Tesla AI day 2022 - Optimus 浅析
错过了Tesla AI day 2022的直播,晚上先补了一下机器人的部分。AI day之前,我非常期待擎天柱的部分,因为2021的AI day马斯克已经把牛吹出来了,加上FSD感知能力很强,所以我预期这次2022 AI day,Tesla能展示擎天柱实现多模态的具体任务(视觉、语言、控制协同任务),比如人类对机器人说把那本书拿来给我,机器人能在环境中找到书并顺利交给人类。不过看完2022 AI day,我过于乐观的估计又被拉到现实。
1. 信心不足
马斯克的团队对于这次展示显然是信心不足的,主要有这几个表现:
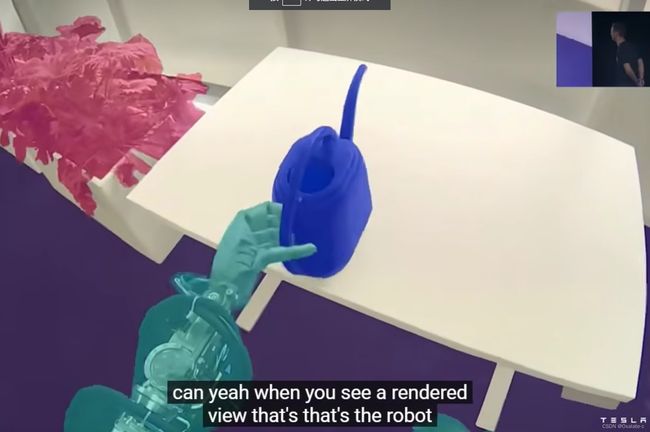
(1)整体的展示以视频展示为主,而且视频中的demo甚至主要是仿真展示。如
视觉分割
深度估计
行走

当然这几个感知出的效果还是很不错的,毕竟在自动驾驶任务上,相关技术有丰富的积累。
(2)视频中的实物展示是基本功能分开展示的,如上身的功能单独展示,不动腿部。
行走的功能单独展示,没有上肢。
(3)现场的机器人展示有两段:(1)机器人各个主要关节协同动作的展示,这块比视频演示要进步不少,可能是最近赶出来的。机器人行走过程中,可以看出机器人有高频的小幅抖动,控制还调的不够好。能看出马斯克非常紧张,因为在机器人下场过程中马斯克一直目送机器人直至其站稳,身旁的女工程师甚至都觉得冷场了几十秒有点尴尬了。(2)第二次展示直接给机器人装了壳子,由几个工作人员抬上来,主要做静态展示了。


(4)整个技术链路的介绍分了很多小块,有些技术人员甚至只介绍了2分钟就结束了,显得整个介绍过程的逻辑并不流畅,有些技术部分有些太过于初步,不太必要拿出来讲。这块的原因可能是这些分块技术都还在各自调试中,并没有形成全链路联调,也缺少完整的自顶向下的梳理。
2. 难点分析
通过1-2年的时间,把这样一个200+自由度、20+主自由度的机器人原型做出来已经实属不易,我个人对Tesla最后能做出惊艳的作品还是有信心的,只是这个过程可能更长。Tesla希望将自动驾驶上积累的软硬件及平台能力快速迁移到机器人上,技术上无疑是困难的,究其原因在于通用的人工智能对于我们还太过遥远。现有的机器人应用非常依赖于场景的定义,FSD还是结构化道路的车辆驾驶问题,擎天柱却是室内机器人,任务类型会更广泛,更模糊。这两个任务从感知能力、沟通能力、语义级决策控制上的设计逻辑都有明显差异。当前阶段只可能迁移单点功能。
3. 亮点
当然2022 AI day,还是有几个令人印象深刻的部分:
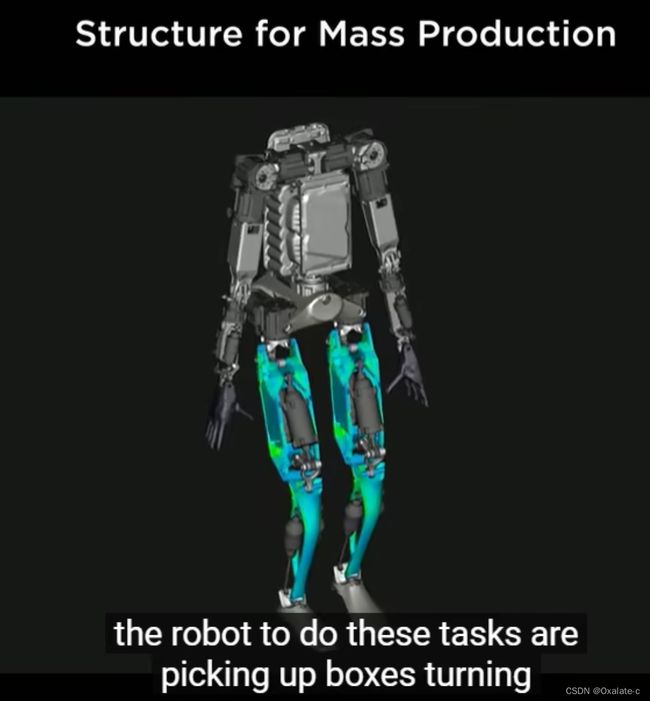
(1)机械结构。结构上,擎天柱的设计力求和人类贴近,28个主要自由度,膝盖、手等关键部位的设计决定了这款机器人是有丰富的想象空间的。

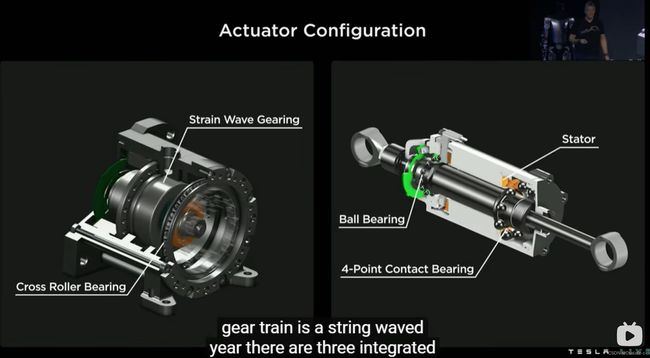
(2) 执行机构。Tesla自己搞执行结构了,这对于做一款高性能的机器人至关重要,因为机器人对于体积、质量、功率都有非常严格的要求,通用的电机可能无法满足定制化需求。电机这块是自己做的。电机能拉起来钢琴,手能拉20磅。最重要的难点之一看上去已经基本搞定了。

(3)3D occupancy。这个工作要呼应于Tesla前段时间披露的在自动驾驶上用3D occupancy map来做碰撞检测,当时我觉得非常纳闷,这个技术好像不太适合自动驾驶:一是自动驾驶并不依赖3D map,2D的占据信息就够了;二是只用这样的map作为碰撞检测的依据,动态环境里的态势的信息就丢了。但是今天看到机器人上复用了这个技术,就觉得顺理成章了,这个3D occupancy应该主要就是给擎天柱用的,准静态环境,而且是人形机器人,的确需要这样的碰撞信息。
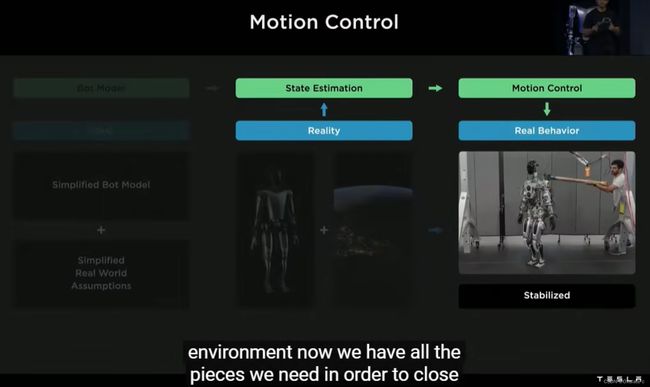
(4)仿真。和自动驾驶一样,机器人部分Tesla依然强调了它的端到端仿真的能力,我个人也觉得非常重要,想把一个机器人任务做到极致,只有大数据是不行的,必须要在反复交互中来进行学习,高保真仿真器 + 强化学习,可能是这个领域最后厮杀的战场。虽然这个仿真器的演示还只停留在ppt级别,但是可以看出Tesla的整体布局。
4. 写在最后:
我看不少网友在拿擎天柱和波士顿动力比,我个人觉得没有必要,毕竟应用场景不一样(军用 vs 民用)。擎天柱在运动能力上没有必要达到波士顿动力的程度,它更强调智能,运动能力只需要满足它完成相应的任务即可,根本不需要会翻跟头这类的动作,毕竟过于冗余的运动能力会带来成本的数倍增加。
也有人拿擎天柱和国内的某些人形机器人比,这的确能看出我国相较于国际领先水平的差距。机器人的基本能力取决于:机械、执行器(电机)、制造精度,说实话我国的人形机器人的差距不是某家公司造成的,而是受限于国内整体的制造业水平。试想如果同扭矩、同功率的国产电机要比进口电机体积大数倍,那么机器人的精巧、紧凑就做不到。如果国内机械加工的误差达不到国际先进,那么结构中的死区等因素就会对整个机器人系统的控制带来极大挑战,动作就难以顺滑。技术尚未成熟,我辈尚需努力,希望我国也能有世界领先的人形机器人,也希望一个高度智能的未来世界早日到来。