阅读笔记 《深度|详解自动驾驶核心部件激光雷达,它凭什么卖70万美元?》
原创: 黄武陵 新智元
激光雷达描绘周围环境几个主要参数,包括线数、点密度、水平垂直视角、检测距离、扫描频率、精度等。除了位置和距离信息,激光雷达还提供返回所扫描物体的密度(错误!应该是反射强度)信息,后续算法据此可以判断扫描物体的反射率再进行下步处理。通过检测目标物体的空间方位和距离,通过点云来描述3D环境模型,提供目标的激光反射强度信息,提供被检测目标的详细形状描述,不仅在光照条件好的环境下表现优秀,而且在黑夜和雨天等极端情况下也有较好表现。总的来说,激光雷达传感器在精度、分辨率、灵敏度、动态范围、传感器视角、主动探测、低误报率、温度适应性、黑暗和不良天气适应性、信号处理能力等指标方面表现优秀。
2. 激光雷达在复杂交通环境下的适用性
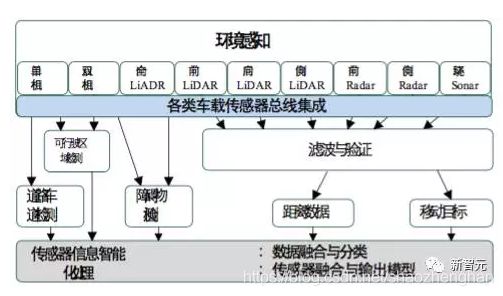
2.1 激光雷达在环境感知中的重要作用
2.1.1 道路环境检测
车道线:激光雷达通过强度信息来识别车道线。
路沿:三维激光雷达数据获得路沿等信息,映射到2D网格与相机图像信息融合处理,可以获得路面的车道边界。将激光雷达与相机视觉检测的空间/时间数据融合,进行车道估计与跟踪,结合从地图数据生成的车道曲率约束和可参考的车道等信息,则可以获得高可信的车道估计。
通过坐标转换形成点云的栅格化表述,并从中区分地面点的集合以及地面以上障碍点的集合,完成地面和障碍物分离,形成地面估计与分割。在非结构化的越野环境中行驶,还需考虑包括地面起伏、凸起障碍、负障碍物、水体等多种环境要素,完成可行驶区域检测。
2.1.2 目标检测与跟踪
由于行驶环境的复杂性,特别是道路中交通拥挤等情况下,车辆间容易互相遮挡以及行人目标较多且行走较难预测等,实现可靠的各类目标检测与跟踪存在较大挑战。
在接收到原始点云数据并进行点云栅格化描述、完成地面和障碍物分离以及地面估计与分割的基础上,采用目标聚类方法,通过栅格网叠加以及表面特征匹配,结合目标尺度比较,可确认跟踪列表并进行目标跟踪。其中,采用几何模型和运动模型假设结合的方法进行目标检测跟踪,可以有效地处理目标几何特征不明显的情况下多目标检测与跟踪,结合目标位置、速度以及速度方向的最优估计,容易获得周边车辆和行人的可靠检测。
当对象被遮挡时,分类可能会失效。通过跨帧跟踪可以解决这个问题。跟踪的第一步是确认身份(ID),通过查找特征相似度最高的对象,将之前帧的对象列表中的对象与当前帧的对象匹配。同时考虑连续帧中,2两个对象的位置和速度,同一对象在两个连续帧中的位置速度应该接近。确定ID后,结合跟踪算法估计下一个时间步的位置速度等运动状态,以助于下一帧的跟踪。
2.1.3 地图构建和定位
自主驾驶过程中需要一个厘米级的高精度地图
通过采用激光雷达多次行驶获取道路的三维点云数据,进行人工标注,过滤一些点云图中的错误信息,对多次收集的点云数据进行对齐拼接最终形成高清地图。所建立路面模型包含较全的交通标志和交通信号灯,车道线位置、数量和宽度等,道路坡度和斜率等,还包括车道限高、下水道口、障碍物以及其他道路细节。
通过局部点云匹配和全局点云匹配的位置估计方式,获得给定的当前位置情况下观测到点云信息的概率分布,结合对当前位置预测的概率分布,就可以提高无人车定位的准确度(也就是:先验概率+测量更新=后验概率,这也是贝叶斯的思想)。在点云匹配过程中,采用3D地图和实时获得的局部3D点云,通过顶视图的正交投影,转换为一个栅格化的2D反射率和高度网格图,进行两者之间的地图特征匹配计算,可获得高置信率的位置估计。
2.2 面向无人驾驶应用的激光雷达适用挑战
2.2.1 影响激光雷达精度的外部因素
影响其感知精度的外部因素包括天气,车辆自身的运动状态,随机扰动和传感器安装位置等。其中,雨雪天气容易对激光雷达产生影响。
车辆速度也对所获得的激光点云数据质量有一定影响,特别是高速行驶状态下对激光雷达信息处理实时性要求较高。此外,由于车辆转弯引起侧倾等运动轨迹的变化,车辆轮胎的滑移及地面颠簸抖动引起的一定随机扰动等,也对激光雷达传感器形成的点云数据精度上有一定的影响。激光雷达的安装位置及其俯仰角等,使之可能受到不同的环境干扰。
问题:IMU是否能准确的获取自车的姿态???
2.2.2 极端天气下的影响
夜间表现良好。
冰雪天气,则是激光雷达感知的挑战,道路因结冰或积雪而导致反射特性发生变化,导致激光雷达的检测效果受到影响,从而影响到三维地图的构建;此外,由于积雪覆盖也引起了道路环境的形状和边界发生变化。需要从算法层面对良好天气下构造的精准地图加以利用,在冰雪天气结合已有的地图完成顺利的感知与规划也很重要。
3. 面向无人驾驶的激光雷达产品集成化与智能化挑战
3.1 现有激光雷达面临产品设计和供应链的挑战
在产品设计方面,要求激光雷达传感器尺寸越小并且容易安装在无人驾驶车上,需要将机械旋转部件做到最小甚至不用旋转器件
除了要求视场角覆盖、角分辨率、检测精度和距离等指标之外,还要求信息采集处理的实时性。此外,要改变现有激光雷达生产中的紧密光学器件的校准等繁琐环节,减少标定过程的人工介入,从而降低人工和器件的成本。
3.2 激光雷达传感器的集成化和智能化挑战
3.2.1 面向无人驾驶的激光雷达配置与安装
在现有技术基础上,如能将激光雷达与车载其他传感器进一步集成,则可简化方案
3.2.2 面向无人驾驶的激光雷达智能化挑战
激光雷达传感器如果能够结合传感器特点进行原始数据的预处理,提供云数据处理结果,提供从硬件到处理软件的一体化方案,有效降低用户门槛,提高应用广度。
Ibeo的软件方案则包括算法端设计,可直接输出周围车辆、行人、障碍物、路面等检测到的环境信息。
也就是说,目标的检测与识别分类算法(包括上游的数据的预处理等)集成到激光雷达的处理器软件里面。而非在汽车的控制器里面。
4. 激光雷达传感器的标定与测试
4.1 激光雷达参数与繁琐的标定过程
大部分激光雷达中,通过电控扫描方式控制线阵中每个激光二极管(Laser Diode - LD)发射脉冲激光,经发射光路整形,激光脉冲到达目标表面并返回,经接收光路接收,聚焦到对应光电传感器(APD)并转换为电信号,电信号处理,测距、测灰度;激光探测模块中32元通过电控扫描在竖直方向次第测量,同时围绕竖直轴做360°旋转扫描;所采集原始数据计算生成激光三维点云,数据上传并实现对激光点云数据同步处理。其中,多个步骤涉及精密光学器件的调校,光学收发透镜需要精确设计,这些环节比较费时费力。
4.1.1 车载激光雷达的标定
激光雷达与车体为刚性连接,两者间的相对姿态和位移固定不变,为了建立各个激光雷达之间的相对坐标关系,需要对激光雷达的安装进行标定,并使激光雷达数据从激光雷达坐标统一转换至车体坐标上。通过建立车辆质心坐标系、雷达基准坐标系以及车载激光雷达坐标系,将激光雷达的数据转换到基准坐标系中,结合雷达的俯仰角和侧倾角(为何?),再将其统一转换到车辆坐标系下。如果有多个车载激光雷达,为了能够得到统一形式的环境信息,需要确立统一的车辆坐标系,并把所有激光雷达的数据转换到该坐标系下。
4.1.2 多线激光雷达的内部参数
理想状态下,激光雷达多线束激光从坐标系原点射出,且每束激光的起始位置都为坐标系原点。但实际上,每个激光传感器安装位置不同,光束的水平方位角也有差异,光束并不在同一个垂直平面内。因此,对应每个激光器都有一组校准标定参数,通过标定方法对参数进行标定,即每个激光束的位置和方向的参数估计[3]。以Velodyne HDL - 64E激光雷达为例,出厂时对每束激光校准参数都已进行标定,但在使用时一般还需对该校准参数进行重新标定。获取64束激光的标定参数后,可将每条激光束返回的距离值 和当前激光雷达的旋转角度 转化为激光雷达坐标系中的笛卡尔坐标 。
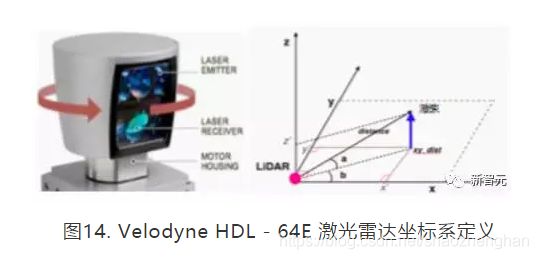
Velodyne HDL - 64E 激光雷达坐标系定义
为了将激光雷达返回的距离和角度信息转换为激光雷达坐标系中的笛卡尔坐标,需要对每一条激光束采用5个参数进行建模。然后通过5个参数将每条激光返回的距离值转换为3D点坐标[11],包括距离校正因子 ,垂直偏移量 ,水平偏移量 ,垂直校正角 和旋转校正角 。
4.1.3 多线激光雷达的外部参数
激光雷达外部参数包括激光雷达的俯仰角与侧倾角等,通常可采用等腰直角三角标定板、正方形标定板、标定箱等工具结合标定程序完成外部参数确定。但是,这类外部参数标定方法还依赖于标定板等工具,最好能够实现自动标定方法,例如已有研究中的交互信息最大化外部自动标定法;激光摄像头融合的边缘对齐联合自动标定法和测距与图像融合的基于线段外部参数标定法等[9]。如图7所示的测距与图像融合的基于线段外部参数标定法,无需特殊的人工标定目标,通过自然线性特征获取来确定精确线段变换。通过一组点云形成的3D线段以及一组从图像获得的2D线段之间的对应关系,以及两者相对平移和旋转的联合估计的优化解,来获得外部标定参数。

4.1.4 摄像机和激光雷达联合标定
通过提取标定物在单线激光雷达和图像上的对应特征点来进行摄像机外部参数的标定,从而完成单线激光雷达坐标、摄像机坐标、图像像素坐标等多个传感器坐标的统一,实现激光雷达与摄像机的空间对准。
激光雷达、摄像机与无人驾驶汽车为刚性连接,因此在同一空间内,每个激光雷达的扫描数据点都在图像空间中存在唯一对应点。通过建立合理的激光雷达坐标系与摄像机坐标系,利用激光雷达扫描点与摄像机图像的空间约束关系,即可求解两坐标系的空间变换关系,从而完成激光雷达与摄像机的空间对准,实现激光雷达数据与可见光图像的关联。在此,激光雷达与摄像机的空间对准问题就转变为在给定雷达图像对应点的情况下的函数拟合问题。
利用标定箱,通过对扫描形状的判断,可手工选取出其扫描到标定箱边界的激光点并提取出该点坐标。标定箱的棱角在摄像机中成像清晰,容易获取。通过多次改变标定箱的远近和方位,使其位置尽可能地均匀分布在图像分辨率范围内的各个位置,而通过采集多帧同步后的图像和激光雷达扫描数据,即可获得多组图像雷达对应点对。
同样,现有的研究也集中在解决参数的自动标定问题。例如,基于边缘对齐的外部参数联合自动校准和融合的激光雷达与相机自动标定技术,以及其他相机与激光雷达的在线标定技术,还有助于克服传感器漂移和扰动校正等。

4.2 激光雷达测试技术:突破应用场景限制
(1)车用激光雷达设备性能测试,包括振动测试、温度测试、环境测试、计量精度测试、回波强度测试、数据一致性及完整性测试等。
(2)车用激光雷达常用指标测试,包括设备的测量帧率、点频率稳定性;水平角视场大小,水平角分辨率;垂直角视场大小,垂直角分辨率;距离分辨率、测距误差和不同反射率的固定大小目标的探测距离等。测试设备系统启动时间,目标的检出时间等。除了上述常用指标之外,还将就激光雷达工作的自车速度范围,检测对象目标大小,目标反射率、目标检出率等指标进行测试。此外,还将一级指标细化为二级评测指标,例如检测距离的二级指标包括目标最大测距,目标有效检测距离,目标分类距离,目标最佳分类距离等。

(3)车用激光雷达检测信息丰度测试,包括车用激光雷达检测信息丰度测试,涵盖目标检测完整度和精确度测试。目标列表包括可行驶区域内的结构化和非结构化路面、路沿,周边其他车辆和非机动车辆,行人,动态和静态障碍物目标等。
2)车载激光雷达的测试方法
针对测试指标构建车用激光雷达测试场景,建立标定场、控制点和检测点,通过设置标靶,结合已有的高精度、高置信度测试仪器进行激光雷达标定,通过控制点进行测评指标精度分析,结合检测点进行指标精度对比分析,最后形成指标参数精度的置信描述。
在自主驾驶模拟器中建立激光雷达传感器接口,将激光雷达采集的测试环境数据或者仿真软件生成的测试数据,输入自主驾驶仿真器中,在仿真软件中还原真实或者仿真的测试场景,从而开展激光雷达传感器的平行测试。结合仿真模拟测试与实际环境测试虚实联动的测评方法,对激光雷达进行完整评测。
参考文献
-
车云网,www.cheyun.com
-
新智元公众号
-
北科天绘,http://www.isurestar.com/index.php
-
Velodyne,http://velodynelidar.com/
-
Ibeo, http://www.ibeo-as.com/
-
Junior: The Stanford Entry in the Urban Challenge, Michael Montemerlo, Jan Becker, .., and Sebastian Thrun. 2008. Junior: The Stanford entry in the Urban Challenge. J. Field Robot. 25, 9 (September 2008), 569-597.
-
辛煜.无人驾驶车辆运动障碍物检测、预测和避撞方法研究[D].中国科学技术大学,2014.
-
刘钊.无人车2D激光雷达结构化环境感知技术研究[D].国防科学技术大学,2013.
-
海智渊.激光3D导航系统设计与研究[D].长春理工大学,2014.
-
Jaycil Z. Varghese, Overview of Autonomous Vehicle Sensors and Systems Varghese J Z, Boone R G. Overview of Autonomous Vehicle Sensors and Systems[J].
-
陈慧岩.智能车辆先进技术丛书:无人驾驶汽车概论.北京理工大学出版社,2014
-
黄武陵.无人驾驶汽车带来的交通便利[J].单片机与嵌入式系统应用,2016,16(6):6-8.
-
黄武陵.智能车辆环境感知技术与平台构建[J].单片机与嵌入式系统应用,2016,16(8):9-13.
-
黄武陵.智能车辆的道路检测及其应用[J].单片机与嵌入式系统应用,2016,16(9):3-7.
-
黄武陵.激光雷达在无人驾驶环境感知中的应用[J].单片机与嵌入式系统应用,2016,16(10):3-7.
-
基于ROS构建无人驾驶车辆环境感知系统[J].单片机与嵌入式系统应用,2016,16(11)