalloc(&input_data_device, input_numel * sizeof(float)));2. 接下来是预处理,yolov5训练时采用了等比缩放、黑边填充的方式,因此推理端的输入需要先进性同样的预处理。
///
// letter box
auto image = cv::imread("car.jpg");
// 通过双线性插值对图像进行resize
float scale_x = input_width / (float)image.cols;
float scale_y = input_height / (float)image.rows;
float scale = std::min(scale_x, scale_y);
float i2d[6], d2i[6];
// resize图像,源图像和目标图像几何中心的对齐
i2d[0] = scale; i2d[1] = 0; i2d[2] = (-scale * image.cols + input_width + scale - 1) * 0.5;
i2d[3] = 0; i2d[4] = scale; i2d[5] = (-scale * image.rows + input_height + scale - 1) * 0.5;
cv::Mat m2x3_i2d(2, 3, CV_32F, i2d); // image to dst(network), 2x3 matrix
cv::Mat m2x3_d2i(2, 3, CV_32F, d2i); // dst to image, 2x3 matrix
cv::invertAffineTransform(m2x3_i2d, m2x3_d2i); // 计算一个反仿射变换
cv::Mat input_image(input_height, input_width, CV_8UC3);
cv::warpAffine(image, input_image, m2x3_i2d, input_image.size(), cv::INTER_LINEAR, cv::BORDER_CONSTANT, cv::Scalar::all(114)); // 对图像做平移缩放旋转变换,可逆
cv::imwrite("input-image.jpg", input_image);首先得到等比缩放比例scale,例如原图1920*1080,输入为640*640,那么scale_x=0.333,scale_y=0.593,缩放比例选择0.33,,即将最长边缩放到640,缩放后短边不足640的进行黑边填充。
i2d是img2dst的2*3矩阵,关于变换矩阵的确定,可以参照:
Warpaffine_cxb1998的博客-CSDN博客yolo预处理等比缩放黑边填充中的缩放平移https://blog.csdn.net/qq_41389330/article/details/126560472?spm=1001.2014.3001.5501其中
i2d[0] = scale; i2d[1] = 0; i2d[2] = (-scale * image.cols + input_width + scale - 1) * 0.5;
i2d[3] = 0; i2d[4] = scale; i2d[5] = (-scale * image.rows + input_height + scale - 1) * 0.5;为什么不是
i2d[0] = scale; i2d[1] = 0; i2d[2] = (-scale * image.cols + input_width) * 0.5;
i2d[3] = 0; i2d[4] = scale; i2d[5] = (-scale * image.rows + input_height) * 0.5;不是很清楚,但修改后差距也不大。
3. 得到仿射变换矩阵m2x3_i2d和仿射逆变换矩阵m2x3_d2i,并利用opencv进行warpaffine。
cv::Mat m2x3_i2d(2, 3, CV_32F, i2d); // image to dst(network), 2x3 matrix
cv::Mat m2x3_d2i(2, 3, CV_32F, d2i); // dst to image, 2x3 matrix
cv::invertAffineTransform(m2x3_i2d, m2x3_d2i); // 计算一个反仿射变换
cv::warpAffine(image, input_image, m2x3_i2d, input_image.size(), cv::INTER_LINEAR, cv::BORDER_CONSTANT, cv::Scalar::all(114)); // 对图像做平移缩放旋转变换,可逆
cv::imwrite("input-image.jpg", input_image);4. 预处理的另一部分,BGR转RGB并归一化,不过这里没有进行标准化,原理在分类器中已经详细介绍。
int image_area = input_image.cols * input_image.rows;
unsigned char* pimage = input_image.data;
float* phost_b = input_data_host + image_area * 0;
float* phost_g = input_data_host + image_area * 1;
float* phost_r = input_data_host + image_area * 2;
for(int i = 0; i < image_area; ++i, pimage += 3){
// 注意这里的顺序rgb调换了
*phost_r++ = pimage[0] / 255.0f;
*phost_g++ = pimage[1] / 255.0f;
*phost_b++ = pimage[2] / 255.0f;
}5. 确定内存大小并分配
// 3x3输入,对应3x3输出
auto output_dims = engine->getBindingDimensions(1);
int output_numbox = output_dims.d[1];
int output_numprob = output_dims.d[2];
int num_classes = output_numprob - 5;
int output_numel = input_batch * output_numbox * output_numprob;
float* output_data_host = nullptr;
float* output_data_device = nullptr;
checkRuntime(cudaMallocHost(&output_data_host, sizeof(float) * output_numel));
checkRuntime(cudaMalloc(&output_data_device, sizeof(float) * output_numel));6. 执行推理并将数据搬运回host
// 明确当前推理时,使用的数据输入大小
auto input_dims = engine->getBindingDimensions(0);
input_dims.d[0] = input_batch;
execution_context->setBindingDimensions(0, input_dims);
float* bindings[] = {input_data_device, output_data_device};
bool success = execution_context->enqueueV2((void**)bindings, stream, nullptr);
checkRuntime(cudaMemcpyAsync(output_data_host, output_data_device, sizeof(float) * output_numel, cudaMemcpyDeviceToHost, stream));
checkRuntime(cudaStreamSynchronize(stream));7. 此时output_data_host中的形式已经和之前的文章NMS里的输入一致,可以回顾:
NMS(非极大值抑制)的python,cpu,gpu实现_cxb1998的博客-CSDN博客NMS(非极大值抑制)是目标检测中用来确定最佳检测框的手段,根据目标检测流程,若果没有NMS步骤,其每个检测框都会有大量重叠度很高的预测框表示同一个目标。如下图:左图为经过NMS的预测结果,右图为未经过NMS的结果,很明显,左图才是我们需要的结果。.........https://blog.csdn.net/qq_41389330/article/details/126165954?spm=1001.2014.3001.5502
后处理将预测框映射回原图上:
// decode box:从不同尺度下的预测狂还原到原输入图上(包括:预测框,类被概率,置信度)
vector> bboxes;
float confidence_threshold = 0.25;
float nms_threshold = 0.5;
for(int i = 0; i < output_numbox; ++i){
float* ptr = output_data_host + i * output_numprob;
float objness = ptr[4];
if(objness < confidence_threshold)
continue;
float* pclass = ptr + 5;
int label = std::max_element(pclass, pclass + num_classes) - pclass;
float prob = pclass[label];
float confidence = prob * objness;
if(confidence < confidence_threshold)
continue;
// 中心点、宽、高
float cx = ptr[0];
float cy = ptr[1];
float width = ptr[2];
float height = ptr[3];
// 预测框
float left = cx - width * 0.5;
float top = cy - height * 0.5;
float right = cx + width * 0.5;
float bottom = cy + height * 0.5;
// 对应图上的位置
float image_base_left = d2i[0] * left + d2i[2];
float image_base_right = d2i[0] * right + d2i[2];
float image_base_top = d2i[0] * top + d2i[5];
float image_base_bottom = d2i[0] * bottom + d2i[5];
bboxes.push_back({image_base_left, image_base_top, image_base_right, image_base_bottom, (float)label, confidence});
}
printf("decoded bboxes.size = %d\n", bboxes.size()); 流程为:
设置置信度阈值0.25用于滤除置信度过低的框,设置nms阈值进行非极大值抑制;
for循环对每个框进行操作,提取每个框的置信度,低于置信度阈值的直接略过节省时间;
找到框类别概率最大的类作为该框代表的label,并获取该概率值和置信度再相乘作进一步置信度滤除;
获得中心点、宽、高转化为框的左上和右下坐标,并通过之前计算的反仿射矩阵将框映射回原图中。
8. 后处理的下一部分就是进行NMS非极大值抑制,这在之前的文章中详细介绍过,并对其python实现,cpu实现和gpu实现都进行了详细的介绍:
https://blog.csdn.net/qq_41389330/article/details/126165954?spm=1001.2014.3001.5502https://blog.csdn.net/qq_41389330/article/details/126165954?spm=1001.2014.3001.5502这里为cpu版本,注意bboxes已经变成image_base_left, image_base_top, image_base_right, image_base_bottom, (float)label, confidence的形式:
// nms非极大抑制
std::sort(bboxes.begin(), bboxes.end(), [](vector& a, vector& b){return a[5] > b[5];});
std::vector remove_flags(bboxes.size());
std::vector> box_result;
box_result.reserve(bboxes.size());
auto iou = [](const vector& a, const vector& b){
float cross_left = std::max(a[0], b[0]);
float cross_top = std::max(a[1], b[1]);
float cross_right = std::min(a[2], b[2]);
float cross_bottom = std::min(a[3], b[3]);
float cross_area = std::max(0.0f, cross_right - cross_left) * std::max(0.0f, cross_bottom - cross_top);
float union_area = std::max(0.0f, a[2] - a[0]) * std::max(0.0f, a[3] - a[1])
+ std::max(0.0f, b[2] - b[0]) * std::max(0.0f, b[3] - b[1]) - cross_area;
if(cross_area == 0 || union_area == 0) return 0.0f;
return cross_area / union_area;
};
for(int i = 0; i < bboxes.size(); ++i){
if(remove_flags[i]) continue;
auto& ibox = bboxes[i];
box_result.emplace_back(ibox);
for(int j = i + 1; j < bboxes.size(); ++j){
if(remove_flags[j]) continue;
auto& jbox = bboxes[j];
if(ibox[4] == jbox[4]){
// class matched
if(iou(ibox, jbox) >= nms_threshold)
remove_flags[j] = true;
}
}
}
printf("box_result.size = %d\n", box_result.size()); 流程:
首先对框进行排序,排序规则是置信度由高到低;
定义remove_flags用来标记哪些框是要被滤除掉的,哪些框是要留下的(效率);
for对每个框进行操作,若当前框标记为保留,则与后续框进行比较,比较对象是与当前框类别相同的框,比较内容是iou交并比,若交并比大于某个阈值,则后续框被打上去除的标记,这样就能保证留下了该类别该位置基本只有一个框。
9.最后是在原图上将框画出来:
for(int i = 0; i < box_result.size(); ++i){
auto& ibox = box_result[i];
float left = ibox[0];
float top = ibox[1];
float right = ibox[2];
float bottom = ibox[3];
int class_label = ibox[4];
float confidence = ibox[5];
cv::Scalar color;
tie(color[0], color[1], color[2]) = random_color(class_label);
cv::rectangle(image, cv::Point(left, top), cv::Point(right, bottom), color, 3);
auto name = cocolabels[class_label];
auto caption = cv::format("%s %.2f", name, confidence);
int text_width = cv::getTextSize(caption, 0, 1, 2, nullptr).width + 10;
cv::rectangle(image, cv::Point(left-3, top-33), cv::Point(left + text_width, top), color, -1);
cv::putText(image, caption, cv::Point(left, top-5), 0, 1, cv::Scalar::all(0), 2, 16);
}
cv::imwrite("image-draw.jpg", image);根据类别赋予随机颜色,通过rectangle和putText画框以及写类别和概率的文本信息。
最后是效果图:

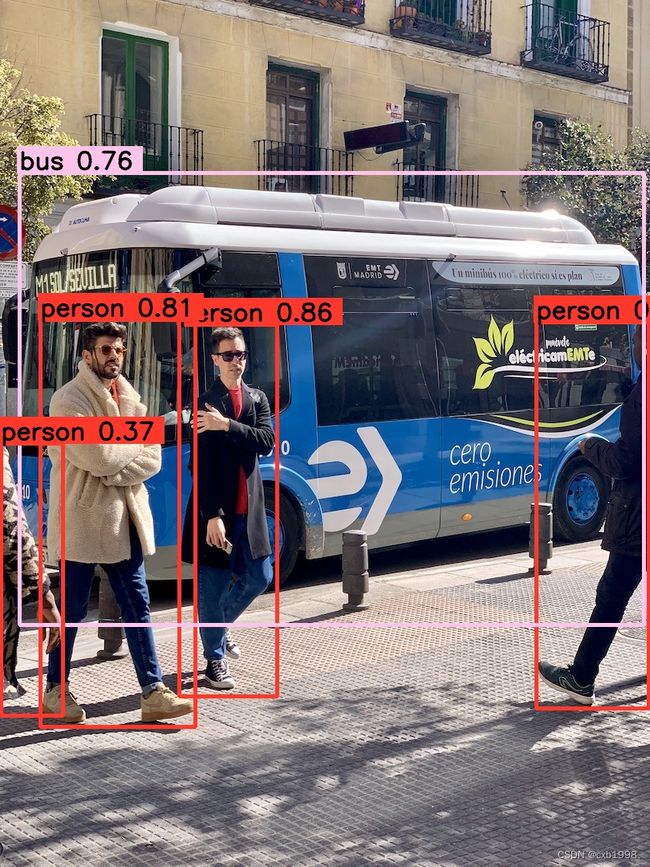
左图是onnx在推理效果,右图是trt推理效果,可以看到基本大差不差。