LIO论文阅读:Tightly Coupled 3D Lidar Inertial Odometry and Mapping
论文地址与代码地址
论文:arxiv
代码:GitHub
摘要
Ego-motion 在移动机器人应用中很重要。传感器融合可以补偿单传感器缺陷。这篇文章主要介绍了一种LiDAR-IMU 融合的方法,通过联合优化IMU和LiDAR的测量数据,可以做到在LiDAR退化的情况下也没有明显漂移。
另外,本文提出了一种rotation-constrained refinement 算法(LIO-mapping),用于配准LiDAR位姿和全局地图。
实验结果显示,所提出的方法可以做到以IMU的速率估计传感器的位置,即使在快速移动和缺少特征情况下也能工作。
I. INTRODUCTION
LiDAR优点:在机器人领域广泛应用,频率10Hz,水平的 field of view(FOV)是360 ° \degree °。受光照影响小,高精度和高可靠性。
LiDAR的缺点:竖直方向上分辨率太小,太过于稀疏,因此能提供的特征也很少,让特征跟踪变得棘手。
安装在机器人上的LiDAR由于机器人的运动,会使测量的数据变差。
另外,在一个狭窄的走廊环境中,只能得到部分天花板,墙和底板的点云。特征过少导致跟踪的丢失。
还有一个问题:更新频率太低。
在本文中,提出IMU-LiDAR紧耦合的位姿估计算法来解决上述问题。
使用了 fix-lag smoothing 和 原有位姿边缘化的方法达到实时和一致性的估计,然后再进行 rotation-constrained refinement。
主要工作如下:
- LiDAR-IMU紧耦合算法提供高频的,实时的,准确的位姿估计。
- rotational constrained refinement 方法优化最终的位姿并且产生点云地图,提高一致性和鲁棒性的估计。
- 算法在室内外环境都进行了测试,效果比松耦合算法优异。
- 算法开源,业界第一个LiDAR-IMU紧耦合算法。
本文总体结构:
II 介绍相关工作;
III 介绍标记与注记;
IV 介绍里程计算法;
V 介绍 refinement (配准)算法;
VI 和 VII 介绍了实现与测试结果;
VIII 结论。
II. RELATED WORKS
松耦合算法:将LiDAR和IMU的状态估计分别单独考虑。
[1] 中的雷达里程计算法带有IMU的辅助信息。使用加速度信息时会假设它是 zero velocity 的。它将 IMU 和雷达的数据分离,并且将IMU信息作为整个系统的先验,因此在优化中,它没有最大化 IMU 信息的利用。
[2] 中使用EKF来融合2D 情况下的 LiDAR 和 IMU 的信息,但它不能处理3D或者更复杂的环境。
[3] 讲了一种模块化的IMU融合方式,通过 EKF 进行融合。这种松耦合的方式虽然计算效率很高,但是和紧耦合的相比准确度不够,因为它只把里程计作为一个黑盒,却没有通过IMU来更新它。
[4]采用了紧耦合的方式。
[5] 是 Soloviev 等人提出的。针对2D平面运动估计,他们提出了一种方法:抽取和匹配2D平面的线特征。通过 IMU 的预测方位补偿雷达信息。过程中应用了 卡尔曼滤波器。
[6] Hemann 等人提出了以误差状态的卡尔曼滤波器形式,紧耦合IMU 传播误差和 LiDAR heightmap。这种方式在环境地图已知时,没有GPS信息也能长时间工作,但没有地图无法工作。
[7] 和 [8] 未处理数据和 IMU 的预测数据直接用于计算残差和进行优化。这种方式没有牵涉转化和状态估计,在系统快速运动时,系统会不可用。
受到其他 VI 方式启发,如[10] ,[11] ,我们基于预积分和紧耦合的方式设计了整个系统。使用未处理的IMU数据和LiDAR数据进行状态优化。
整个系统可以在雷达退化或者运动十分快速时也能工作得很好。
据我们所知,我们的系统是少数几个适合复杂3D环境的。
III. NOTATIONS AND PRELIMINARIES
A. Notations
雷达每一线的测量记为 s c a n C scan \ C scan C。
包含所有 s c a n scan scan 的一次测量记为 s w e e p S sweep \ S sweep S。16线雷达在一次sweep中包含16个scan。
变换矩阵 T b a ∈ S E ( 3 ) \bold{T}_{b}^{a} \in SE(3) Tba∈SE(3),表示把点 x b ∈ R 3 \bold{x^b} \in \mathbb{R^3} xb∈R3 从坐标系 F b F_b Fb 变换到坐标系 F a F_a Fa;
T ˉ b a \bold{\bar{T}}_{b}^{a} Tˉba表示IMU预测的变换;
R b a ∈ S O ( 3 ) \bold{R}_b^a \in SO(3) Rba∈SO(3) 和 p b a \bold{p}_b^a pba 分别是 T b a \bold{T}_{b}^{a} Tba的旋转和平移部分;
四元素 q b a \bold{q}_b^a qba对应于 R b a \bold{R}_b^a Rba;
a ^ k \bold{\hat{a}}_k a^k和 ω ^ k \bold{\hat{\omega}}_k ω^k表示在时刻 k k k 时,IMU的加速度和角速度测量;
在坐标系 F a F_a Fa下抽取的特征表示为 F a \bold{F}_a Fa, F a \bold{F}_a Fa可以通过 F a b \bold{F}_a^b Fab变换到坐标系 F b {F}_b Fb。
A. IMU Dynamics
1)状态
F B i F_{B_i} FBi 和 F L i F_{L_i} FLi 分别是IMU和雷达的坐标系;
雷达在离散时刻 i i i 时接收 s w e e p S i sweep\ S_i sweep Si;
我们要进行估计的是IMU在世界坐标系下 F W F^W FW 的状态 X B i W \bold{X}_{B_i}^W XBiW以及雷达和IMU之间的外参 T B L \bold{T}_B^L TBL,具体如下:
X B i W = [ p B i W T v B i W T q a i W T b g i W T ] T , T B L = [ p B L T q B L T ] (1) \bold{X}_{B_i}^W=[ {\bold{p}_{B_i}^W}^T \ {\bold{v}_{B_i}^W}^T \ {\bold{q}_{a_i}^W}^T \ {\bold{b}_{g_i}^W}^T ]^T, \\ \bold{T}_B^L=[{\bold{p}_{B}^L}^T \ {\bold{q}_{B}^L}^T] \tag{1} XBiW=[pBiWT vBiWT qaiWT bgiWT]T,TBL=[pBLT qBLT](1)
上面的公式中:
p B i W {\bold{p}_{B_i}^W} pBiW 是当前body frame相对于世界坐标系的位置;
v B i W {\bold{v}_{B_i}^W} vBiW 是当前body frame相对于世界坐标系的速度;
q B i W {\bold{q}_{B_i}^W} qBiW 是当前body frame相对于世界坐标系的姿态;
b a \bold{b}_a ba是IMU的加速度偏置;
b g \bold{b}_g bg是IMU的角速度偏置;
2)动态模型
输入:IMU的加速度和角速度;
输出: X B k W {\bold{X}_{B_k}^W} XBkW,将 X B i W {\bold{X}_{B_i}^W} XBiW 更新到 X B j W {\bold{X}_{B_j}^W} XBjW ;
更新方程如下:
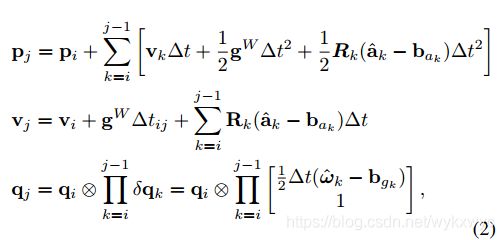
方程内:
Δ t \Delta t Δt是两次IMU连续测量的时间间隔;
我们积分的时间区间是两次雷达扫描之间的时间;
g W \bold{g}^W gW是世界坐标系下的重力;
简写:
( ⋅ ) i = ˙ ( ⋅ ) B i W (\cdot)_i \dot{=}(\cdot)^W_{B_i} (⋅)i=˙(⋅)BiW,
Δ t i j = Σ k = i j − 1 Δ t \Delta t_{ij}=\Sigma ^{j-1}_{k=i}{\Delta t} Δtij=Σk=ij−1Δt ,
∏ k = i j − i \prod_{k=i}^{j-i} ∏k=ij−i是四元素的连乘;
3)预积分
在时刻 i i i 到时刻 j j j 之间,body frame 的运动可以通过预积分得到:
z j i = { Δ p i j , Δ v i j , Δ q i j } z_j^i=\{\Delta \bold{p}_{ij},\Delta \bold{v}_{ij},\Delta \bold{q}_{ij}\} zji={Δpij,Δvij,Δqij}
z j i z^i_j zji具有协方差 C B j B i \bold{C}^{B_i}_{B_j} CBjBi
这部分参考补充材料。
IV. TIGHTLY COUPLED LIDAR-IMU ODOMETRY
受到[7],[1],[3]的启发,他们将里程计和建图两部分分开。
本文也分成两个部分:
Sec. IV介绍紧耦合的lidar-IMU里程计,在局部窗口中优化所有的状态;
Sec. V介绍rotation constrained refinement 过程,这是一个全局建图过程。
A. Lidar-IMU Odometry Overview
lidar-IMU里程计系统整体框图:
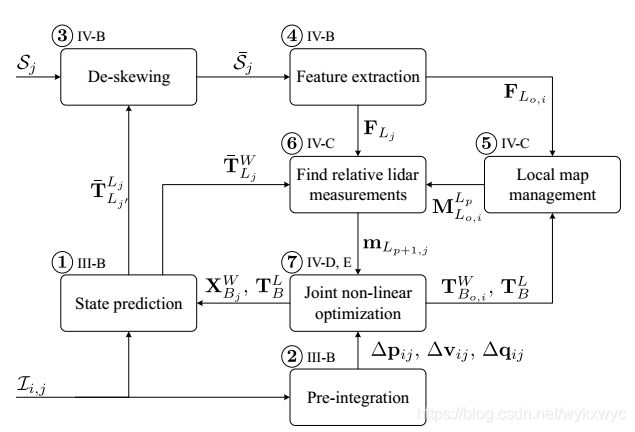
输入是 lidar raw inputs S j S_j Sj 和 IMU raw inputs I i , j I_{i,j} Ii,j
步骤:
1)在 S j S_j Sj 接收到之前,IMU状态通过公式-2进行迭代;
2)同时预积分得到 Δ p i j , Δ v i j , Δ q i j \Delta \bold{p}_{ij},\Delta \bold{v}_{ij},\Delta \bold{q}_{ij} Δpij,Δvij,Δqij;
3)接收到 S j S_j Sj 后,进行校正,然后得到 S ˉ j \bar{S}_j Sˉj;
4)进行特征抽取,给数据降维,得到最重要的特征点 F L j \bold{F}_{L_j} FLj;
5)上一次雷达特征点 F L o , i \bold{F}_{L_{o,i}} FLo,i 根据上一次的对应优化状态 T b o , i W \bold{T}^W_{b_{o,i}} Tbo,iW 和 T B L \bold{T}^L_B TBL,得到一个 local map M L o , i L p \bold{M}^{L_{p}}_{L_o,i{}} MLo,iLp;
6)根据对 F j \bold{F}_j Fj时的 lidar pose 的预测,得到 lidar 的性对测量 m L p + 1 , j \bold{m}_{L_{p+1,j}} mLp+1,j;
7)联合优化,根据雷达得到的两帧之间的相对变换和IMU的预积分进行最大后验估计,估计的结果再去更新1)中 IMU 状态,避免 drift。
B. De-skewing and Feature Extraction
这一部分对应上面总体框图的步骤3,步骤4。
3D雷达在运动时得到的数据会有失真,解决方法如下:
1.使用和LOAM中类似的方法,假设了雷达的匀速运动模型。
2.然后从IMU状态中预测出 T ˉ L j ′ L j \bold{\bar{T}}^{L_j}_{L_{j'}} TˉLj′Lj。
3.对于每个点 x ( t ) ∈ S j ⊂ R 3 \bold{x}(t) \in S_j \subset \mathbb{R}^3 x(t)∈Sj⊂R3,通过 T ˉ L j ′ L j \bold{\bar{T}}^{L_j}_{L_{j'}} TˉLj′Lj 线性插补,进行位姿校正并转换坐标系到 ending pose of the sweep,得到 S ˉ j \bar{S}_j Sˉj。
4.这一 sweep 中的时间戳 t ∈ ( t j ′ , t j ] t \in (t_{j'},t_j] t∈(tj′,tj], t j ′ t_{j'} tj′ 是 sweep 的开始, t j t_{j} tj 是 sweep 的结束。
使用与LOAM中相同的提取特征边和特征平面的方法提高计算效率。
F L j ∈ S ˉ j \bold{F}_{L_j} \in \bar{S}_j FLj∈Sˉj通过曲率进行选择,选择最平的和最陡的。
C. Relative Lidar Measurements
这一部分对应上面总体框图的步骤5,步骤6。
为了和IMU预积分相适应,对于 lidar 数据采用 sweep 之间的相对位姿运动。算法如下面框图所示:

因为单个 sweep 不够稠密,计算准确的特征对应很困难,所以需要先建立一个local map。
local map包含 N m N_m Nm 个离散的时刻:
{ o , . . . , p , . . . , i } \{o,...,p,...,i\} {o,...,p,...,i}
如下图所示,

o o o 是第一个lidar sweep;
p p p 是 pivot lidar sweep;
i i i 是最后一个 lidar sweep;
local map M L o , i L p \bold{M}^{L_{p}}_{L_o,i{}} MLo,iLp 采用 F L γ L p \bold{F}^{L_{p}}_{L_{\gamma}} FLγLp , γ ∈ { o , . . . , i } \gamma \in \{o,...,i\} γ∈{o,...,i}的数据,并建立在pivot坐标系上。
F L γ L p \bold{F}^{L_{p}}_{L_{\gamma}} FLγLp 经过上一时刻优化得到的 lidar poses T L γ L p \bold{T}^{L_{p}}_{L_{\gamma}} TLγLp (这里简写了,准确来说是 T ˉ L γ L p \bold{\bar{T}}^{L_{p}}_{L_{\gamma}} TˉLγLp )。
需要被预测的状态是: { p + 1 , . . . , i , j } \{p+1,...,i,j\} {p+1,...,i,j},里面:
p + 1 p+1 p+1是 pivot的下一个时间戳;
j j j 是窗口中当前的 lidar sweep。
有了local map之后,可以找到 M L o , i L p \bold{M}^{L_{p}}_{L_o,i{}} MLo,iLp 和原始 F L α \bold{F}_{L_{\alpha}} FLα , α ∈ { p + 1 , . . . , j } \alpha \in \{ p+1,...,j\} α∈{p+1,...,j} 之间的对应关系。
这种对应关系实质就是相对雷达运动,他们两者都是相对于他们的 pivot 位姿的运动,pivot 位姿会随着滑动窗口变化。
在 Sec. IV-B 中抽取的原始特征是坐标系 F L α F_{L{\alpha}} FLα 中最平坦或者是 edge 点。
在实际中,edge对效果提高不明显,所以我们后面只针对平面点。
使用KNN找到 x L p ∈ F L α L p \bold{x}^{L_p} \in \bold{F}^{L_{p}}_{L_{\alpha}} xLp∈FLαLp 的K个最近点 π ( x L p ) ∈ M L o , i L p \pi(\bold{x}^{L_{p}}) \in \bold{M}^{L_{p}}_{L_o,i{}} π(xLp)∈MLo,iLp;
然后将这些点拟合到坐标系 F L p F_{L_{p}} FLp 中的一个平面上去;
平面的系数通过如下方程确定:
ω T x ′ + d = 0 , x ′ ∈ π ( x L p ) \bold{ \omega }^{T}\bold{x'}+d=0, \bold{x'} \in \pi(\bold{x}^{L{p}}) ωTx′+d=0,x′∈π(xLp)
ω \bold{\omega } ω是平面的法向量;
d d d 是距离坐标系 F L p F_{L_{p}} FLp 原点 o o o 的距离;
对于每个平面特征点 x ∈ F L α \bold{x} \in \bold{F}_{L_{\alpha}} x∈FLα, m = [ x , ω , d ] ∈ m L α m=[ \bold{x},\omega ,d] \in \bold{m}_{L{\alpha}} m=[x,ω,d]∈mLα 是它的相对雷达运动。
每个 m ∈ m L α m \in \bold{m}_{L_{\alpha}} m∈mLα , x \bold{x} x定义在坐标系 F L α F_{L_{\alpha}} FLα 中, d d d 定义在坐标系 F L p F_{L_{p}} FLp 中。
D. Lidar Sweep Matching
这一部分对应上面总体框图的步骤7。
相对位姿提供的是pivot 和后续lidar poses之间的相对运动。
优化过程会优化窗口中的所有位姿,包括第一个位姿 T L p W \bold{T}^W_{L_p} TLpW(也就是说pivot所在的坐标系 F L p F_{L_p} FLp不是固定的)。
因此在lidar的 代价函数中,每个位姿都会涉及到两个量: T L p W \bold{T}^W_{L_p} TLpW 和 T L α W , α ∈ { p + 1 , . . . , j } \bold{T}^W_{L_{\alpha}},\alpha \in \{p+1,...,j\} TLαW,α∈{p+1,...,j}。
优化 pivot 的 pose 可以减小预积分误差。
估计的状态都是IMU的,因此需要通过IMU状态引入外参来表示 lidar constraints。
pivot 后面的 lidar poses 相对于 pivot 的相对位姿变换可以这样定义:
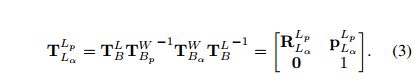
有了前面的对应关系,每个lidar 测量 m = [ x , ω , d ] ∈ m L α m=[ \bold{x},\omega ,d] \in \bold{m}_{L{\alpha}} m=[x,ω,d]∈mLα, α ∈ { p + 1 , . . . , j } \alpha \in \{p+1,...,j\} α∈{p+1,...,j} 的残差都可以表示成点到平面的距离。

E. Optimization
这一部分对应总体框图的步骤7。
优化状态的获得通过 fixed-lag 平滑和边缘化。
fixed-lag 平滑在滑动窗口内保持 N s N_s Ns 个IMU 状态( X B p W \bold{X}^W_{B_p} XBpW 到 X B j W \bold{X}^W_{B_j} XBjW),图2所示。
当有新的测量数据进啦,平滑器将加入新的量,将窗口中最旧的量边缘化。
整个要估计的量是:
X = [ X B p W , . . . , X B j W , T B L ] (5) \bold{X}=[\bold{X}^W_{B_p}, ..., \bold{X}^W_{B_j}, \bold{T}^{L}_{B}] \tag{5} X=[XBpW,...,XBjW,TBL](5)
然后去求下列马氏距离的代价函数的最小值,获的 X \bold{X} X 的最大后验估计。
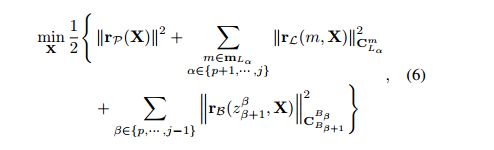
上面公式中:
r P ( X ) \bold{r}_{\mathcal{P} }(\bold{X}) rP(X) 是边缘化的先验项;
r L ( m , X ) \bold{r_{\mathcal{L}}}(m,\bold{X}) rL(m,X) 是 relative lidar constraints;
r B ( z β + 1 β , X ) \bold{r_{\mathcal{B}}}(z^{\beta}_{\beta +1},\bold{X}) rB(zβ+1β,X) 是 residual of the IMU constraints;
上面的非线性最小二乘的代价函数可以通过 Gauss-Newton 法按照 H δ X = − b \bold{H \delta X=-b} HδX=−b 的形式求解。LIO通过Ceres Solver 进行求解。
对于每个 lidar 的相对测量,可以从等式-4中获得 r L ( m , X ) \bold{r_{\mathcal{L}}}(m,\bold{X}) rL(m,X);
协方差矩阵 C L α m \bold{C}^{m}_{L_{\alpha}} CLαm 由 lidar accuracy 决定;
IMU constraint r B ( z β + 1 β , X ) \bold{r_{\mathcal{B}}}(z^{\beta}_{\beta +1},\bold{X}) rB(zβ+1β,X) 通过IMU的预积分获得,和[10]类似;
∣ ∣ r P ( X ) ∣ ∣ 2 = b P T H P + b P ||\bold{r}_{\mathcal{P} }(\bold{X})||^2=\bold{b}^T_{\mathcal{P} }\bold{H}^+_{\mathcal{P} }\bold{b}_{\mathcal{P} } ∣∣rP(X)∣∣2=bPTHP+bP 可以通过舒尔补获得[文献12];
V. REFINEMENT WITH ROTATIONAL CONSTRAINTS
将特征点注册到全局地图坐标系 F W F_W FW 而不是局部地图,能使lidar poses 具有一致性。refinement 方法使用相对lidar 测量 m L \bold{m}_L mL。
对齐最近的lidar 特征点到global map:

上面的公式中:
T = T L W \bold{T}=\bold{T}^W_L T=TLW 是小估计的lidar poses;
相对lidar 测量 m m m 中包含的 x \bold{x} x 定义在坐标系 F L F_L FL 中,系数 ω , d \omega,d ω,d 定义在 F W F_W FW 中;
然后用一个相似的Gauss-Newton方法去优化 C M \bold{C}_{\mathcal{M}} CM;
优化方式:通过残差 C M \bold{C}_{\mathcal{M}} CM, J p C \bold{J_p^C} JpC, J θ C \bold{J_{\theta}^C} JθC , θ \theta θ 是对应于四元素 q \bold{q} q 的误差状态。
长时间的误差累积会使建图错误更大,LIO采取了和文献[16]类似的方法,以 SE(2)-constraints 优化SE(3)。
这种方法保证了最后的图总是和重力是对齐的。
图3说明了这种方法:

z轴方形的姿态有更高的不确定,而roll和pitch更准确,因此姿态的Jacobian对代价函数进行限制(详细的推导在文献[12]中):
上面公式中:
( ⋅ ) ˘ \breve{(\cdot)} (⋅)˘ 是上一次迭代的状态;
Ω ˘ z \breve \bold{\Omega}_z Ω˘z 是姿态相对于坐标系 F W F_W FW 的信息矩阵的近似值;
ϵ x \epsilon_{x} ϵx , ϵ y \epsilon_{y} ϵy通过information ratio 获得;
然后,在优化步骤中通过 J p C \bold{J_p^C} JpC, J θ z C \bold{J_{\theta_z}^C} JθzC作为Jacobians,lidar poses 的增量可以表示为 δ θ z \delta\bold{\theta}_z δθz 和 δ p \delta\bold{p} δp,然后获得状态的更新:

VI. IMPLEMENTATION
介绍关于以下四个方面的内容:
- 传感器配置
- 系统初始化
- 参数
- 室内及室外测试
A. Different Sensor Configurations
lidar和IMU距离很近的时候,算法按照上面介绍的进行就可以;
lidar和IMU距离远的时候,需要将外参加到 等式-6 (总体的最小二乘代价函数),如下图:

B. Initialization
1.粗略的匹配算法使用LOAM的初始化方式;
2.当IMU和 lidar 的测量数据足够多的时候,可以用这些数据进行初始化;
3.在实验中,采用文献[10]的方式进行线性外参初始化;
4.最后再滑动窗口内进行非线性优化。
VII. TESTS AND ANALYSES
进行了室内和室外的实验,并提供定性和定量的分析。
A. Quantitative Analysis
1)不同环境下的测验:
LIO 是带有窗口优化的方法;
LIO-raw 是没有运动补偿的方法;
LIO-no-ex 是没有在线外参估计的方法;
LIO-mapping 是带有 rotaional constraints的方法,效果最好,速度在高速时效果更好,低速时漂移多一点。
2)随时间漂移
LIO-mapping 的效果比LOAM或LOAM+IMU的效果好。
B. Qualitative Results
进行了 KAIST Urban dataset 的实验,在视频中展示结果。
C. Running Time Analysis
配置:Intel i7-7700K CPU at 4.20GHz,16GB RAM
总结了室内室外雷达的建图运行时间。
VIII. CONCLUSION
1.提出了紧耦合的 lidar-IMU 融合方法;
2.LIO需要初始化,但是也更加鲁棒,更新频率也更高。