两万字深入浅出yolov5+deepsort实现目标跟踪,含完整代码, yolov,卡尔曼滤波估计,ReID目标重识别,匈牙利匹配KM算法匹配
目录
一:前言
二:跟踪部分:
ReID结构编辑
第一帧(生成track)
第二帧
更新先验的预测值
状态矩阵的初始化
对预测值进行更新(矫正):
匹配完成,进行矫正的更新,同时更新state是否超过第三帧,需要置为2变成确认状态:
删除。添加track
第三帧与第二帧一样
第四帧开始(可以做级联匹配)
预测
更新
匹配
级联匹配
真正的级联匹配min_cost_matching
级联匹配函数
通过距离的计算得到最优的匹配结果的索引
ReID特征匹配和运动配
下面进行运动匹配
卡尔曼滤波更新图
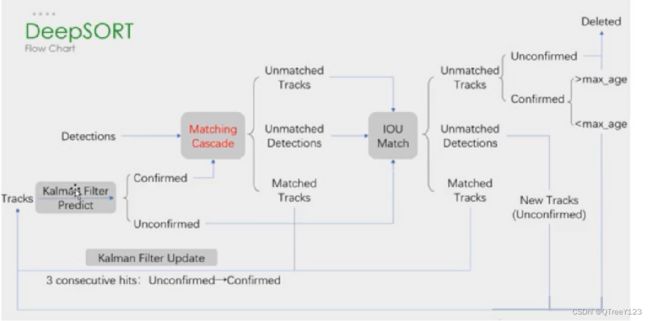
deepsort更新流程
一:前言
上两篇讲了yolov5的训练和检测部分,这一篇在检测的基础上,使用deepsort和ReID和匈牙利算法对目标进行跟踪。
二:跟踪部分:
# pass detections to deepsort,这里的模型是只用了含有人在这一类别的。 im0s存储这一帧所有图片的像素点(第一个是(73,46,3),hwc) # 做了这么多,就是为了得出每个物体的ID保持一致,核心思想:计算并且更新卡尔曼增益代价矩阵,做匹配,返回结果 # 追踪:主要物体检测的好,追踪就不会差
outputs = deepsort.update(xywhs, confss, im0)将得到的xywh和图片的像素值,输入到ReID网络进行人的图像的特征提取
class Extractor(object):
def __init__(self, model_path, use_cuda=True):
self.net = Net(reid=True)
self.device = "cuda" if torch.cuda.is_available() and use_cuda else "cpu"
state_dict = torch.load(model_path, map_location=torch.device(self.device))[
'net_dict']
self.net.load_state_dict(state_dict)
logger = logging.getLogger("root.tracker")
logger.info("Loading weights from {}... Done!".format(model_path))
self.net.to(self.device)
self.size = (64, 128)
self.norm = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225]),
])
def _preprocess(self, im_crops):
"""
TODO:
1. to float with scale from 0 to 1
2. resize to (64, 128) as Market1501 dataset did
3. concatenate to a numpy array
3. to torch Tensor
4. normalize
"""
def _resize(im, size):
return cv2.resize(im.astype(np.float32)/255., size)
im_batch = torch.cat([self.norm(_resize(im, self.size)).unsqueeze(
0) for im in im_crops], dim=0).float()
return im_batch
def __call__(self, im_crops):
im_batch = self._preprocess(im_crops)
with torch.no_grad():
im_batch = im_batch.to(self.device)
features = self.net(im_batch) # 这个网络是detection文件里面的
return features.cpu().numpy()ReID结构
第一帧(生成track)
第一帧只有detection,没有track,所以不会进行预测操作
# update tracker 先计算预测值,然后基于预测值更新参数。例如追踪每一帧的状态肯定要变的,预测完需要根据观测值来修正,修正后的状态值去估计下一帧
self.tracker.predict() # 预测操作:卡尔曼滤波 首先得有track。预测两条公式
self.tracker.update(detections) # 更新3条公式,对匹配后的结果进行更新先_initiate_track计算出mean和协方差,在去Track进行初始化属性,这里是新建track的操作(要添加很多属性),每一帧都是重新append到sel.tracks中。对于新的track,第一帧需要线初始化一个初始值,mean(x(k-1))和误差协方差矩阵(p(k-1))
# 先_initiate_track计算出mean和协方差,在去Track进行初始化属性,这里是新建track的操作(要添加很多属性),每一帧都是重新append到sel.tracks中
for detection_idx in unmatched_detections:
self._initiate_track(detections[detection_idx]) def initiate(self, measurement):
"""Create track from unassociated measurement.
Parameters
----------
measurement : ndarray
Bounding box coordinates (x, y, a, h) with center position (x, y),
aspect ratio a, and height h.
Returns
-------
(ndarray, ndarray)
Returns the mean vector (8 dimensional) and covariance matrix (8x8
dimensional) of the new track. Unobserved velocities are initialized
to 0 mean.
""" # mean是位置信息,各个速度初始化为0;协方差是位置信息之间的关系
mean_pos = measurement
mean_vel = np.zeros_like(mean_pos)
mean = np.r_[mean_pos, mean_vel] # 设定h是因为当目标远近的适合,xya确实变化都不明显,但是h很明显
# 感觉这些变量都跟高度关系比较紧密?高度越小就越远,高度越大就越近?与其当前位置无关
std = [
2 * self._std_weight_position * measurement[3],
2 * self._std_weight_position * measurement[3],
1e-2,
2 * self._std_weight_position * measurement[3],
10 * self._std_weight_velocity * measurement[3],
10 * self._std_weight_velocity * measurement[3],
1e-5,
10 * self._std_weight_velocity * measurement[3]]
covariance = np.diag(np.square(std))
return mean, covariance创建一个新的跟踪轨迹,根据传入的未关联测量值进行初始化。讲这个track的一些变量全部append到自己”身上“去。然后让编号加1,给下一个track继续append
def _initiate_track(self, detection):
# mean是[242, 266.5, 0.63014, 73, 0, 0, 0, 0],目标状态向量被扩展为包含位置 (x, y)、宽高 (a, h) 和速度 (vx, vy),va角度速度vh高度速度的八维向量
# 因此,协方差矩阵的维度也是 8x8,表示状态mean的向量各个维度之间的关联和不确定性。
mean, covariance = self.kf.initiate(detection.to_xyah())
# 第一帧只做了初始化Track类的东西
self.tracks.append(Track(
mean, covariance, self._next_id, self.n_init, self.max_age,
detection.feature))
self._next_id += 1 # 表示当前track的id遍历所有的track,因为这些track不是是已确认的(因为才第一帧,连续三帧才行),
for track in self.tracks:
if not track.is_confirmed():
continue
features += track.features # 已确认目标加入到features列表中
targets += [track.track_id for _ in track.features]
# targets.append(track.track_id)遍历track.features有点奇怪,感觉这样就可以了
# 如果不清空特征列表,而是简单地将当前帧的特征追加到列表中,那么特征列表会越来越长,包含之前帧的特征,这可能会导致不必要的计算和内存消耗。
track.features = []
# 最多100个。将已确认的active_targets 保存特征到self.samples = {}里面,为了级联匹配的计算
self.metric.partial_fit(np.asarray(features), np.asarray(targets), active_targets)第二帧
前面还是跟第一帧一样,先得到目标检测的xywh,置信度,每个目标的像素值,然后利用xywh和每个目标的像素值获得每个目标的特征,后面需要进行重识别
然后先进性预测部分。
self.mean, self.covariance是上一次 的x(k-1)和p(k-1),进行根预测得到先验和先验误差的协方差
self.tracker.predict() # 预测操作:卡尔曼滤波 首先得有track。预测两条公式
def predict(self, kf):
"""Propagate the state distribution to the current time step using a
Kalman filter prediction step.
Parameters
----------
kf : kalman_filter.KalmanFilter
The Kalman filter.
x, y, a, h, vx, vy, va, vh
""" # mean是[242, 266.5, 0.63014, 73, 0, 0, 0, 0],目标状态向量被扩展为包含位置 (x, y)、宽高 (a, h) 和速度 (vx, vy),va角度速度vh高度速度的八维向量
# 因此,协方差矩阵的维度也是 8x8,表示状态mean的向量各个维度之间的关联和不确定性。
# self.mean, self.covariance是上一次 的x(k-1)和p(k-1),进行根预测得到先验和先验误差的协方差
self.mean, self.covariance = kf.predict(self.mean, self.covariance)
self.increment_age()
kf.predict(self.mean, self.covariance)函数 设定h是因为当目标远近的适合,xya确实变化都不明显,但是h很明显,所以下面计算都是基于h来计算的
更新先验的预测值
self.mean, self.covariance ,进行变量更新self.age += 1 self.time_since_update += 1self.age += 1 self.time_since_update += 1
def predict(self, mean, covariance):
"""Run Kalman filter prediction step.
Parameters
----------
mean : ndarray
The 8 dimensional mean vector of the object state at the previous
time step.
covariance : ndarray
The 8x8 dimensional covariance matrix of the object state at the
previous time step.
Returns
-------
(ndarray, ndarray)
Returns the mean vector and covariance matrix of the predicted
state. Unobserved velocities are initialized to 0 mean.
""" # mean[3],:设定h是因为当目标远近的适合,xya确实变化都不明显,但是h很明显,所以下面计算都是基于h来计算的
std_pos = [
self._std_weight_position * mean[3], # _std_weight_position是权重,mean[3]是高度,他们相乘用作测量噪声的标准差,好像只考虑了这个?数学估计没有考虑噪音?
self._std_weight_position * mean[3],
1e-2,
self._std_weight_position * mean[3]]
std_vel = [
self._std_weight_velocity * mean[3],
self._std_weight_velocity * mean[3],
1e-5,
self._std_weight_velocity * mean[3]]
motion_cov = np.diag(np.square(np.r_[std_pos, std_vel])) # 看看那些噪音会影响这个系统的状态,先初始化噪声矩阵Q(也是8*8的矩阵)
mean = np.dot(self._motion_mat, mean) # x' = Fx 得到预测状态(八个量) 用状态转移矩阵*均值得到下一时刻的状态
covariance = np.linalg.multi_dot(( # p' = FPF^T + Q 计算新的协方差矩阵
self._motion_mat, covariance, self._motion_mat.T)) + motion_cov
return mean, covariance # 这样就完成了预测操作状态矩阵的初始化
def __init__(self):
ndim, dt = 4, 1.
# 状态转移矩阵(motion matrix)和观测矩阵(update matrix)
# 在卡尔曼滤波器中,状态转移矩阵描述了系统状态在时间步之间的变化规律。它是一个方阵,其维度与状态向量的维度相同。在这个例子中,self._motion_mat
# 初始状态转移矩阵8*8。每个状态变量都在时间步之间保持不变。在许多实际应用中,一些状态变量可能在短时间内不发生显著变化,而卡尔曼滤波器可以利用这种先验知识来提高状态估计的准确性。
#非线性系统:卡尔曼滤波器最初设计用于线性系统。然而,在处理非线性系统时,通常需要使用扩展卡尔曼滤波器(Extended Kalman Filter,EKF)或其他非线性滤波技术
self._motion_mat = np.eye(2 * ndim, 2 * ndim)
for i in range(ndim):#修改状态转移矩阵的一部分元素
self._motion_mat[i, ndim + i] = dt # 第0行第4列置为1等等....
# 观测矩阵则描述了如何从状态空间中观测到系统的观测值。
self._update_mat = np.eye(ndim, 2 * ndim)
# Motion and observation uncertainty are chosen relative to the current
# state estimate. These weights control the amount of uncertainty in
# the model. This is a bit hacky.
self._std_weight_position = 1. / 20 # 位置的方差
self._std_weight_velocity = 1. / 160 # 速度的方差对预测值进行更新(矫正):
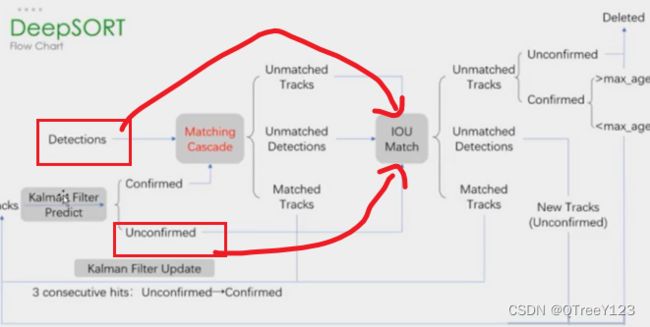
与第一帧不同,第二帧已经有track了,虽然还不能级联匹配,但是可以进行iou的匹配了,因为只有确认的才会进入级联匹配,没确认的会与级联后的一起进行iou,这里没有确认的track进行级联所以只有未被确认的和detection一起做iou、如图
matches_b, unmatched_tracks_b, unmatched_detections = \
linear_assignment.min_cost_matching(
iou_matching.iou_cost, self.max_iou_distance, self.tracks, #第二帧:因为iou_track_candidates是unmatched_detections生成的track,所以第二帧全部都匹配上了,这一点知道就行,不那么zhongyao要
detections, iou_track_candidates, unmatched_detections) # 因为 匈牙利匹配会尽可能的多的去匹配,所以要设置一个最大距离,超过就不要了
# iou_track_candidates里面有些是未被确定的,对于一个新建的track来说:(删除在前三帧中没有匹配到的目标)和unmatched_tracks_a看看是不是超过了70帧,要删除
matches = matches_a + matches_b
unmatched_tracks = list(set(unmatched_tracks_a + unmatched_tracks_b))
return matches, unmatched_tracks, unmatched_detections#unmatched_tracks要么是已被确认但是超过70帧,要么是前三帧没检测到,匹配完成,进行矫正的更新,同时更新state是否超过第三帧,需要置为2变成确认状态:

# 更新当前track的一些变量
for track_idx, detection_idx in matches: # matches是当前跟踪帧和检测帧的匹配结果
self.tracks[track_idx].update(
self.kf, detections[detection_idx])仔细阅读代码,与公式是一样一样的的
def update(self, kf, detection):
"""Perform Kalman filter measurement update step and update the feature
cache.
Parameters
----------
kf : kalman_filter.KalmanFilter
The Kalman filter.
detection : Detection
The associated detection.
"""
# !!!!!更新了当前track的一些变量!!!!!这些值的更新,track的值也跟着更新,怎样才能一步一步往下进行预测
# ************************************************************************
# ************这里的每个变量都是针对一个track而言的。***************************
# ************************************************************************
self.mean, self.covariance = kf.update( # 当前的状态值self.mean, self.covariance,当前的框detection(传感器得到的,或者是观测值)
self.mean, self.covariance, detection.to_xyah())
self.features.append(detection.feature) # 保存这个track的每一帧的特征,以后要对比的,最多存100个,好像没说
self.hits += 1 # 命中次数,每一个track ID都要做在三条公式的更新(他们都有自己的self.hits,)计算自己的帧数是不是到了第三帧了
self.time_since_update = 0 # 清.零表示当前帧是最新的更新帧。,也就是这个目标刚更新过,数值越大表示距离上次更新越久
if self.state == TrackState.Tentative and self.hits >= self._n_init: # self._n_init用来判断当前更新是不是第三帧以上
self.state = TrackState.Confirmed # 是第三帧就改变state标志位kf.update函数
def update(self, mean, covariance, measurement):
"""Run Kalman filter correction step.
Parameters
----------
mean : ndarray
The predicted state's mean vector (8 dimensional).
covariance : ndarray
The state's covariance matrix (8x8 dimensional).
measurement : ndarray
The 4 dimensional measurement vector (x, y, a, h), where (x, y)
is the center position, a the aspect ratio, and h the height of the
bounding box.
Returns
-------
(ndarray, ndarray)
Returns the measurement-corrected state distribution.
"""
projected_mean, projected_cov = self.project(mean, covariance) # 映射:一个是为了计算增益,一个是为了计算新的估计值
# 下面的计算公式,是ppt那边的公式,证明可能公式的由来可能有点难,这里直接拿公式来用
chol_factor, lower = scipy.linalg.cho_factor( # 矩阵分解
projected_cov, lower=True, check_finite=False)
# 卡尔曼增益。卡尔曼增益表示预测状态和观测之间的关系,用于根据观测值来调整预测状态。
kalman_gain = scipy.linalg.cho_solve( # 计算卡尔曼增益
(chol_factor, lower), np.dot(covariance, self._update_mat.T).T,
check_finite=False).T # measurement是传感器的观测值。是更新公式里面的yk,C是projected映射过来的,projected_mean是xk
# 即观测值与预测状态之间的差异
innovation = measurement - projected_mean # y=z-Hx',z为detection的均值向量,不包含速度变化值,
# z=[cx,cy,r,h],H称为测量矩阵,它将track的均值向量x'映射到检测空间,该公式计算detection和track的均值误差。
# 计算出更新后的状态估计(均值向量和协方差矩阵)。
new_mean = mean + np.dot(innovation, kalman_gain.T) # 新的均值向量x=x'+Ky=x'+k(z-Hx') ppt中的公式
new_covariance = covariance - np.linalg.multi_dot(( # 新的协方差向量P=P'-KHK^T
kalman_gain, projected_cov, kalman_gain.T)) #covariance + innovation_cov = projected_cov #HP'H^T+R
# 计算出更新后的状态估计(均值向量和协方差矩阵)。
return new_mean, new_covariance删除。添加track
在第二帧的时候,track刚在第一帧生成,但是在第二帧就没有匹配到检测对象,那就删除。这可能意味着该目标的检测结果不稳定或者系统的初始化不准确。
如果一个跟踪目标在有了track后,但是下一帧没有匹配到任何检测对象,这可能意味着该目标的检测结果不稳定或者系统的初始化不准确。
# 总之,对于一个新建的track来说:(删除在前三帧中没有匹配到的目标)和(连续超过70帧)没有匹配到的目标可以帮助保持目标跟踪系统的准确性、效率和稳定性。
# 如果它是超过了三帧已确认的话,那就只能判断有没有超过70帧了
for track_idx in unmatched_tracks:
self.tracks[track_idx].mark_missed()
def mark_missed(self):
"""Mark this track as missed (no association at the current time step).
"""
# 为什么要判断TrackState.Tentative这个??还不懂,懂了,因为大于3帧的时候state就是2了,然后只能判断是不是70帧都没有进行更新了
if self.state == TrackState.Tentative:
self.state = TrackState.Deleted
elif self.time_since_update > self._max_age:
self.state = TrackState.Deleted还没到第三帧,函数不能进行真正的匹配,不过要将保存下来的track的feature, target进行存储,最多存100个
# 保存特征到self.samples = {}里面,为了级联匹配的计算
def partial_fit(self, features, targets, active_targets):
"""Update the distance metric with new data.
Parameters
----------
features : ndarray
An NxM matrix of N features of dimensionality M.
targets : ndarray
An integer array of associated target identities.
active_targets : List[int]
A list of targets that are currently present in the scene.
example:
假设 self.budget = 3,self.samples[target] 是一个包含 6 个元素的列表 [1, 2, 3, 4, 5, 6]。
如果使用 self.samples[target][-self.budget:],则取出最近的 3 个元素,即 [4, 5, 6]。
如果使用 self.samples[target][:self.budget],则取出最早的 3 个元素,即 [1, 2, 3]。
"""
# 将特征和跟踪目标的ID配对,并将它们存储在字典 self.samples 中。每个目标都对应一个特征列表,其中存储了该目标在不同时间步的特征。
for feature, target in zip(features, targets):
self.samples.setdefault(target, []).append(feature)
if self.budget is not None:
self.samples[target] = self.samples[target][-self.budget:] # 这里才是才是100个,因为一个track存100个512的特征已经很多了
# 只保留与活跃目标相关的特征列表。避免存储过多的无效信息。并以 k 作为键,将 self.samples[k] 的值作为对应的值,构建一个新的字典。
# 这里不是存100个,可以存无限个,上面才是100个,因为一个track存100个512的特征已经很多了
self.samples = {k: self.samples[k] for k in active_targets}第三帧与第二帧一样
第四帧开始(可以做级联匹配)
因为在第三帧的结束阶段,会更新track的一些变量,所以会更新一些变量,包括帧数,上一帧
time_since_update置为0表示上一帧更新过等等
预测
前面的初始化与第一二三帧一样,预测也跟第二帧是一样的,先进行预测先验self.mean, self.covariance ,进行变量更新self.age += 1 self.time_since_update += 1
更新
匹配
matches, unmatched_tracks, unmatched_detections = \
self._match(detections)此时的track在前三帧都有匹配(matches)到的话,就append到confirmed_tracks.append(i)中
# 跟踪对象状态判断 确认还是未确认
confirmed_tracks = []
unconfirmed_tracks = []
for i, t in enumerate(self.tracks):
if t.is_confirmed(): # 一个新建的track,必须经过三次更新才会得到self.state = TrackState.Confirmed,也就是需要三帧
confirmed_tracks.append(i)
else:
unconfirmed_tracks.append(i)级联匹配
self.tracks是这一帧之前的所有self.tracks包括新初始化的,已经超过三帧的,
detections是当前这一帧用yolo检测测量的目标(包括其坐标,置信度,人的特征)
confirmed_tracks是超过三帧的track
# 级联匹配: 将确认的track进行级联匹配,筛选出mathch的
matches_a, unmatched_tracks_a, unmatched_detections = \
linear_assignment.matching_cascade(
gated_metric, self.metric.matching_threshold, self.max_age,
self.tracks, detections, confirmed_tracks)级联匹配:1.外观信息(128维度特征)2.运动信息(基于卡尔曼滤波预测的track的位置)
因为超过70帧后就要删除,所以首先是确保70帧以内的track都可以做级联,比如第65帧没有匹配到检测对象,但是可能第66帧他就能匹配到了,就是这样意思
所以要遍历70次
for level in range(cascade_depth):
if len(unmatched_detections) == 0:
break
# 使得一些可能由于目标形变、遮挡或检测器误检等原因导致匹配困难的目标有更多的机会进行匹配。
track_indices_l = [ #tracks[k].time_since_update == 1是优先遍历上一次更新的了track
k for k in track_indices # tracks就是self.track
if tracks[k].time_since_update == 1 + level
]
# 如果在当前级联匹配的层级中,没有任何跟踪目标需要进行匹配,可以跳过当前层级的匹配过程,继续处理下一个层级的匹配
if len(track_indices_l) == 0:
continue
# ppt第28页。这里只是计算前70帧大家的匹配结果,真正判断是在mark_missed这里判断,反正如果是三帧以上了,以后每次都匹配不到,
# 那么每一帧他都会+1,直到70帧他就会被mark_missed删除的了
matches_l, _, unmatched_detections = \
min_cost_matching(
distance_metric, max_distance, tracks, detections,
track_indices_l, unmatched_detections) # unmatched_detections检测对象,track_indices_l优先遍历的track
matches += matches_l
# 计算未匹配的跟踪目标索引列表 set(track_indices)获取所有跟踪目标索引的集合➖set(k for k, _ in matches)获取已匹配的跟踪目标索引集合
unmatched_tracks = list(set(track_indices) - set(k for k, _ in matches))
# unmatched_tracks表示剩下几个跟踪对象没有匹配成功,unmatched_detections表示剩下几个检测对象没有匹配成功,
# 守门员应该是unmatched_tracks(之前与跟踪结果 ,但后来消失了一会)
return matches, unmatched_tracks, unmatched_detections真正的级联匹配min_cost_matching
先声明:这里面的track是已经确认的了,一定要记住,很重要! tracks是已确认的track,detections是 yolo这一帧的,track_indices_l是优先遍历的track,因为有70个level,帧数丢失越少的越早匹配 ,unmatched_detections检测对象,不知道为什么要叫unmatched_detections,叫matched_detections更好理解点
matches_l, _, unmatched_detections = \
min_cost_matching(
distance_metric, max_distance, tracks, detections,
track_indices_l, unmatched_detections) # unmatched_detections检测对象,track_indices_l优先遍历的track级联匹配函数
拿着卡尔曼滤波估计的值,也就是track的那些每一帧更新的变量,与yolo检测的进行匹配,筛选,通过阈值限制一些无用的目标框,这样做的目的是过滤掉那些与当前状态分布不一致的关联,以提高关联的准确性和可靠性。
构建代价矩阵,我这里第一帧和第二帧都是16,所以是16*16的代价矩阵,在第一步计算级联匹配筛选的时候,distance_metric计算出来的是目标特征向量和检测特征向量之间的距离
mean:状态分布的均值向量(8维)。covariance:状态分布的协方差矩阵(8x8维)。测量值(measurements)only_position:可选参数,如果为True,则仅在计算距离时考虑边界框的中心位置。默认为False。
# #这段代码是一个目标跟踪算法的一部分。它的目的是计算目标和特征之间的相似性度量,并生成一个代价矩阵(cost_matrix),用于表示目标与特征之间的关联代价。
def gated_metric(tracks, dets, track_indices, detection_indices):
# 从检测到的物体中提取特征(features)和目标跟踪器的ID(targets)。特征可以是物体的视觉特征,例如图像中的颜色、纹理、形状等。目标跟踪器的ID是唯一标识跟踪器的值。
features = np.array([dets[i].feature for i in detection_indices])
targets = np.array([tracks[i].track_id for i in track_indices])
# 通过计算目标和特征之间的距离或相似性,可以得到一个初始的关联矩阵,其中较小的值表示更可能的匹配。
# 然后,通过进一步的处理(例如卡尔曼滤波器进行无效化操作),可以对关联进行筛选和调整,以提高匹配的准确性和可靠性。
cost_matrix = self.metric.distance(features, targets)
# 通过调用 linear_assignment.gate_cost_matrix 函数,使用卡尔曼滤波器的状态分布来无效化代价矩阵中的不可行条目
cost_matrix = linear_assignment.gate_cost_matrix(
self.kf, cost_matrix, tracks, dets, track_indices,
detection_indices)
return cost_matrixcost_matrix是通过distance_metric计算得到的iou距离的矩阵(16*16),(使用了1-iou)
第一部分:级联匹配筛选中,大于max_distance(0.2)赋值(马氏距离,大的可以大到100000,小的有0.01左右)为0.20001,就大一点点,第二部分:在iou筛选大于max_distance(0.7)赋值为7.00001,就大一点点
通过距离的计算得到最优的匹配结果的索引
def min_cost_matching(
distance_metric, max_distance, tracks, detections, track_indices=None,
detection_indices=None):
if track_indices is None:
track_indices = np.arange(len(tracks))
if detection_indices is None:
detection_indices = np.arange(len(detections))
# 构建代价矩阵,我这里第一帧和第二帧都是16,所以是16*16的代价矩阵
if len(detection_indices) == 0 or len(track_indices) == 0:
return [], track_indices, detection_indices # Nothing to match.
# 在第一步计算级联匹配筛选的时候,distance_metric计算出来的是目标特征向量和检测特征向量之间的距离。第二部计算iou筛选的时候,
cost_matrix = distance_metric(#cost_matrix是通过distance_metric计算得到的iou距离的矩阵(16*16),(使用了1-iou)
tracks, detections, track_indices, detection_indices)
# 第一部分:级联匹配筛选中,大于max_distance(0.2)赋值(马氏距离,大的可以大到100000,小的有0.01左右)为0.20001,就大一点点,第二部分:在iou筛选大于max_distance(0.7)赋值为7.00001,就大一点点
cost_matrix[cost_matrix > max_distance] = max_distance + 1e-5
# 匈牙利算法或者KM算法匹配:也称为二分图中的最小权重匹配问题,解决最小权重匹配问题,并返回最优分配的行索引和列索引。根据实际问题的要求,你可以选择最小化或最大化目标函数,通过设置参数maximize=True来计算最大权重匹配问题。
row_indices, col_indices = linear_assignment(cost_matrix) # !!!!cost_matrix是一个二维矩阵,表示跟踪结果和检测结果之间的相似性或匹配程度。
行和列分开遍历是为了找到匹配成功和匹配失败的跟踪对象和检测对象。行索引对应跟踪对象,列索引对应检测对象。通过这些索引,可以确定哪些跟踪对象和检测对象成功匹配。
# 遍历检测对象.....行和列分开遍历是为了找到匹配成功和匹配失败的跟踪对象和检测对象。行索引对应跟踪对象,列索引对应检测对象。通过这些索引,可以确定哪些跟踪对象和检测对象成功匹配。
# 假设有15个检测对象,10个跟踪对象 经过匹配算法后其中5个跟踪对象成功匹配到了相应的检测对象,那么现在unmatched_detections就是10
for col, detection_idx in enumerate(detection_indices):
# 如果跟踪目标(好像是状态转移矩阵的出来的)和检测出来对象没有匹配,那么这大概率是个新目标或者上一帧没有被跟踪到的目标。则加入到没有匹配成功的检测对象
# 可能的情况:新目标(因为新目标没有对应的target),跟踪丢失,目标离开视野(跟踪的目标可能在当前帧中已经离开了摄像机的视野范围,因此无法被检测到。)
# 检测器失败(在某些情况下,检测器可能无法正确检测目标,例如目标形变、低分辨率图像或运动模糊等。) 检测器误检
if col not in col_indices:
unmatched_detections.append(detection_idx)
# 那么unmatched_tracks是5
for row, track_idx in enumerate(track_indices):
# 之前跟踪了,但是这次消失的。足球守门员
# 对于跟踪结果没有匹配到任何检测结果的情况,可以理解为检测结果没有与之对应的跟踪结果。在这种情况下,可能发生遮挡、
# 检测器误检、目标离开视野或跟踪器失败等情况,导致检测结果无法与之前的跟踪结果进行匹配。
if row not in row_indices:
unmatched_tracks.append(track_idx)
# 又重新遍历row_indices,col_indices???不是重新遍历了,可能存在误判,第四帧有这种情况,误判后的结果肯定是 大于max_distance的,也要加入unmatched中
for row, col in zip(row_indices, col_indices): # 全都是匹配到了的。而且小于阈值的了
track_idx = track_indices[row]
detection_idx = detection_indices[col]
if cost_matrix[row, col] > max_distance:
unmatched_tracks.append(track_idx) # 这里是行号,好像一定要行号,因为上面构建矩阵的时候已经定死了
unmatched_detections.append(detection_idx) # 这里是列号
else:
matches.append((track_idx, detection_idx)) # 其他符合的,就加入匹配成功matches
# 三个返回值:matches:第二批领导iou(小于0.7的), 如果这里unmatched_detections还有值的话,那就是新目标,需要初始化track
return matches, unmatched_tracks, unmatched_detections级联匹配后,再一次进行iou筛选, 在这里的unmatched_tracks_a,肯定是已确认的track了,这部分跟踪目标是在上一帧中更新过的,
iou_track_candidates里面有未被确定的,对于一个新建的track来说:(删除在前三帧中没有匹配到的目标)和unmatched_tracks_a看看是不是超过了70帧,要删除
不管是距离还是级联后的iou,都会执行min_cost_matching进行筛选,第一部分:级联匹配筛选中,大于max_distance(0.2)赋值(马氏距离,大的可以大到100000,小的有0.01左右)为0.20001,就大一点点,第二部分:在iou筛选大于max_distance(0.7)赋值为7.00001,就大一点点
def min_cost_matching(
distance_metric, max_distance, tracks, detections, track_indices=None,
detection_indices=None):
if track_indices is None:
track_indices = np.arange(len(tracks))
if detection_indices is None:
detection_indices = np.arange(len(detections))
# 构建代价矩阵,我这里第一帧和第二帧都是16,所以是16*16的代价矩阵
if len(detection_indices) == 0 or len(track_indices) == 0:
return [], track_indices, detection_indices # Nothing to match.
# 在第一步计算级联匹配筛选的时候,distance_metric计算出来的是目标特征向量和检测特征向量之间的距离。第二部计算iou筛选的时候,
cost_matrix = distance_metric(#cost_matrix是通过distance_metric计算得到的iou距离的矩阵(16*16),(使用了1-iou)
tracks, detections, track_indices, detection_indices)
# 第一部分:级联匹配筛选中,大于max_distance(0.2)赋值(马氏距离,大的可以大到100000,小的有0.01左右)为0.20001,就大一点点,第二部分:在iou筛选大于max_distance(0.7)赋值为7.00001,就大一点点
cost_matrix[cost_matrix > max_distance] = max_distance + 1e-5
# 匈牙利算法或者KM算法匹配:也称为二分图中的最小权重匹配问题,解决最小权重匹配问题,并返回最优分配的行索引和列索引。根据实际问题的要求,你可以选择最小化或最大化目标函数,通过设置参数maximize=True来计算最大权重匹配问题。
row_indices, col_indices = linear_assignment(cost_matrix) # !!!!cost_matrix是一个二维矩阵,表示跟踪结果和检测结果之间的相似性或匹配程度。
matches, unmatched_tracks, unmatched_detections = [], [], []
# 遍历检测对象.....行和列分开遍历是为了找到匹配成功和匹配失败的跟踪对象和检测对象。行索引对应跟踪对象,列索引对应检测对象。通过这些索引,可以确定哪些跟踪对象和检测对象成功匹配。
# 假设有15个检测对象,10个跟踪对象 经过匹配算法后其中5个跟踪对象成功匹配到了相应的检测对象,那么现在unmatched_detections就是10
for col, detection_idx in enumerate(detection_indices):
# 如果跟踪目标(好像是状态转移矩阵的出来的)和检测出来对象没有匹配,那么这大概率是个新目标或者上一帧没有被跟踪到的目标。则加入到没有匹配成功的检测对象
# 可能的情况:新目标(因为新目标没有对应的target),跟踪丢失,目标离开视野(跟踪的目标可能在当前帧中已经离开了摄像机的视野范围,因此无法被检测到。)
# 检测器失败(在某些情况下,检测器可能无法正确检测目标,例如目标形变、低分辨率图像或运动模糊等。) 检测器误检
if col not in col_indices:
unmatched_detections.append(detection_idx)
# 那么unmatched_tracks是5
for row, track_idx in enumerate(track_indices):
# 之前跟踪了,但是这次消失的。足球守门员
# 对于跟踪结果没有匹配到任何检测结果的情况,可以理解为检测结果没有与之对应的跟踪结果。在这种情况下,可能发生遮挡、
# 检测器误检、目标离开视野或跟踪器失败等情况,导致检测结果无法与之前的跟踪结果进行匹配。
if row not in row_indices:
unmatched_tracks.append(track_idx)
# 又重新遍历row_indices,col_indices???不是重新遍历了,可能存在误判,第四帧有这种情况,误判后的结果肯定是 大于max_distance的,也要加入unmatched中
for row, col in zip(row_indices, col_indices): # 全都是匹配到了的。而且小于阈值的了
track_idx = track_indices[row]
detection_idx = detection_indices[col]
if cost_matrix[row, col] > max_distance:
unmatched_tracks.append(track_idx) # 这里是行号,好像一定要行号,因为上面构建矩阵的时候已经定死了
unmatched_detections.append(detection_idx) # 这里是列号
else:
matches.append((track_idx, detection_idx)) # 其他符合的,就加入匹配成功matches
# 三个返回值:matches:第二批领导iou(小于0.7的), 如果这里unmatched_detections还有值的话,那就是新目标,需要初始化track
return matches, unmatched_tracks, unmatched_detections最终没有被删除的track进行存储features, targets
self.metric.partial_fit(np.asarray(features), np.asarray(targets), active_targets)
这个就是ReID的数据,用来行人重识别
ReID特征匹配和运动配
得到Reid的代价矩阵,但是还不够,还需要运动的匹配 linear_assignment.gate_cost_matrix
def distance(self, features, targets):
cost_matrix = np.zeros((len(targets), len(features)))
for i, target in enumerate(targets):
cost_matrix[i, :] = self._metric(self.samples[target], features)#找到当前目标的target和特征
return cost_matrixdef _nn_cosine_distance(x, y):
# 对特征进行计算余弦相似度,返回离它最近的
distances = _cosine_distance(x, y)
return distances.min(axis=0) def _match(self, detections):
def gated_metric(tracks, dets, track_indices, detection_indices):
# 从检测到的物体中提取特征(features)和目标跟踪器的ID(targets)。特征可以是物体的视觉特征,例如图像中的颜色、纹理、形状等。目标跟踪器的ID是唯一标识跟踪器的值。
features = np.array([dets[i].feature for i in detection_indices])
targets = np.array([tracks[i].track_id for i in track_indices])
#得到Reid的代价矩阵
cost_matrix = self.metric.distance(features, targets)
# 得到特征的代价矩阵再一步进行运动匹配(与估计值与测量值进行匹配)
cost_matrix = linear_assignment.gate_cost_matrix(
self.kf, cost_matrix, tracks, dets, track_indices,
detection_indices)
return cost_matrix下面进行运动匹配
# 这个函数会计算目标跟踪器的状态分布与测量之间的马氏距离(Mahalanobis distance)
def gate_cost_matrix(
kf, cost_matrix, tracks, detections, track_indices, detection_indices,
gated_cost=INFTY_COST, only_position=False):
gating_dim = 2 if only_position else 4
gating_threshold = kalman_filter.chi2inv95[gating_dim]
measurements = np.asarray(
[detections[i].to_xyah() for i in detection_indices])
for row, track_idx in enumerate(track_indices):#对于每一个track都要计算它跟detection之间的
track = tracks[track_idx]
# 计算状态分布与测量之间的马氏距离(Mahalanobis distance)。并将超过门限值的马氏距离对应的代价矩阵条目设置为gated_cost。
# 这样做的目的是过滤掉那些与当前状态分布不一致的关联,以提高关联的准确性和可靠性。
gating_distance = kf.gating_distance( # gating_distance方法用于计算状态分布与一组测量之间的门限距离(gating distance)。
track.mean, track.covariance, measurements, only_position)
cost_matrix[row, gating_distance > gating_threshold] = gated_cost#gating_threshold阈值,
return cost_matrix # 最后,返回经过无效化操作后的代价矩阵,该矩阵将用于进一步的关联和匹配过程。
# mean:状态分布的均值向量(8维)。
# covariance:状态分布的协方差矩阵(8x8维)。
# measurements:包含N个测量值的Nx4维矩阵,每个测量值的格式为(x, y, a, h),其中(x, y)是边界框的中心位置,a是宽高比,h是高度。
# only_position:可选参数,如果为True,则仅在计算距离时考虑边界框的中心位置。默认为False。
通过匈牙利算法后再进行iou筛选
# 匈牙利的门限,因为他会尽可能的匹配多个物体
matches_b, unmatched_tracks_b, unmatched_detections = \
linear_assignment.min_cost_matching(
iou_matching.iou_cost, self.max_iou_distance, self.tracks, #第二帧:因为iou_track_candidates是unmatched_detections生成的track,所以第二帧全部都匹配上了,这一点知道就行,不那么zhongyao要
detections, iou_track_candidates, unmatched_detections) # 因为 匈牙利匹配会尽可能的多的去匹配,所以要设置一个最大距离,超过就不要了
# iou_track_candidates里面有些是未被确定的,对于一个新建的track来说:(删除在前三帧中没有匹配到的目标)和unmatched_tracks_a看看是不是超过了70帧,要删除
matches = matches_a + matches_b
unmatched_tracks = list(set(unmatched_tracks_a + unmatched_tracks_b))
return matches, unmatched_tracks, unmatched_detections#unmatched_tracks要么是已被确认但是超过70帧,要么是前三帧没检测到,卡尔曼滤波更新图

deepsort更新流程