【目标检测论文阅读笔记】Reducing Label Noise in Anchor-Free Object Detection
(Augmentation for small object detection)
Abstract
当前的 anchor-free无锚目标检测器 将空间上落在真值框预定义中心区域内的所有特征标记为正。这种方法会在训练过程中产生 标签噪声,因为这些 正标记的特征中的一些 可能位于背景或遮挡物目标上,或者它们根本不是判别性特征。在本文中,我们提出了一种新的标记策略,旨在减少无锚检测器中的标签噪声。我们将源自单个特征的预测汇总为单个预测。这允许模型在训练期间减少非判别性特征的贡献。我们开发了一种新的单阶段无锚目标检测器 PPDet,以在训练期间采用这种标记策略,并在推理期间采用类似的预测池化方法。在 COCO 数据集上,PPDet 在 anchor-free 自上而下检测器中实现了最佳性能,并且与其他最先进的方法性能相当。它还优于所有主要的单阶段和两阶段小目标检测方法 (APS 31.4)。
代码可在 https://github.com/nerminsamet/ppdet 获得。
1 Introduction
早期基于深度学习的目标检测器是两阶段的、候选框proposal驱动的方法 [7、22]。在第一阶段,生成一组稀疏的候选框,并在第二阶段使用卷积神经网络 (CNN) 对它们进行分类。后来,在单个阶段进行统一检测的想法得到了越来越多的关注 [6、14、16、21],其中 候选框被预定义的锚框所取代。一方面,锚框必须密集地覆盖图像(在位置、形状和尺度方面)以 最大化召回率;另一方面,它们的数量应该保持在最低限度,以减少推理时间和它们在训练过程中产生的不平衡问题[19]。
在 解决 anchors 的缺点上花费了大量的努力:已经提出了几种方法来提高 anchors 的质量 [27、29],以解决极端的前景-背景不平衡 [14、19、24],最近,已经开发了单阶段无锚方法。 anchor-free 目标检测中主要有两组突出的方法。第一组是 基于关键点 的自下而上方法,在开创性工作 CornerNet [11] 之后得到推广。这些检测器 [4、11、17、32] 首先检测对象的关键点(例如角点、中心点和极点),然后将它们分组以产生整个目标的检测。第二组 无锚目标检测器 [10、25、33] 采用自上而下的方法,直接预测最终特征图中每个位置的类和边界框坐标。
目标检测器训练的一个重要方面是 用于标记候选对象的策略,它 可以是最终特征图中的proposals、锚点 或 位置(即特征)。为了在训练期间将候选者标记为“正”(前景)或“负”(背景),基于交并比(IoU)[3、14、16、22],关键点 [ 4, 11, 17, 32] 和 相对于真值框的位置 [10, 25, 26]。特别是在自上而下的无锚目标检测器中,在输入图像通过主干特征提取器和 FPN [13] 后,空间上落在真值框内的特征被标记为正,其他标记为负——有两者之间还有一个“忽略”区域。这些 正标记的特征中的每一个 都作为单独的预测 对损失函数做出贡献。这种方法的 问题在于,其中一些正标签可能是明显错误的或质量很差,因此,它们会 在训练过程中注入标签噪声。
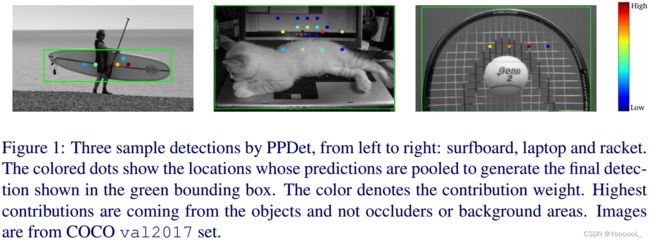
噪声标签来自(i)目标上的非判别性特征,(ii)真值框内的背景特征,以及(iii)遮挡物(图1)。在本文中,我们提出了一种 anchor-free 目标检测方法,该方法放宽了正标记策略,使模型能够在训练过程中减少非判别性特征的贡献。根据这种训练策略,我们的目标检测器采用了一种推理方法,其中高度重叠的预测相互强制。
在我们的方法中,在训练期间,我们在真值 (GT) 框内定义了一个“正区域”,该区域与 GT 框同心且具有相同的形状。我们通过实验 调整 正区域 相对于 GT 框的大小。由于这是一种无锚方法,每个特征(即最终特征图中的位置)预测一个类概率向量 和 边界框坐标。来自 GT 框正区域的类别预测汇集在一起,并作为单个预测对损失做出贡献。由于来自非目标(背景或遮挡)区域的特征的贡献 和 非判别性特征 在训练期间会自动降低权重,因此这种 sum-pool 总和池化 减轻了上述噪声标签问题。在推断时,高度重叠框的类别概率 再次汇集在一起 以获得最终类别概率。我们将我们的方法命名为“PPDet”,它是“prediction pooling detector”的缩写。
我们对这项工作的贡献有两个:
(i) 一种宽松的标签策略,它允许模型在训练过程中减少非判别性特征的贡献,以及
(ii) 一种新的目标检测方法 PPDet,它将这种策略 用于训练 和 基于预测池化的新推理过程。
我们展示了我们的提案在 COCO 数据集上的有效性。 PPDet 优于所有 anchor-free top-down 检测器,并且与其他最先进的方法性能相当。 PPDet 对于检测小目标特别有效(31.4 APS,优于最先进的技术)。
2 Related Work
除了目标检测器的经典一阶段 [6, 14, 16, 21] 与两阶段 [3, 7, 22] 分类之外,我们还可以将当前的方法分为两类:基于锚点和无锚点。
自上而下的无锚目标检测器 通过 消除复杂的 IoU 操作 并专注于识别可能包含对象的区域 来简化训练过程。从这个意义上讲,FCOS [25]、FSAF [33] 和 FoveaBox [10] 首先将 GT 框映射到 FPN 级别,然后 根据它们是否在 GT 框内将位置(即特征)标记为正或负。边界框预测仅适用于正标记的位置。FoveaBox [10] 和 FSAF [33] 为每个对象实例定义了三个区域;正面积、忽略面积和负面积。 FoveaBox 将正(fovea 凹)区域定义为与 GT 框同心的区域,其尺寸按(收缩)因子 0.3 缩放。此正区域内的所有位置都标记为正样本。类似地,使用 0.4 的收缩系数获得另一个区域。该区域之外的任何位置都被标记为负值。如果一个位置既不是正的也不是负的,它在训练过程中被忽略。 FSAF 遵循相同的方法并分别使用收缩因子 0.2 和 0.5。 FCOS 没有像 [10、26、33] 那样预先定义离散区域,而是使用 centerness中心度 分支 根据它们到中心的距离来降低特征的权重。 FCOS 和 FoveaBox 实现 静态的特征金字塔层选择,它们分别根据 GT 框尺度 和 GT 框回归距离 将对象分配到层。与它们不同的是,FSAF 放宽了特征选择步骤,并动态地 将每个目标分配到最合适的特征金字塔层级。
自下而上的无锚目标检测方法 [4、11、17、32] 旨在 检测目标的某些关键点,例如 角点 和 中心。他们的标记策略使用热图heatmaps,从这个意义上说,它与自上而下的无锚方法有很大不同。最近,HoughNet 是一种新颖的、自下而上的基于投票的方法,可以利用近距离和远程证据来检测目标中心,它显示出与主要的单阶段和两阶段自上而下方法相当的性能 [23]。
在基于锚点的方法 [3、14、16、21、22、26、31] 中,目标是从回归锚框预测的。在训练期间,anchor boxes 的标签是根据它与 GT boxes 的交并比 (IoU) 来确定的。不同的检测器使用不同的标准,例如如果 IoU > 0.7,Faster RCNN [22] 将锚标记为正,如果 IoU < 0.3,则标记为负; R-FCN [3]、SSD [16] 和 Retinanet [14] 使用 IoU > 0.5 进行正标记,但负标记的标准略有不同。有两种突出的基于锚点的方法可以直接解决标签问题。 Guided Anchoring [26] 引入了一种新的自适应锚定方案,该方案学习任意形状的框而不是密集和预定义的框。类似于 FSAF [33]、FoveaBox [10] 和我们的方法 PPDet,Guided Anchoring 遵循基于区域的标记 并为每个真值目标定义三种类型的区域;中心区域,忽略区域 和 外部区域,如果生成的锚点位于中心区域内部,则将其标记为正,如果位于外部区域,则标记为负,并忽略其余部分。另一方面,FreeAnchor [31] 将放宽正标签的想法应用于基于锚点的检测器。这是和我们最相似的方法。它用最大似然估计程序取代了手工制作的锚点分配,其中锚点可以自由选择他们的 GT 框。由于 FreeAnchor 正在使用自定义损失函数优化目标锚点匹配,因此它 不能直接应用于无锚点目标检测器。
3 Methods
标签策略和训练。
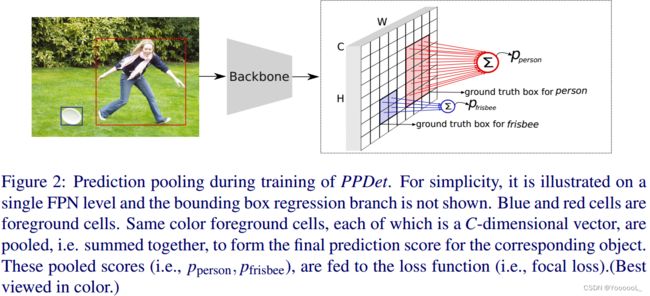
无锚Anchor-free检测器 通过根据 它们的尺度 [10] 或 目标回归距离 [25] 将它们分配到适当的 FPN 级别来限制 GT 框的预测。在这里,我们遵循基于比例的分配策略 [10],因为它是一种自然地将 GT 框与特征金字塔级别相关联的方法。然后,我们为每个 GT 框构建两个不同的区域。我们将“正区域”定义为与 GT 框同心且与 GT 框具有相同形状的区域。我们通过实验设置“正区域”的大小。然后,我们将空间上落在 GT 框“正区域”内的所有位置(即特征)识别为“正(前景)”特征,其余为“负(背景)”特征。每个正特征都被分配给包含它的真值框。在图 2 中,蓝色和红色单元格代表前景单元格,其余(空白或白色)是背景单元格。蓝色单元格分配给飞盘对象,红色单元格分配给人对象。为了获得对象实例的最终检测分数,我们汇集了分配给该对象的所有特征的分类分数,将它们加在一起以获得最终的 C 维向量,其中 C 是类的数量。除了正标记的特征外,所有特征都是负的。每个负特征都会单独影响损失(即没有合并)。这个最终的预测向量被馈送到 焦点Focal损失(FL)。例如,假设 ![]() 表示分配给图 2 中人物对象的红色前景特征。令 y 为人类类别person class。然后,这个特定的对象实例将“
表示分配给图 2 中人物对象的红色前景特征。令 y 为人类类别person class。然后,这个特定的对象实例将“![]() ”贡献给训练中的损失函数。每个对象实例都用一个单独的预测表示。
”贡献给训练中的损失函数。每个对象实例都用一个单独的预测表示。
默认情况下,我们将正特征分配给它们所在框的对象实例。此时,不同 GT 框的交叉区域中的特征分配是一个需要处理的问题。在这种情况下,我们 将这些特征分配给与其中心距离最小的 GT 框。与其他无锚方法 [10、25、32、33] 类似,在我们的模型中,分配给对象的每个前景特征都经过训练以预测其对象 GT 框的坐标。
我们对分类分支使用 focal loss 焦点损失 [14](α = 0.4 和 γ = 1.5),对回归分支使用 平滑 L1 损失 [7]。
Inference.
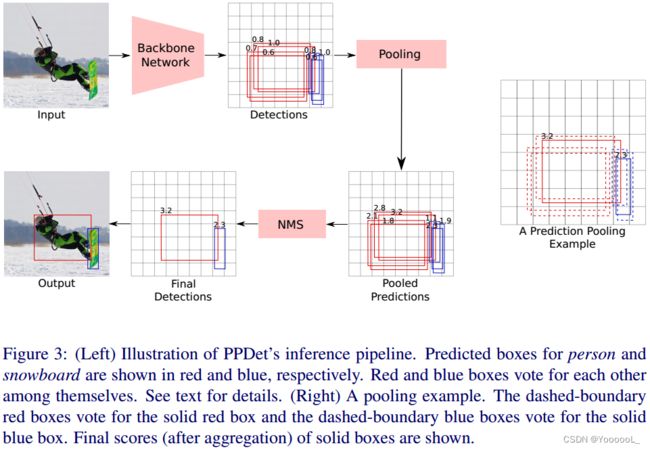
PPDet 的推理管道如图 3 所示。首先,输入图像被馈送到主干神经网络模型(在下一节中描述),该模型产生初始检测集。每个检测都与 (i) 边界框、(ii) 对象类别(选择为具有最大概率的类别)和 (iii) 置信度得分 相关联。在这些检测中,那些标有背景类别的检测被淘汰。我们将此阶段的每个剩余检测视为对其所属对象的投票,其中框是目标位置的假设,置信度分数是投票的强度。接下来,这些检测按如下方式汇集在一起。如果属于同一对象类的两个检测重叠超过一定数量(即交并比(IoU)> 0.6),则我们将它们视为对同一对象的投票,并且每个检测的分数增加了另一个检测的分数的 ![]() 倍,其中 k 是常数。 IoU 越多,增加的幅度越大。将此过程应用于每对检测后,我们获得最终检测的分数。此步骤之后是产生最终检测的类感知非极大值抑制 (NMS) 操作。
倍,其中 k 是常数。 IoU 越多,增加的幅度越大。将此过程应用于每对检测后,我们获得最终检测的分数。此步骤之后是产生最终检测的类感知非极大值抑制 (NMS) 操作。
请注意,尽管推断中使用的预测池化prediction pooling 似乎与训练中使用的pooling不同,但实际上它们是相同的过程。训练中使用的池化 假设正区域中的特征预测的边界框彼此完美重叠(即 IoU = 1)。
网络架构。
PPDet 使用 RetinaNet [14] 的网络模型,它由一个主干卷积神经网络 (CNN) 和一个特征金字塔网络 (FPN) [13] 组成。 FPN 计算多尺度特征表示 并生成五个不同尺度的特征图。每个 FPN 层的顶部有两个独立的并行网络,即分类网络和回归网络。分类网络输出一个 W × H × C 张量,其中 W 和 H 是空间维度(分别是宽度和高度),C 是类别数。类似地,回归网络输出一个 W × H × 4 张量,其中 4 是边界框坐标的数量。我们将这些张量中的每个像素 称为一个特征。
4 Experiments
本节描述了我们为展示我们提出的方法的有效性而进行的实验。首先,我们提出消融实验以找到 GT 框内正区域的最佳相对面积 和 回归损失权重。接下来,我们将在 COCO 数据集上进行几个性能比较。最后,我们提供了样本热图,它显示了负责正确检测的特征的 GT 框相对位置。
实施细节。
我们在 ResNet [9] 和 ResNeXt [28] 之上使用特征金字塔网络 (FPN) [13] 作为我们的主干网络,分别用于消融和最先进的比较。对于所有实验,我们调整图像的大小,使其短边为 800 像素,长边最大为 1300 像素。投票聚合中使用的常量 k(即 ![]() )实验性地设置为 40。我们在 4 个 Tesla V100 GPU 上训练了所有实验,并使用单个 Tesla V100 GPU 进行了测试。我们使用 MMDetection [2] 框架和 Pytorch [20] 来实现我们的模型。
)实验性地设置为 40。我们在 4 个 Tesla V100 GPU 上训练了所有实验,并使用单个 Tesla V100 GPU 进行了测试。我们使用 MMDetection [2] 框架和 Pytorch [20] 来实现我们的模型。
4.1 消融实验
除非另有说明,否则在消融实验中,我们使用具有 FPN 主干的 ResNet-50。他们使用权重衰减为 0.0001 和 动量为 0.9 的随机梯度下降 (SGD) 以 16 的批量大小训练 12 个时期。初始学习率 0.01 在第 8 轮和第 11 轮下降了 10 倍。所有消融模型都在 COCO [12] train2017 数据集上进行训练,并在 val2017 集上进行测试。
“正区域”的大小。
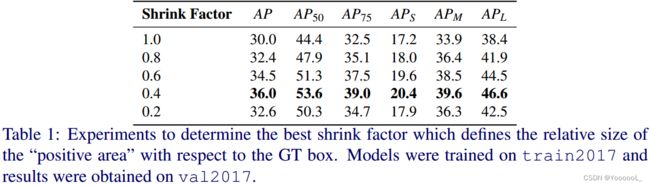
如前所述,我们将“正区域”定义为 与 GT 框同心且与 GT 框具有相同形状的区域。我们通过将其宽度和高度乘以收缩因子来调整此“正区域”的大小。我们试验了 1.0 到 0.2 之间的收缩因子。性能结果如表 1 所示。从收缩因子 1.0 到 0.4,AP 增加,但是,在那之后性能急剧下降。基于这种消融,我们将其余实验的收缩因子设置为 0.4。
回归损失权重
为了找到分类和回归损失之间的最佳平衡,我们对回归损失权重进行了消融实验。如表 2 所示,0.75 产生最佳结果。对于其余实验,我们将回归损失的权重设置为 0.75。

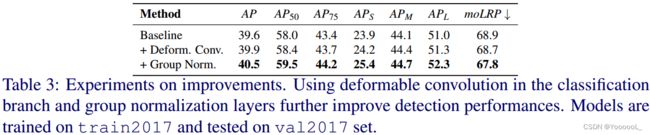
改进。
我们 还采用了其他最先进的目标检测器 [10、25、32] 中使用的改进。首先,我们使用带有 FPN 主干的 ResNet-101 训练我们的基线模型。后来,我们 用可变形卷积层替换了分类分支中类别预测之前的最后一个卷积层。此修改将所有 AP 的性能提高了 0.3 左右(见表 3)。后来,在此修改之上,我们添加了另一个修改,在回归和分类分支中的每个卷积层之后采用组归一化。如表 3 所示,此修改将 AP 提高了 0.6,将 AP50 提高了 1.1。在此表中,我们还提供了最近引入的 moLRP [18] 指标的结果,该指标将定位、精度和召回率结合在一个指标中。值越低越好。使用权重衰减为 0.0001 和动量为 0.9 的随机梯度下降 (SGD),以 16 的批量大小训练模型 24 个时期。初始学习率 0.01 在第 16 轮和第 22 轮下降了 10 倍。我们在最终模型中包含了这两个修改。
类别不平衡。
PPDet 将预测汇总为每个对象实例的单个预测,这减少了训练期间的正样本数。人们可能会认为它进一步加剧了类别不平衡 [19]。为了分析这个问题,我们计算了每张图像的平均正数,PPDet 为 7,FoveBox 为 41,RetinaNet 为 165。 PPDet 大大减少了正样本的数量。然而,与负样本的数量(数万)相比,这仍然很小,因此,它不会加剧现有的类别不平衡问题。我们 使用 焦点损失 来解决不平衡问题。
4.2 最先进的比较
为了将我们的模型与最先进的方法进行比较,我们使用了带有 FPN 的 ResNet-101 和带有 FPN 主干的 ResNeXt-101-64x4d。他们分别使用权重衰减为 0.0001 和动量为 0.9 的 SGD,以 16 和 8 的批量大小分别训练 24 和 16 个时期。对于 ResNet 主干,初始学习率 0.01 在第 16 和 22 轮下降了 10 倍。对于 ResNeXt 主干,初始学习率 0.005 在第 11 和 14 轮下降了 10 倍。模型在 COCO [12] train2017 数据集和在测试开发集上测试。我们使用了(800,480)、(1067,640)、(1333,800)、(1600,960)、(1867,1120)、(2133,1280)个尺度进行多尺度测试。表 4 显示了 PPDet 和几个已建立的最先进检测器的性能。
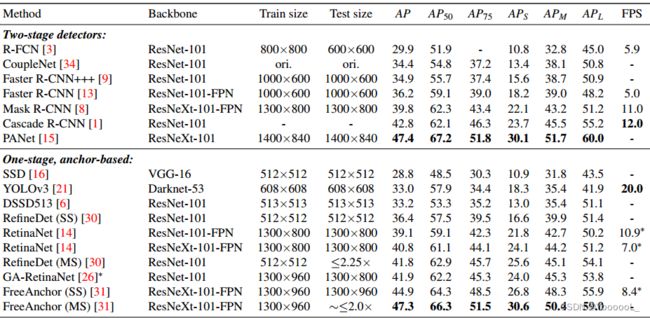
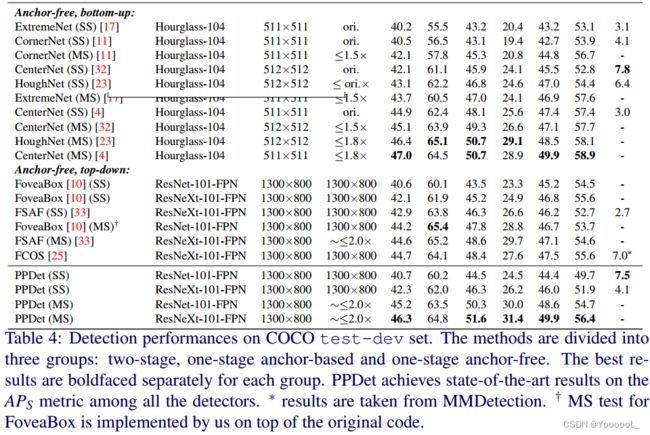 FSAF [33] 和 FoveaBox [10] 使用与我们类似的方法来构建“正区域”。虽然 PPDet 的单尺度测试性能与 FSAF 在具有 FPN 骨干的相同 ResNeXt-101-64x4d 上的性能相当,但 PPDet 的多尺度测试性能比 FSAF 的多尺度测试性能高 1.7 个 AP 点。我们使用单尺度测试的两个模型都比 FoveaBox 获得了更好的结果,同时在小目标上的表现优于它 1.0 以上。我们的多尺度测试结果在具有 FPN 主干的同一 ResNet-101 上优于 FoveaBox 1 个 AP。
FSAF [33] 和 FoveaBox [10] 使用与我们类似的方法来构建“正区域”。虽然 PPDet 的单尺度测试性能与 FSAF 在具有 FPN 骨干的相同 ResNeXt-101-64x4d 上的性能相当,但 PPDet 的多尺度测试性能比 FSAF 的多尺度测试性能高 1.7 个 AP 点。我们使用单尺度测试的两个模型都比 FoveaBox 获得了更好的结果,同时在小目标上的表现优于它 1.0 以上。我们的多尺度测试结果在具有 FPN 主干的同一 ResNet-101 上优于 FoveaBox 1 个 AP。
我们的多尺度性能是所有无锚自上而下方法中最好的。此外,我们在小目标(即 APS)上的多尺度性能在表 4 中的所有检测器中设置了新的最新技术水平。
我们进行了实验来分析 预测池化prediction pooling 对训练和推理的影响。当我们从 ResNet-101-FPN 主干模型的推理管道中 删除 预测池 prediction pooling 时,我们观察到 val2017 集上的 AP 下降了 2.5 个点。为了分析预测池对训练的影响,我们仅在推理期间向 RetinaNet [14] 和 FoveaBox [10] 添加了预测池(因此,训练中没有 PP)。这导致 RetinaNet 和 FoveaBox 的 AP 分别下降了 0.5 和 2.8 分。
我们还进行了另一个实验来测试 sum-pooling 相对于 max-pooling 的有效性。对于最大池化,我们确定了正区域内的特征,其预测框与 GT 框重叠最多。然后,只有这个特征被包含在 focal loss 中,以在训练期间代表它的 GT box。该策略将 AP 降低了 2 个多点,使用 FPN 主干的 ResNet101 产生了 38.4。
作为附加结果,我们展示了 PPDet 在 PASCAL VOC 数据集 [5] 上的性能。对于训练,我们使用了 PASCAL VOC 2007 trainval 和 VOC 2012 trainval 图像的联合集(“07+12”)。为了进行测试,我们使用了 PASCAL VOC 2007 的测试集。当两者都使用 ResNet-50 主干时,我们的 PPDet 模型达到了 77.8 的平均精度 (mAP),优于 FoveaBox [10] 的 76.6 mAP,我们将其视为此处的基线。

图 4 显示了 单元格cell中心 相对于负责检测的真值框 的热图。 RetinaNet 的热图集中在真值对象框的中心。相比之下,PPDet 的最终检测是 由相对更广泛的区域形成的,验证了其在 为正区域的特征 分配权重时的 动态和自动特性。除了来自真值框中心的检测外,它们还可能大量来自真值框的不同部分。
5 Conclusion
在这项工作中,我们引入了一种用于训练无锚目标检测器的新型标记策略。虽然当前的无锚方法在真值框的预定义中心区域内的所有特征上强制使用正标签,但我们的标签策略通过将源自单个特征的预测 sum-pooling总和合并 为单个预测来放宽此约束。这允许模型在训练期间减少非判别性特征的贡献。我们开发了 PPDet,这是一种单阶段无锚目标检测器,它在训练期间采用新的标记策略 和 基于池化预测的新推理方法。我们通过进行几个消融实验来分析我们的想法。我们在 COCO test-dev 上报告了结果,表明 PPDet 的性能与最先进的水平相当,并在小目标上取得了最先进的结果 (APS 31.4)。我们通过可视化检查进一步验证了我们方法的有效性。