Pytorch/Python计算交并比IOU(IU)代码(批量算IOU)
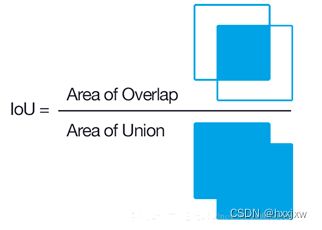
检测准确率用IOU来计算
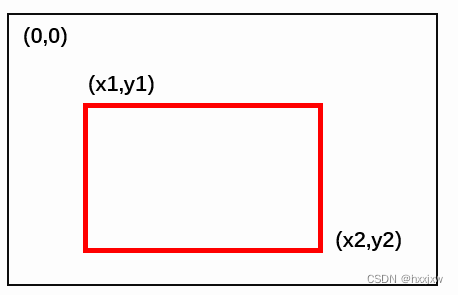
这也是用左上右下两个点坐标来表示矩形
boxA=[x1,y1,x2,y2]
boxB=[x3,y3,x4,y4]
坐标关系是这样的,零点是在左上角的,不是右下角!!
def IOU(boxA, boxB): boxA = [int(x) for x in boxA] boxB = [int(x) for x in boxB] xA = max(boxA[0], boxB[0]) yA = max(boxA[1], boxB[1]) xB = min(boxA[2], boxB[2]) yB = min(boxA[3], boxB[3]) interArea = max(0, xB - xA + 1) * max(0, yB - yA + 1) boxAArea = (boxA[2] - boxA[0] + 1) * (boxA[3] - boxA[1] + 1) boxBArea = (boxB[2] - boxB[0] + 1) * (boxB[3] - boxB[1] + 1) iou = interArea / float(boxAArea + boxBArea - interArea) return iou写法2
输入是这种形式的: [103, 825, 103, 987, 726, 987, 726, 825]
分别是四个点的w和h(先w后h), 即(x1,y1,x2,y2,x3,y3,x4,y4)
import numpy as np import Polygon as plg def get_union(pa, pb): pa_area = pa.area() pb_area = pb.area() return pa_area + pb_area - get_intersection(pa, pb) def get_intersection(pa, pb): pInt = pa & pb if len(pInt) == 0: return 0 else: return pInt.area() a = np.array([103, 825, 103, 987, 726, 987, 726, 825]) b = np.array([101, 828, 731, 828, 731, 996, 101, 996]) poly_a = plg.Polygon(a.reshape(-1, 2)) poly_b = plg.Polygon(b.reshape(-1, 2)) union = get_union(poly_a, poly_b) inter = get_intersection(poly_a, poly_b) IOU = inter / (union + 1e-6) print(IOU)
③如果是与坐标轴平行的举行,可以用torchvision内置的函数
这个函数可以批量算IOU
torchvision.ops.box_iou(boxes1, boxes2)
boxes1 (Tensor[N, 4]) – first set of boxes
boxes2 (Tensor[M, 4]) – second set of boxes
bbox是(x1, y1, x2, y2) 的形式
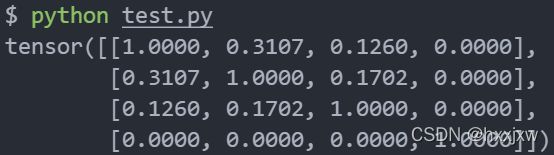
import torch import torchvision a = torch.tensor([[2,3.1,7,5]]) b = torch.tensor([[3,4,8,4.8]]) result = torchvision.ops.box_iou(a,b) print(result)
import torch import torchvision a = torch.tensor([[2,3.1,7,5],[3,4,8,4.8],[4,4,5.6,7],[0.1,0,8,1]]) b = torch.tensor([[2,3.1,7,5],[3,4,8,4.8],[4,4,5.6,7],[0.1,0,8,1]]) result = torchvision.ops.box_iou(a,b) print(result)