【深度学习实验】卷积神经网络(四):自定义二维汇聚层:最大汇聚(max pooling)和平均汇聚(average pooling)
目录
一、实验介绍
二、实验环境
1. 配置虚拟环境
2. 库版本介绍
三、实验内容
0. 导入必要的工具包
1. Conv2D(二维卷积层)
2. Pool2D(二维汇聚层)
理论知识
a. 初始化
b. 前向传播(最大汇聚层)
c. 前向传播(平均汇聚层)
d. 测试
一、实验介绍
本实验实现了一个自定义的二维汇聚层(池化层),包括前向传播中进行最大池化、平均池化等操作。
二、实验环境
本系列实验使用了PyTorch深度学习框架,相关操作如下:
1. 配置虚拟环境
conda create -n DL python=3.7 conda activate DLpip install torch==1.8.1+cu102 torchvision==0.9.1+cu102 torchaudio==0.8.1 -f https://download.pytorch.org/whl/torch_stable.html
conda install matplotlib conda install scikit-learn2. 库版本介绍
| 软件包 | 本实验版本 | 目前最新版 |
| matplotlib | 3.5.3 | 3.8.0 |
| numpy | 1.21.6 | 1.26.0 |
| python | 3.7.16 | |
| scikit-learn | 0.22.1 | 1.3.0 |
| torch | 1.8.1+cu102 | 2.0.1 |
| torchaudio | 0.8.1 | 2.0.2 |
| torchvision | 0.9.1+cu102 | 0.15.2 |
三、实验内容
ChatGPT:
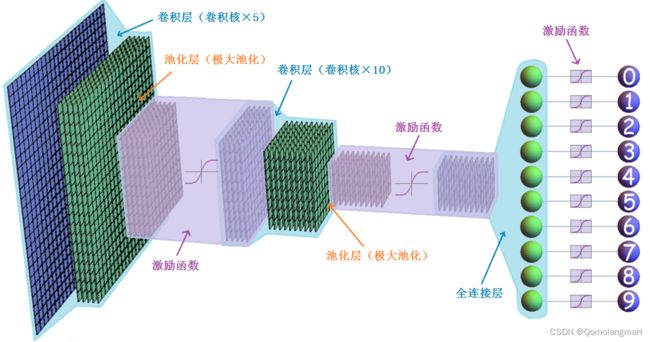
卷积神经网络(Convolutional Neural Network,简称CNN)是一种深度学习模型,广泛应用于图像识别、计算机视觉和模式识别等领域。它的设计灵感来自于生物学中视觉皮层的工作原理。
卷积神经网络通过多个卷积层、池化层和全连接层组成。
- 卷积层主要用于提取图像的局部特征,通过卷积操作和激活函数的处理,可以学习到图像的特征表示。
- 池化层则用于降低特征图的维度,减少参数数量,同时保留主要的特征信息。
- 全连接层则用于将提取到的特征映射到不同类别的概率上,进行分类或回归任务。
卷积神经网络在图像处理方面具有很强的优势,它能够自动学习到具有层次结构的特征表示,并且对平移、缩放和旋转等图像变换具有一定的不变性。这些特点使得卷积神经网络成为图像分类、目标检测、语义分割等任务的首选模型。除了图像处理,卷积神经网络也可以应用于其他领域,如自然语言处理和时间序列分析。通过将文本或时间序列数据转换成二维形式,可以利用卷积神经网络进行相关任务的处理。
0. 导入必要的工具包
import torch
from torch import nn
import torch.nn.functional as F1. Conv2D(二维卷积层)
【深度学习实验】卷积神经网络(三):自定义二维卷积神经网络:步长和填充、输入输出通道_QomolangmaH的博客-CSDN博客 https://blog.csdn.net/m0_63834988/article/details/133313330?spm=1001.2014.3001.5501
https://blog.csdn.net/m0_63834988/article/details/133313330?spm=1001.2014.3001.5501
2. Pool2D(二维汇聚层)
理论知识
汇聚层(池化层)是深度学习中常用的一种操作,其作用是进行特征选择,降低特征数量,从而减少参数数量。
卷积层虽然可以显著减少网络中连接的数量,但特征映射组中的神经元个数并没有显著减少。如果后面接一个分类器,分类器的输入维数依然很高,很容易出现过拟合。
在神经网络的卷积层之后通常会添加汇聚层。汇聚层通过将输入数据划分为不重叠的区域,并在每个区域中选择一个代表性的元素(例如最大值或平均值)来减小空间尺寸。这样可以在保留重要信息的同时,减少冗余和噪声,并提高计算效率。汇聚层的操作是局部的,因此网络可以对图像的平移、旋转和缩放等变换具有一定的不变性。
常见的汇聚层有最大汇聚(max pooling)和平均汇聚(average pooling)。
- 最大汇聚从输入区域中选择最大的元素作为输出;
- 平均汇聚则计算输入区域的平均值作为输出;
- 这些汇聚操作可以在卷积神经网络中的多个层级上进行,以逐渐减小特征图的空间尺寸。
class Pool2D(nn.Module):
def __init__(self, size=(2,2), mode='max', stride=1):
super().__init__()
self.mode = mode
self.h, self.w = size
self.stride = stride
def forward(self, x):
output = torch.zeros((x.shape[0], x.shape[1], (x.shape[2] - self.h + 1)//self.stride, (x.shape[3] - self.w + 1)//self.stride))
for i in range(output.shape[2]):
for j in range(output.shape[3]):
if self.mode == 'max':
output[:, :, i, j] = x[:, :, i*self.stride: i*self.stride + self.w, j*self.stride: j*self.stride + self.h].max()
return outputa. 初始化
size参数用于指定池化窗口的大小,默认为(2, 2),表示池化窗口的高度和宽度都为2。mode参数用于指定池化的模式,默认为'max',表示最大池化操作。也可以选择'average'来进行平均池化操作。stride参数用于指定池化窗口的步幅,默认为1,表示窗口在输入上滑动的间距为1。
b. 前向传播(最大汇聚层)
- 根据输入
x的形状创建一个与池化后输出相同形状的零张量output。 - 使用两个嵌套的循环遍历
output张量的每个空间位置(高度和宽度)。- 在每个位置上,根据池化模式选择不同的操作。
- 如果
self.mode为'max',则使用x张量切片操作获取对应池化窗口区域内的数据,并取最大值作为输出。
- 最后,返回池化后的输出张量
output。
c. 前向传播(平均汇聚层)
只需在forward方法中将池化操作改为计算对应窗口区域内的平均值:
class Pool2D(nn.Module):
def __init__(self, size=(2 ,2), mode='average', stride=1):
super().__init__()
self.mode = mode
self.h, self.w = size
self.stride = stride
def forward(self, x):
output = torch.zeros((x.shape[0], x.shape[1], (x.shape[2] - self.h + 1) // self.stride,
(x.shape[3] - self.w + 1) // self.stride))
for i in range(output.shape[2]):
for j in range(output.shape[3]):
if self.mode == 'max':
output[:, :, i, j] = x[:, :, i* self.stride: i * self.stride + self.w,
j * self.stride: j * self.stride + self.h].max()
elif self.mode == 'average':
output[:, :, i, j] = x[:, :, i * self.stride: i * self.stride + self.w,
j * self.stride: j * self.stride + self.h].mean()
return outputd. 测试
fake_feature = torch.rand((3,2,5,5))
pool = Pool2D()
output = pool(fake_feature)
print(output.shape)输出
torch.Size([3, 2, 4, 4])