深入理解如何不费吹灰之力搭建一个无人驾驶车(三)2D-小车拓展部分(AMCL+EKF)(EKF协方差矩阵如何写?)
三、2D小车定位拓展
本文讲一下不是很难的高中部分,主要是AMCL及EKF,两种定位方法
3.1 AMCL定位
首先讲一下AMCL算法,自适应蒙特卡罗粒子滤波定位,其实在gmapping中,我们就要用轮式里程计的odom产生粒子,有些东西,讲大家可能不懂,可以见概率机器人或机器人学状态估计,在贝叶斯滤波中,置信度的更新是靠观测,即一个归一化系数*P(Zt|xt)*预测置信度bel(xt),这个预测bel一般上面有一横,CSDN不知道怎么打,这个预测bel是由运动方程及上一刻的置信度积分得到,总之,粒子滤波就是让符合观测P(Xt|Zt)的现在的粒子(预测的bel)更容易下一次被采样到,其实就是用离散的方法去近似连续,从而减少计算量,但粒子滤波容易出现粒子缺乏和粒子冗余,故我们用Augmented MCL改善了粒子缺乏,用KLD-MCL改善了粒子冗余。
原生粒子滤波如下:

如何根据运动模型采样粒子呢,对t-1时刻的粒子知道车子向x方向运动了10米,那么把t-1时刻的粒子的x坐标都加10,这是最简单的做法,但是根据里程计运动模型:实际上运动到那后你还要加上一随机增量,这个随机增量服从高斯分布,且协方差由下面的公式决定:

这个很关键,我们下一篇说。
那么如何通过计算机程序从一个高斯分布采样呢,高斯分布如下:(图来自百度百科)

我们把-3到3的函数拉成一条线,每段的长度等于其函数的高度及y值,然后生成一个随机数,看他落在哪个区间就好了,这种是用直方图的方法(使用时常取一段区间,用面积表示拉成直线的长度),但我希望我是直接建立从概率到值的映射,这里用Box-Muller方法:
随机抽出两个从[0,1]均匀分布的数字u和v。然后: 参考这篇文章

则Z1,Z2服从标准正态分布,若指定期望为E,方差为V,则令:
Z= Z * V + E;
也可以使用c++ 的 random库
Augmented MCL如下:

KLD MCL如下:

Augmented MCL说白了就是因为比方说位姿服从高斯分布,向两边延伸概率越来越小,但粒子滤波却不能在那里产生粒子,如果此时你把机器人蒙上眼睛和雷达抱到另一个地方了,那你就悲剧了,粒子难以收敛,所以AugmentedMCL改进就是如果粒子难以收敛到一点附近,那么我们就在全局随机产生一些粒子,越不收敛因随机产生的粒子越多,具体见概率机器人定位那章。
KLD MCL说白了就是如果传感器太牛逼了,最后粒子都收敛到一点附近,那这一点精确度已经够高了,粒子数对精确度提升不大,所以我们希望减少一些粒子,这个衡量单位是在一个栅格中的粒子。
AMCL就是这两者结合,你也可以尝试去自定义粒子分布的形状,这些概率机器人都有,就不说了,蛮简单的。
要使用AMCL你需要用mapserver先保存gmapping或其他算法建的地图,在linux命令行输入
rosrun map_server map_saver -f mymap
之后在launch文件加上你保存地图的路径并运行movebase:
在加上AMCL的launch
详见amcl参数含义及《概率机器人》及gmapping的解释,比如KLD那个参数就是概率机器人KLD MCL里的,这些参数都很简单,看名字都能懂,如果实在不懂点赞给我发信息,谢谢。
之后启动rviz发一个目标就能进行导航了,不过地图是直接出现了,就是你之前建好的地图,且不能更新。
3.2 EKF定位及协方差矩阵如何写
EKF全称是拓展卡尔曼滤波,那么卡尔曼滤波(KF)是个什么东西呢
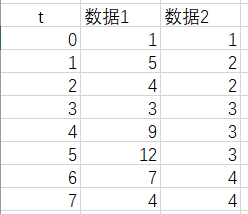
对,位姿的x方向里程估计的数据有这两组,我们更愿意相信哪个数据呢?是不是数据二,因为它方差更小,这就是KF的原理,KF系属于高斯滤波(连续贝叶斯滤波),但是假设分布时高斯分布在实际情况往往是极其不准确的,因为你建立的误差模型可能不是服从高斯分布的,那你就必须通过计算把你的误差模型转换为高斯分布,这是极其麻烦的,所以现在都是用粒子滤波(离散贝叶斯滤波)较多,具体见下图:引用自概率机器人:
 假设置信度预测就是最左边那个分布,而观测P(Zt|Xt)就是最右边那个分布,KF的结果是将这两者叠加得到中间实线那个分布,我们知道高斯分布曲线越胖,方差越大,所以我们通过这种高斯滤波方法让对位姿估计的不确定性降低了,但是当机器人继续运动的时候,置信度分布曲线还是会变胖,所以我们要继续高斯滤波,这样循环往复。
假设置信度预测就是最左边那个分布,而观测P(Zt|Xt)就是最右边那个分布,KF的结果是将这两者叠加得到中间实线那个分布,我们知道高斯分布曲线越胖,方差越大,所以我们通过这种高斯滤波方法让对位姿估计的不确定性降低了,但是当机器人继续运动的时候,置信度分布曲线还是会变胖,所以我们要继续高斯滤波,这样循环往复。
KF系属贝叶斯滤波其公式为:

而KF的伪代码为:

是不是就是贝叶斯滤波啊。而EKF是因为,比方说,你运动轨迹是一个圆,由运动模型如下,见《概率机器人》

是不是我们会由平移及角度计算X方向及Z方向的增量(用cos,sin这些三角函数),但其不是线性的,那我们将其泰勒展开,保留前两项(最多到一阶),之前无法知道KF的A和B和C这三个参数无法算协方差,展开后我知道了,于是就可以算协方差了。
而EKF伪代码如下:

另一种常用的KF系算法就UKF,通过无损变换进行滤波,伪代码如下:

UKF肯定比EKF好些,但是因为假定高斯分布,准确性在现实情况不高,需要一种比较好的误差模型构造支持。
ROS中我们常用到robot_pose_ekf这个包,其实我发现CSDN上没有一篇讲的清楚的,因为一些东西卡了很久,他需要的东西如下,首先是wheel_odom包括协方差矩阵,(不需要到base_link的tf,这个很重要),imu包括协方差矩阵,imu到tf的信息,vo,gps,后面两个可选,有了这些运行这个包就OK
launch如下定义:
然后关键是要建立正确的误差模型。这里我根据里程计运动模型写了个协方差矩阵的计算,它是6*6的矩阵,即(x,y,z,r,p,y)3个直角坐标,3个旋转角。若这6个相互独立,那么协方差矩阵只有对角线有值,(注:如果是单纯EKF建议直接写雅可比矩阵的值),代码如下:
for(int i = 0 ; i < 36 ; i++){
odom_.pose.covariance[i] = 0;
}
//i*6+j 因为是二维就只有xy及转角θ
odom_.pose.covariance[0] = cov_a3x_*delta_x*delta_x + cov_a4x_*(delta_pre_theta_*delta_pre_theta_+delta_theta*delta_theta); //x
odom_.pose.covariance[7] = cov_a3y_*delta_y*delta_y + cov_a4y_*(delta_pre_theta_*delta_pre_theta_+delta_theta*delta_theta); //y
odom_.pose.covariance[14] = pow(0.1); //z
odom_.pose.covariance[21] = pow(0.1); //r
odom_.pose.covariance[28] = pow(0.1); //p
odom_.pose.covariance[35] = cov_a1_*(delta_theta*delta_theta) + cov_a2_*(delta_dis*delta_dis); //theta
if( !delta_x || !delta_y || !delta_theta ){
odom_.pose.covariance[0] = pow(0.1);
odom_.pose.covariance[7] = pow(0.1);
odom_.pose.covariance[35] = pow(0.1);
}
odom_pub_.publish(odom_);
delta_pre_theta_ = delta_theta; //在下一次算的时候能用到上一次的数据
公式来自概率机器人里程计运动模型

而imu的误差模型包括噪声(Bias and Noise)、尺度因子(Scale errors)和轴偏差(Axis misalignments)。在ROS上协方差矩阵是只需提供(r,p,y)的方差,若这6个相互独立,那么协方差矩阵只有对角线有值。校准见imu误差模型。
然后把协方差公式写入代码即可。
好了EKF就讲完了,希望大家多多关注。下一章讲如何从头到尾用ROS自己创建一个slam算法