撸狗初体验 | 手把手教你上手 HuskyLens 哈士奇人工智能摄像头
直接上视频听我 BB:
https://www.bilibili.com/video/av75675708
下面开始编故事……
某个周末,走在去加班的路上,脚底突然被某个东西咯噔一下,抬脚一看,竟然是……
捡起来一看……
哈士奇!哈士奇!哈士奇!
竟然是 DF 还在预售的 HuskyLens 人工智能摄像头(中文名:哈士奇) !
这个故事告诉我们:喜欢加班的创客,运气不会太差。
HuskyLens 功能介绍
HuskyLens 是什么?
这里简单截取官网介绍的一部分:
HuskyLens 是一款简单易用的人工智能摄像头(视觉传感器),内置 6 种功能:人脸识别、物体追踪、物体识别、巡线追踪、颜色识别、标签(二维码)识别。仅需一个按键即可完成 AI 训练,摆脱繁琐的训练和复杂的视觉算法,让你更加专注于项目的构思和实现。

详细介绍,可以查看官网说明: https://www.dfrobot.com.cn/goods-2050.html
哈士奇官方介绍视频,请直接跳转 B 站:
http://player.bilibili.com/player.html?aid=66695069&cid=115655109
用 3 个单词就可以概括 HuskyLens 的特性:Click、Learn & Play。
总之:简单、易用、真香!
这么香的工具,到底该怎么玩呢?请继续往下看。
注意:以下章节偏技术性,是对体验视频的文字性详细描述,会略微无聊,请收藏后慢慢阅读。
HuskyLens 数据读取测试
由于 HuskyLens 目前还没有正式上市,所以关于它的资料非常少,DF 暂时也没有放出 HuskyLens 对应的函数库,更不用说在 Mind+ 等图形化编程工具中调用了。不过相信不久,我们就可以在 Mind+ 中看到它了,到那时,它的使用就会更加简单、更加小白了!
暂时我们只能根据它的通信协议,徒手来撸代码了。
HuskyLens 默认采用串口通信,当然可以在它的设置中改成 I2C 通信。默认的串口波特率为 57600 bps,格式为 8N1( 8 位数据位、无校验、1位停止位 ),默认通信地址为 0x11。本文中,我带领大家使用掌控板来读取 HuskyLens 的数据。
当然你也可以选择使用 Arduino、Raspberry Pi、LattePanda、micro:bit 等控制器来读取 HuskyLens 的数据,原理都是一样的,就留作课后作业吧,看文本文后,你能不能用其他主控板来读取 HuskyLens 的数据呢?
电路连接图如下:

关于掌控板串口的补充说明:
掌控板的主控芯片是 ESP32,ESP32 有 3 个串口,分别是
Serial、Serial1、Serial2。Serial我们一般用来下载程序,Serial1默认使用了GPIO 9和GPIO 10,但是 ESP32 的GPIO 6~11一般用于连接外部 Flash 芯片,所以我们这里使用Serial2与 HuskyLens 连接通信。另外,ESP32 可以将串口 RX 映射到几乎所有 IO 口上,TX 映射到GPIO 0~31上(此处没有进行验证)。所以,这里我们将掌控板
Serial2的 RX 映射到 P14 引脚,将 TX 映射到 P13 引脚。参考资料: https://blog.csdn.net/Naisu_kun/article/details/86004049
我们来看一下 HuskyLens 的通信协议。它主要有两种模式,正如视频中看到的那样,大部分情况下, HuskyLens 屏幕上会显示一个方框(Block 模式),在巡线模式下,它会显示一个箭头(Arrow 模式)。这两种模式下,数据的长度和格式基本是一致的,这里我们以 Block 模式为例进行讲解,Arrow 模式原理一样,此处不再赘述。
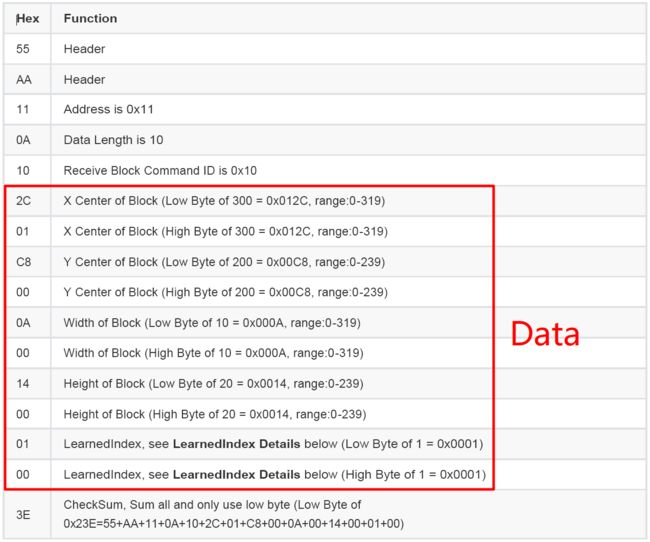
我们来看一下它的数据格式,可以看到它是以0x55和0xAA开头的一串数据,紧接着是它的通信地址 Address、数据长度 Data Length、命令代码 Command,以及我们最关心的数据 Data。最后是一个校验位。

每个数据的含义如下:
Block 模式:
Arrow 模式:

上面两个表格中红框框出来的是相应的数据 Data 1 ~ Data n,其中:
- X Center 表示方框 Block 的几何中心的 X 坐标;
- Y Center 表示方框 Block 的几何中心的 Y 坐标;
- Width 表示方框 Block 的宽度;
- Height 表示方框 Block 的高度;
- LearnedIndex 表示识别目标的编号。
我们根据通信协议,编写程序来读取一下 HuskyLens 返回的数据。
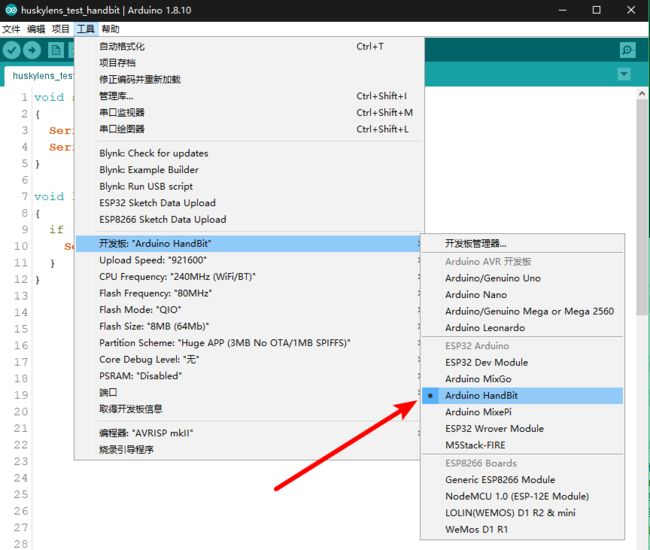
首先打开 Mixly 自带的 Arduino IDE,选择 Arduino HandBit (掌控板)进行编程。
最新版 Mixly 1.0 下载地址: https://mixly.readthedocs.io/zh_CN/latest/basic/02Installation-update.html
程序如下:
void setup()
{
Serial.begin(57600);
Serial2.begin(57600, SERIAL_8N1, P14, P13);
}
void loop()
{
if (Serial2.available() > 0) {
Serial.println(Serial2.read(), HEX);
}
}
将程序上传到掌控板,打开串口监视器,可以看到会返回类似下图中的数据:
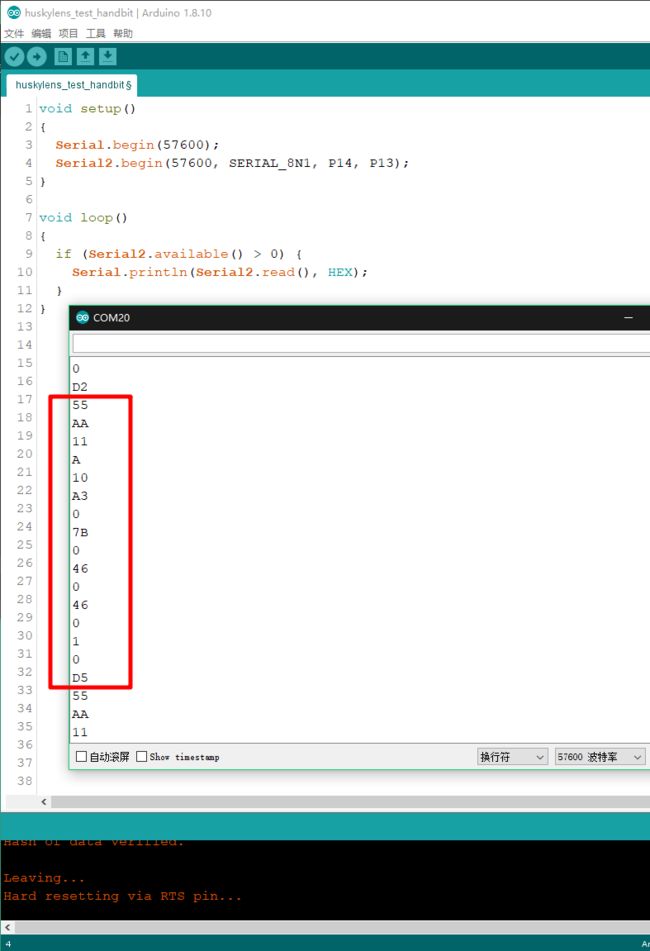
但是这些数据代表着什么意思呢?我们将关键数据圈出来:0x55、0xAA、0x11、0x0A、0x10、0xA3、0x00、0x7B、0x00、0x46、0x00、0x46、0x00、0x01、0x00、0xD5。其中:
0x55为 Header;0xAA为 Header 2;0x11为 Address;0x0A为 Data Length;0x10为 Command,Block 模式下为0x10,Arrow 模式下为0x11;0xA3、0x00分别为 X Center 的低 8 位和高 8 位,0x00A3换算后为 163,代表 X 坐标为 163;0x7B、0x00为 Y Center 的低 8 位和高 8 位,0x007B换算后为 123,代表 Y 坐标为 123;0x46、0x00为 Width 的低 8 位和高 8 位,0x0046换算后为 70,代表方框宽度为 70;0x46、0x00为 Height 的低 8 位和高 8 位,0x0046换算后为 70,代表方框高度为 70;0x01、0x00为 LearnedIndex 的低 8 位和高 8 位,0x0001换算后为 1,代表识别物体的编号为 1;0xD5为 Checksum 的低 8 位,我们将上面所有数据相加求和:0x55 + 0xAA + 0x11 + 0x0A + 0x10 + 0xA3 + 0x00 + 0x7B + 0x00 + 0x46 + 0x00 + 0x46 + 0x00 + 0x01 + 0x00 =0x02D5,低 8 位是0xD5说明校验通过。
至此,我们就完成了 HuskyLens 数据的简单读取。
但是每次都要这么去读取数据,然后再进行手工计算么?这还怎么做人工智能项目啊?
当然不是的,我们发现,读取这些数据就是都是一件件重复的事情,而程序最擅长的就是做重复的事情了。
HuskyLens 数据解析
我们将上面的程序简单调整一下,duang~ 就完成了!(程序源代码详见文末下载链接,建议配套代码一起阅读下文)

我们先定义了一些变量,用来存放数据。这些变量的名字,基本可以自解释其含义,此处不再赘述说明。
#define LENG 15 // 0x55 + 15 bytes equal to 16 bytes
unsigned char buf[LENG];
int xCenterOrXOrigin = 0;
int yCenterOrYOrigin = 0;
int widthOrXTarget = 0;
int heightOrYTarget = 0;
int learnedIndex = 0;
在 setup() 中,主要是对两个串口进行初始化:
void setup()
{
Serial.begin(57600);
Serial2.begin(57600, SERIAL_8N1, P14, P13);
}
然后在 loop() 中,不断去读取掌控板串口 2(Serial2)中返回的数据。首先要判断第 1 个读到的数据是否是默认的 Header 0x55,我们用了find()函数:
// Header
// Read data until get the first header of data packet 0x55
if (Serial2.find(0x55))
{
// ......
}
如果读取到0x55,那么就把剩下的 15 个数据都读取进来,并存储到 buf 变量中。因为一个有效的通信命令共16个数据,大家可以在通信协议中数一下。
// Read the next 15 data
Serial2.readBytes(buf, LENG);
接着去检查第 2 个数据是否是默认的 Header 2 0xAA。这里需要注意的是,我们并没有把第 1 个 Header 数据 0x55 存储到 buf 变量中,所以 buf[0] 不是 0x55,而是 0xAA。
// Header 2
// Check the second header of data packet 0xAA
if (buf[0] == 0xAA)
{
// ......
}
如果第 2 个数据也是默认的包头的话,再去对剩下的数据进行校验,这里调用校验和函数 checkSum(),具体这个函数怎么实现的,下面再讲。
// Checksum
if (checkSum(buf, LENG))
{
// ......
} else {
Serial.println("Checksum Errorrrrr!");
}
校验和通过后,就可以对数据进行处理和计算了。在下面的程序中,我们先把原始数据打印出来:
// print the command list
Serial.print(0x55, HEX);
Serial.print(" ");
for (int i = 0; i < LENG; i++)
{
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
然后通过 5 个函数分别去计算 Data 中的几个值。最后再将这些数据在串口监视器中打印出来。
// get the values
xCenterOrXOrigin = getX(buf);
yCenterOrYOrigin = getY(buf);
widthOrXTarget = getWidthOrXTarget(buf);
heightOrYTarget = getHeightOrYTarget(buf);
learnedIndex = getLearnedIndex(buf);
// print the values
Serial.print("x: ");
Serial.print(xCenterOrXOrigin);
Serial.print(" ");
Serial.print("y: ");
Serial.print(yCenterOrYOrigin);
Serial.print(" ");
Serial.print("width: ");
Serial.print(widthOrXTarget);
Serial.print(" ");
Serial.print("height: ");
Serial.print(heightOrYTarget);
Serial.print(" ");
Serial.print("learnedIndex: ");
Serial.print(learnedIndex);
Serial.print(" ");
Serial.println();
Serial.println("-----------------------------");
Serial.println();
这样我们就把数据读取出来啦。
几个函数说明
checkSum()
checkSum() 函数的功能就是校验读取到的数据是否正确。只要简单讲读到的数据相加,并最终取和的低 8 位,检查是否和读到的最后一个数据相等即可。相等的话,将标记变量 receiveflag 赋值为 1 即可,否则赋值为 0,并返回 receiveflag 的结果。
// check sum
char checkSum(unsigned char *buf, char leng)
{
char receiveflag = 0;
int sum = 0;
int sumLow = 0;
for (int i = 0; i < (leng - 1); i++)
{
sum = sum + buf[i];
}
sum = sum + 0x55;
sumLow = sum & 0x00FF;
if (sumLow == buf[leng - 1])
{
sum = 0;
receiveflag = 1;
}
return receiveflag;
}
getX()
getY()
getWidthOrXTarget()
getHeightOrYTarget()
getLearnedIndex()
这 5 个函数的原理基本一致,其函数名基本可以自解释含义,此处也不再赘述解释每个函数的功能。
这里以第 1 个函数 getX() 为例,介绍这几个函数内部的原理。
通过查看通信协议,我们可以知道,X 坐标的数值,分别存储在 buf 变量中的第 5 个和第 6 个(实际是完整数据的 6 个和第 7 个数据,但是 buf 变量中没有存储第 1 个数据 0x55),所以这里取 buf[4] 和 buf[5] 来进行计算即可。 由于是 16 进制的数据,所以可以通过移位进行计算,当然这里的 << 8 等价为 * 256。最后将计算出来的值返回即可。
// X Center of Block [Block mode]
// or X Origin of Arrow [Arrow mode: Line tracking mode]
int getX(unsigned char *thebuf)
{
int xCenterValue;
// calculate X Center of Block value
xCenterValue = ((thebuf[5] << 8) + thebuf[4]);
return xCenterValue;
}
其他几个数据,也是同样道理,只要取对应的数据位进行计算即可。
总结
通过这一章节,我们根据 HuskyLens 的通信协议,把 HuskyLens 返回的数据都读取出来了。那么我们可以利用这些数据做一些什么有趣好玩的事情呢?
物体追踪,人脸识别,物体识别,巡线追踪,颜色识别,标签识别等功能,要怎么用呢?
交互手势控制、自主机器人、智能门禁、交互式玩具等又要怎么实现呢?
我们下期见!
代码下载
请到知识星球下载本教程对应的源代码:https://t.zsxq.com/RB6EaYf