空间向量及其运算
平面内任意向量 p \boldsymbol{p} p都可以用两个不共线的向量 a \boldsymbol{a} a b \boldsymbol{b} b来表示,这是平面向量的基本定理。类似的我们定义,如果三个向量不共面,那么对空间中的任一向量 p \boldsymbol{p} p,存在有序实数组 { x , y , z } \{x,y,z\} {x,y,z}使得 p = x a + y b + z c \boldsymbol{p}=x\boldsymbol{a}+y\boldsymbol{b}+z\boldsymbol{c} p=xa+yb+zc,我们把向量 { a , b , c } \{\boldsymbol{a},\boldsymbol{b} ,\boldsymbol{c}\} {a,b,c}叫做空间的一个基底(base), a , b , c \boldsymbol{a},\boldsymbol{b} ,\boldsymbol{c} a,b,c叫做基向量(base vector),如果基向量两两垂直,则称这组基向量为正交向量;如果三个基向量两两垂直且为单位向量,则为单位正交向量。
一、空间直角坐标系
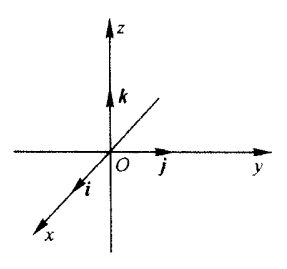
以起点同为 O O O三个单位正交向量 i , j , k \boldsymbol{i},\boldsymbol{j} ,\boldsymbol{k} i,j,k所确定的三个轴依次叫做 x x x轴(横轴), y y y轴(纵轴)和 z z z轴(竖轴),我们把 O x y z Oxyz Oxyz或 [ O ; i , j , k ] [\boldsymbol{O};\boldsymbol{i},\boldsymbol{j},\boldsymbol{k}] [O;i,j,k]四者的组合称为直角坐标系。
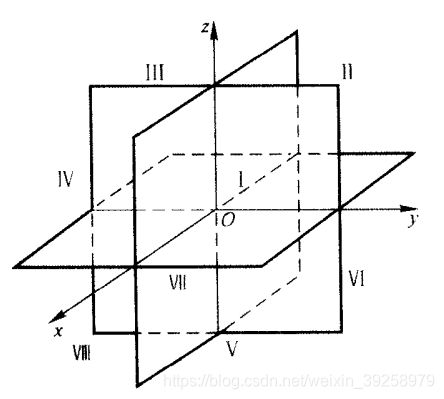
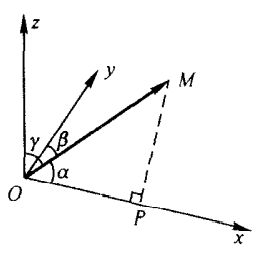
由 x x x和 y y y轴确定的平面叫做 x O y xOy xOy面,同理还有 x O z xOz xOz和 y O z yOz yOz,三个平面将空间划分为八个部分。如下图:
空间中任意一个向量都可以用坐标分解式表示。
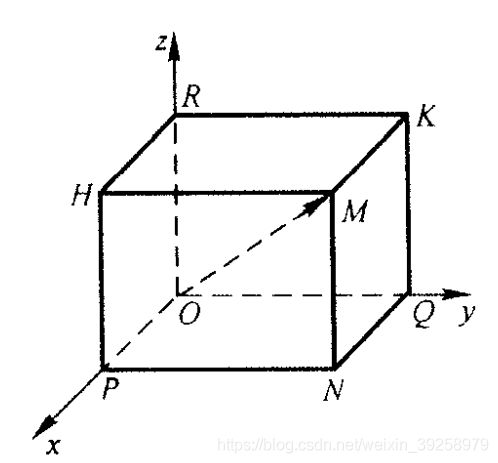
向量 r = O M → = O P → + P N → + N M → = O P → + O Q → + O R → = x i + y j + z k \boldsymbol{r}=\overrightarrow {OM}=\overrightarrow {OP}+\overrightarrow {PN}+\overrightarrow {NM}=\overrightarrow {OP}+\overrightarrow {OQ}+\overrightarrow {OR}=x\boldsymbol{i}+y\boldsymbol{j}+z\boldsymbol{k} r=OM=OP+PN+NM=OP+OQ+OR=xi+yj+zk,这就建立了有序实数组(坐标) ( x , y , z ) (x,y,z) (x,y,z)、空间中向量 r \boldsymbol{r} r和空间中的点 M M M的联系。这些事实使得向量之间的运算与代数建立起了联系(即用数学计算来解决向量之间的关系)。
二、向量的坐标运算
设 a = ( a x , a y , a z ) \boldsymbol{a}=(a_x,a_y,a_z) a=(ax,ay,az), b = ( b x , b y , b z ) \boldsymbol{b}=(b_x,b_y,b_z) b=(bx,by,bz),其对应坐标表示
a = a x i + a y j + a z k b = b x i + b y j + b z k \boldsymbol{a}=a_x\boldsymbol{i}+a_y\boldsymbol{j}+a_z\boldsymbol{k}\quad \boldsymbol{b}=b_x\boldsymbol{i}+b_y\boldsymbol{j}+b_z\boldsymbol{k} a=axi+ayj+azkb=bxi+byj+bzk
2.1 向量线性运算
-
基底形式:
a + b = ( a x ± b x ) i + ( a y ± b y ) j + ( a z ± b z ) k \boldsymbol{a}+\boldsymbol{b}=(a_x\pm b_x)\boldsymbol{i}+(a_y \pm b_y)\boldsymbol{j}+(a_z\pm b_z)\boldsymbol{k} a+b=(ax±bx)i+(ay±by)j+(az±bz)k
λ a = λ a x i + λ a y j + λ a z k \lambda \boldsymbol{a}=\lambda a_x\boldsymbol{i}+\lambda a_y\boldsymbol{j}+\lambda a_z\boldsymbol{k} λa=λaxi+λayj+λazk -
坐标形式:
a + b = ( a x ± b x , a y ± b y , a z ± b z ) \boldsymbol{a}+\boldsymbol{b}=(a_x \pm b_x,a_y \pm b_y,a_z\pm b_z) a+b=(ax±bx,ay±by,az±bz)
λ a = ( λ a x , λ a y , λ a z ) \lambda \boldsymbol{a}=(\lambda a_x,\lambda a_y,\lambda a_z) λa=(λax,λay,λaz)
2.2 向量间的数量积运算
数量积又称点积。设一物体在恒力 F F F作用下沿直线从点 M 1 M_1 M1移动到 M 2 M_2 M2以 s s s表示位移 M 1 M 2 → \overrightarrow {M_1M_2} M1M2,物理学上告诉我们,力 F F F作的功为:
W = ∣ F ∣ ∣ s ∣ c o s θ W=|F||s|cos\theta W=∣F∣∣s∣cosθ
其中 θ \theta θ是 F F F与 s s s的夹角。
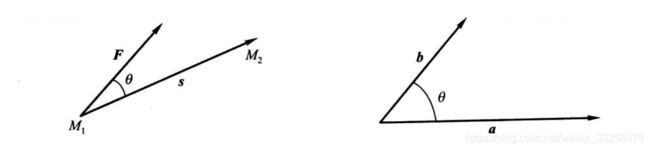
抽象成数学表达:
a ⋅ b = ∣ a ∣ ∣ b ∣ c o s θ \boldsymbol a \cdot \boldsymbol b=|a||b|cos\theta a⋅b=∣a∣∣b∣cosθ
由定义可知:
- a ⋅ a = ∣ a ∣ 2 \boldsymbol a \cdot \boldsymbol a=|a|^2 a⋅a=∣a∣2
- 向量 a ⊥ b \boldsymbol a \bot\boldsymbol b a⊥b的充分必要条件是 a ⋅ b = 0 \boldsymbol a\cdot \boldsymbol b=0 a⋅b=0
满足以下性质:
- 交换律 a ⋅ b \boldsymbol a \cdot \boldsymbol b a⋅b= b ⋅ a \boldsymbol b \cdot \boldsymbol a b⋅a
- 结合律 ( a + b ) ⋅ c = a ⋅ c + b ⋅ c (\boldsymbol a + \boldsymbol b)\cdot\boldsymbol c=\boldsymbol a \cdot \boldsymbol c+\boldsymbol b \cdot \boldsymbol c (a+b)⋅c=a⋅c+b⋅c
PS:向量夹角范围是 [ 0 , π ] [0,\pi] [0,π],所以不存在 a ⋅ b \boldsymbol a \cdot \boldsymbol b a⋅b和 b ⋅ a \boldsymbol b \cdot \boldsymbol a b⋅a夹角不一样的情况,都是一样的 θ \theta θ。优角是大于180度的角,劣角是小于或等于180度的角,因此向量夹角范围是劣角,在谈论向量夹角的时候,应该找小于或等于180度的角。
坐标形式的数量积
a ⋅ b = ( a x b x + a y b y + a z b z ) (1) \boldsymbol{a}\cdot\boldsymbol{b}=(a_xb_x+a_yb_y+a_zb_z)\tag{1} a⋅b=(axbx+ayby+azbz)(1)
2.3 向量积和混合积
- 向量积
a × b = ( a y b z − a z b y , a z b x − a x b z , a x b y − a y b x ) (2) \boldsymbol{a}\times\boldsymbol{b}=(a_yb_z-a_zb_y,a_zb_x-a_xb_z,a_xb_y-a_yb_x)\tag{2} a×b=(aybz−azby,azbx−axbz,axby−aybx)(2) - 混合积
略。
2.4 向量属性
设向量坐标为: r = ( x , y , z ) \boldsymbol{r}=(x,y,z) r=(x,y,z),对应向量形式为: r = x i + y j + z k \boldsymbol{r}=x\boldsymbol{i}+y\boldsymbol{j}+z\boldsymbol{k} r=xi+yj+zk,
-
模(大小)
∣ r ∣ = x 2 + y 2 + z 2 |\boldsymbol{r}|=x^2+y^2+z^2 ∣r∣=x2+y2+z2
设空间中的两点 A A A, B B B,其坐标分别为设 a = ( x 1 , y 1 , z 1 ) \boldsymbol{a}=(x_1,y_1,z_1) a=(x1,y1,z1), b = ( x 1 , y 2 , z 3 ) \boldsymbol{b}=(x_1,y_2,z_3) b=(x1,y2,z3)
根据三角或平行四边形法则, A B → = O B → − O A → = ( x 2 − x 1 , y 2 − y 1 , z 2 − z 1 ) \overrightarrow {AB}=\overrightarrow {OB}-\overrightarrow {OA}=(x_2-x_1,y_2-y_1,z_2-z_1) AB=OB−OA=(x2−x1,y2−y1,z2−z1),其大小为 ∣ A B ∣ = ( x 2 − x 1 ) 2 + ( y 2 − y 1 ) 2 + ( z 2 − z 1 ) 2 |AB|=(x_2-x_1)^2+(y_2-y_1)^2+(z_2-z_1)^2 ∣AB∣=(x2−x1)2+(y2−y1)2+(z2−z1)2 -
方向角和方向余弦
一个非零向量与三个坐标轴的夹角称为向量在坐标系下的方向角,对应的余弦值为方向余弦。三个方向余弦的平方和等于1。换句话说,一个向量在坐标系上有唯一的比例关系:余弦
2.5 向量间的关系
- 平行
当向量 a ≠ 0 \boldsymbol{a} \ne\boldsymbol{0} a=0,向量 a \\ b \boldsymbol{a}\verb|\\|\boldsymbol{b} a\\b相当于 a = λ b \boldsymbol{a}=\lambda\boldsymbol{b} a=λb,坐标表示为:
( b x , b y , b z ) = λ ( a x , a y , a z ) (3) (b_x,b_y,b_z)=\lambda(a_x,a_y,a_z)\tag{3} (bx,by,bz)=λ(ax,ay,az)(3)
或者:
b x a x = b y a y = b z a z (4) \frac{b_x}{a_x}=\frac{b_y}{a_y}=\frac{b_z}{a_z}\tag{4} axbx=ayby=azbz(4)
如果向量 a \boldsymbol{a} a的坐标有一个为零,那么将分式去掉并添加对应 b \boldsymbol{b} b坐标等于零约束。
- 投影(非常重要)
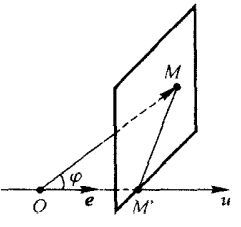
给定一个点 O O O和一个单位向量 e \boldsymbol{e} e可以确定一个延伸至无穷远的数轴 u \boldsymbol u u,在这个空间上任取一个向量记为 O M → = r \overrightarrow{OM}=\boldsymbol{r} OM=r(平移至共起点),过待投影的向量 r \boldsymbol r r终点作一个垂直于数轴 u u u的平面,相交于 M ′ M' M′(M在数轴 u u u的点投影),向量 O M ′ → \overrightarrow{OM'} OM′叫做向量 r \boldsymbol{r} r在 u \boldsymbol u u轴上的分向量。
任何一个在数轴 u u u上的向量都可以在用一个数 λ \lambda λ和同方向的单位向量 e e e表示,如下:
O M ′ → = λ e \overrightarrow{OM'}=\lambda{\boldsymbol{e}} OM′=λe
这个数在数学上被称为向量 r \boldsymbol r r在 u \boldsymbol u u上的向量投影,记作 P r j u r Prj_u\boldsymbol{r} Prjur或 ( r ) u (\boldsymbol{r})_u (r)u。
按照投影的观点,直角坐标系上的一个向量 a \boldsymbol a a在直角坐标系 O x y z Oxyz Oxyz上的坐标为( a x , b x , c x a_x,b_x,c_x ax,bx,cx)就是向量 a \boldsymbol a a在三个坐标轴上的投影,也就是:
a x = P r j x a , a y = P r j y a , a z = P r j z a a_x=Prj_x\boldsymbol a,a_y=Prj_y\boldsymbol a,a_z=Prj_z\boldsymbol a ax=Prjxa,ay=Prjya,az=Prjza
或者你更习惯这种表示方式:
a x = ( a ) x , a y = ( a ) y , a z = ( a ) z a_x=(\boldsymbol a)_x,a_y=(\boldsymbol a)_y,a_z=(\boldsymbol a)_z ax=(a)x,ay=(a)y,az=(a)z
投影有以下性质:
- 性质1 ( a ) u = ∣ a ∣ c o s φ (\boldsymbol a)_u=|a|cos\varphi (a)u=∣a∣cosφ,其中 φ \varphi φ是向量 a \boldsymbol a a与 u \boldsymbol u u轴的夹角;
- 性质2 ( a + b ) u = ( a ) u + ( b ) u (\boldsymbol a+\boldsymbol b)_u=(\boldsymbol a)_u+(\boldsymbol b)_u (a+b)u=(a)u+(b)u;
- 性质3 ( λ a ) u = λ ( a ) u (\lambda \boldsymbol a)_u=\lambda (a)_u (λa)u=λ(a)u