在ROS下使用Cartographer的纯定位模式,并实时获取定位位姿数据
文章目录
- 前言
- 一、Cartographer纯定位模式的配置
-
- 1.启动纯定位模式配置
- 2.加载定位地图,并删除cartographer生成地图节点
- 二、实时获取定位数据
-
- 1.新建一个节点发布定位数据
- 2.修改makelist文件并编译
- 3.启动仿真环境并启动节点
- 总结
前言
Cartographer提供了一种纯定位模式,在实际工程中有很多应用。本文记录在Gazebo仿真环境下,使用turtlebot3在cartographer的纯定位模式下,发布实时定位数据的过程。
一、Cartographer纯定位模式的配置
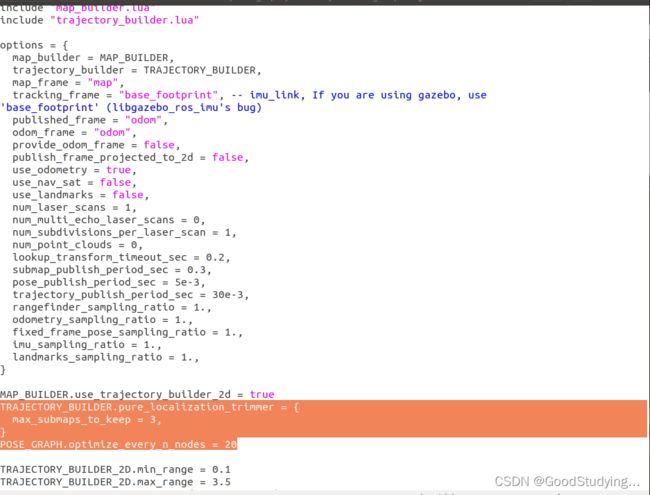
1.启动纯定位模式配置
修改你的.lua文件,添加以下橙色内容颜色显示内容。
2.加载定位地图,并删除cartographer生成地图节点
在你的.launch文件中添加map_server 节点,并删除cartographer_occupancy_grid_node节点,如下
二、实时获取定位数据
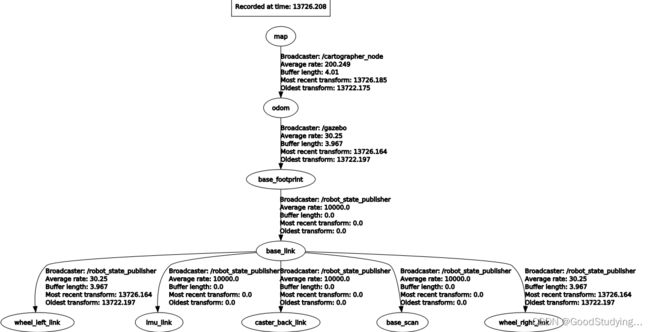
cartographer纯定位模式下获取定位数据,就是获取map坐标到base_link的tf。
1.新建一个节点发布定位数据
在你的工作区间的软件包的src文件夹下添加一个CartoTransferPose_main.cc文件,内容如下。
#include
#include
#include
#include
#include
#include
using namespace std;
double x,y,z, qx,qy,qz, qw;
double theta;
geometry_msgs::Pose2D pos_now;
int main(int argc, char** argv){
ros::init(argc, argv, "tf_Pose_Publisher");
ros::NodeHandle node;
ros::Publisher _pose_pub=node.advertise("pose_data", 10);
tf::StampedTransform transform;
tf::TransformListener listener;
ros::Rate rate(10.0);
while (ros::ok()){
ros::Time start = ros::Time::now();
cout << "StartTime:"<< start << endl;
tf::StampedTransform transform;
try{
//得到坐map和坐标base_link之间的关系
listener.waitForTransform("map","base_link", ros::Time(0), ros::Duration(3.0));
listener.lookupTransform("map", "base_link", ros::Time(0), transform);
}
catch (tf::TransformException &ex) {
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
}
x=transform.getOrigin().x();
y=transform.getOrigin().y();
z=transform.getOrigin().z();
tf::Quaternion q = transform.getRotation();
qx = q.x();
qy = q.y();
qz = q.z();
qw = q.w();
pos_now.x = transform.getOrigin().x();
pos_now.y =transform.getOrigin().y();
pos_now.theta = tf::getYaw(q);
_pose_pub.publish(pos_now);
printf("x: %f, y: %f, z: %f, qx: %f,qy: %f,qz: %f, qw: %f, theta: %f\n",x,y,z,qx,qy,qz,qw,pos_now.theta);
rate.sleep();
ros::Time end = ros::Time::now();
cout << "EndTime:"< 2.修改makelist文件并编译
添加以下代码到Cmakelist文件
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
tf
)
add_executable(CartoTransferPose_main src/CartoTransferPose_main.cc)
target_link_libraries(CartoTransferPose_main ${catkin_LIBRARIES})
保存并编译。
3.启动仿真环境并启动节点
首先打开gazebo环境并按之前修改配置启动纯定位模式。
在命令行输入rostopic echo /pose_data。 这里发布的即位姿数据。

在命令行用rosrun启动CartoTransferPose_main节点,出现以下界面。其中x,y,theta即为位姿数据,频率为10hz。

总结
本文配置了Cartographer的纯定位模式,并获取了定位数据,为后续应用做好了铺垫。