ROS基础知识复习
【置顶】感谢参考:https://zhuanlan.zhihu.com/p/662074088
0.背景
工作一年多没有做 ROS 相关的开发了,最近找工作想做回这一块来,根据参考内容,抽时间给这边的基础知识敲一遍复习一下
1.环境检查
打开了之前的笔记本,Ubuntu 系统及 ros 环境都还在,这边就不做环境配置了
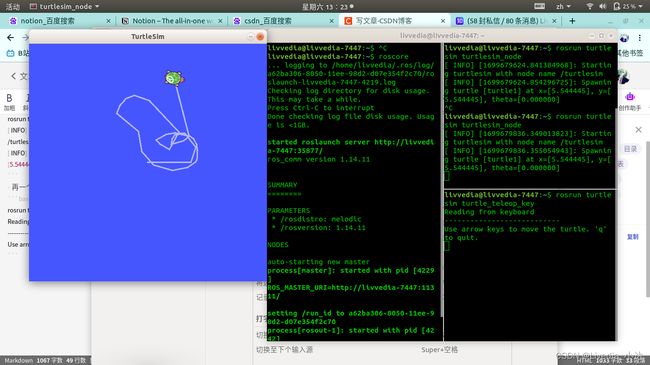
运行一下小乌龟检查一下环境:
- 启动 roscore
roscore
... logging to /home/livvedia/.ros/log/a62ba306-8050-11ee-98d2-d07e354f2c70/roslaunch-livvedia-7447-4219.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://livvedia-7447:35877/
ros_comm version 1.14.11
SUMMARY
========
PARAMETERS
* /rosdistro: melodic
* /rosversion: 1.14.11
NODES
auto-starting new master
process[master]: started with pid [4229]
ROS_MASTER_URI=http://livvedia-7447:11311/
setting /run_id to a62ba306-8050-11ee-98d2-d07e354f2c70
process[rosout-1]: started with pid [4242]
started core service [/rosout]
- 另一个窗口启动小乌龟图像界面节点
rosrun turtlesim turtlesim_node
[ INFO] [1699679624.841384968]: Starting turtlesim with node name /turtlesim
[ INFO] [1699679624.854296725]: Spawning turtle [turtle1] at x=[5.544445], y=[5.544445], theta=[0.000000]
- 再一个窗口启动小乌龟运动控制节点
rosrun turtlesim turtle_teleop_key
Reading from keyboard
---------------------------
Use arrow keys to move the turtle. 'q' to quit.
使用方向键进行控制,上下键用于前进后退,左右键用于转向。
1.常用命令
1.1 rqt_graph 查看节点之间的联系
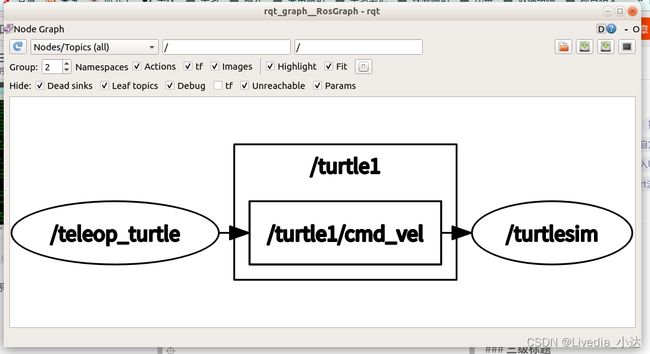
节点 teleop_turtle 发布话题 turtle1/cmd_vel
节点 turtlesim 订阅话题 turtle1/cmd_vel
1.2 rqt_plot 图形化显示话题传输的数据

话题 turtle1/pose 下传输的数据有:
turtle1/pose/x 小乌龟在画面中x坐标
turtle1/pose/y 小乌龟在画面中y坐标
turtle1/pose/theta 小乌龟朝向角
turtle1/pose/linear_velocity 线速度
turtle1/pose/angular_velocity 角速度
1.3 rosnode
- rosnode list 显示当前运行的所有节点信息
rosnode list
/rosout
/teleop_turtle
/turtlesim
- rosnode info /turtlesim 输出turtlesim节点的信息。
rosnode info /turtlesim
--------------------------------------------------------------------------------
Node [/turtlesim]
Publications:
* /rosout [rosgraph_msgs/Log]
* /turtle1/color_sensor [turtlesim/Color]
* /turtle1/pose [turtlesim/Pose]
Subscriptions:
* /turtle1/cmd_vel [geometry_msgs/Twist]
Services:
* /clear
* /kill
* /reset
* /spawn
* /turtle1/set_pen
* /turtle1/teleport_absolute
* /turtle1/teleport_relative
* /turtlesim/get_loggers
* /turtlesim/set_logger_level
contacting node http://livvedia-7447:37143/ ...
Pid: 4691
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound (44969 - 127.0.0.1:43780) [26]
* transport: TCPROS
* topic: /turtle1/cmd_vel
* to: /teleop_turtle (http://livvedia-7447:45971/)
* direction: inbound (41294 - livvedia-7447:55953) [28]
* transport: TCPROS
列出来这个节点发布了哪些话题,订阅了哪些话题,提供了哪些服务,还有当前的一些连接状态等信息
- rosnode ping /turtlesim 测试节点连接 状态
rosnode ping /turtlesim
rosnode: node is [/turtlesim]
pinging /turtlesim with a timeout of 3.0s
xmlrpc reply from http://livvedia-7447:37143/ time=0.617981ms
xmlrpc reply from http://livvedia-7447:37143/ time=0.539064ms
xmlrpc reply from http://livvedia-7447:37143/ time=0.504971ms
xmlrpc reply from http://livvedia-7447:37143/ time=0.994921ms
xmlrpc reply from http://livvedia-7447:37143/ time=0.548124ms
xmlrpc reply from http://livvedia-7447:37143/ time=0.585079ms
xmlrpc reply from http://livvedia-7447:37143/ time=0.546932ms
xmlrpc reply from http://livvedia-7447:37143/ time=0.474930ms
- rosnode machine 列出所有 ros 设备,主从式分布的时候会显示多个设备
rosnode machine
livvedia-7447
当前只有一台设备,设备名为 livvedia-7447 (哈哈哈,我8年前的笔记本)
- rosnode machine 设备名 查看指定设备上的运行节点
rosnode machine livvedia-7447
/rosout
/teleop_turtle
/turtlesim
- rosnode kill /turtlesim 杀死节点 turtlesim
- rosnode cleanup /turtlesim 清空节点 turtlesim
1.4 rostopic
- rostopic list 列出所有在使用的话题
rostopic list
/rosout
/rosout_agg
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose
- rostopic info /turtle1/cmd_vel 查看话题信息
rostopic info /turtle1/cmd_vel
Type: geometry_msgs/Twist
Publishers:
* /teleop_turtle (http://livvedia-7447:45971/)
Subscribers:
* /turtlesim (http://livvedia-7447:37143/)
- rostopic echo /turtle1/cmd_vel 查看话题具体内容
rostopic echo /turtle1/cmd_vel
linear:
x: 2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: -2.0
---
- rostopic pub 话题名 消息类型 消息值 手动发布一个话题消息
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 1.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 1.0
"
publishing and latching message. Press ctrl-C to terminate
可以添加参数 -r 来控制发布的频率,如 -r 1 表示 1 s 发送一次
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 "linear:
x: 1.0
y: 1.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 1.0
"
执行上述发布命令后,小乌龟会自动画圆

1.5 rosservice
- rosservice list 列出所有服务
rosservice list
/clear
/kill
/reset
/rosout/get_loggers
/rosout/set_logger_level
/spawn
/teleop_turtle/get_loggers
/teleop_turtle/set_logger_level
/turtle1/set_pen
/turtle1/teleport_absolute
/turtle1/teleport_relative
/turtlesim/get_loggers
/turtlesim/set_logger_level
- rosservice info /spawn 查看服务 spawn 详细信息
rosservice info /spawn
Node: /turtlesim
URI: rosrpc://livvedia-7447:42833
Type: turtlesim/Spawn
Args: x y theta name
- rosservice call /spawn Args… 手动调用服务 spawn (生成小乌龟)
rosservice call /spawn "x: 10.0
y: 10.0
theta: 0.0
name: "turtle2"
"

右上角生成了个新乌龟 turtle2
注意:输入命令时,要在如x:后加空格,否则会报错。上面的name可以用单引号,也可以用双引号。
1.6 rosmsg
- rosmsg show geometry_msgs/Twist 查看消息 geometry_msgs/Twist 具体定义
rosmsg show geometry_msgs/Twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
- rosmsg packages 列出包含消息的所有包
rosmsg packages
actionlib
actionlib_msgs
actionlib_tutorials
base_local_planner
bond
cartographer_ros_msgs
control_msgs
controller_manager_msgs
costmap_2d
diagnostic_msgs
dynamic_reconfigure
farryn_controller
gazebo_msgs
gazebo_video_monitor_msgs
1.7 rosparam
- rosparam list 列出所有参数
rosparam list
/rosdistro
/roslaunch/uris/host_livvedia_7447__35877
/rosversion
/run_id
/turtlesim/background_b
/turtlesim/background_g
/turtlesim/background_r
- rosparam get /turtlesim/background_r 获取参数 /turtlesim/background_r 的值
- rosparam set /turtlesim/background_r 100 将参数 /turtlesim/background_r 设置为 255,重新启动 turtlesim 节点就好发现背景颜色发生了改变

2.话题通信实现(topic)
- 工作空间准备
mkdir -r ros_review/src/communication
cd ros_review/src
catkin_init_workspace
Creating symlink "/home/livvedia/ros_review/src/CMakeLists.txt" pointing to "/opt/ros/melodic/share/catkin/cmake/toplevel.cmake"
~/ros_review$ tree
.
└── src
├── CMakeLists.txt -> /opt/ros/melodic/share/catkin/cmake/toplevel.cmake
└── communication
自动生成了个 CMakeLists.txt 文件,软链接到 ros 安装目录下的一个 cmake 文件
- 编译工作空间
catkin_make
Base path: /home/livvedia/ros_review
Source space: /home/livvedia/ros_review/src
Build space: /home/livvedia/ros_review/build
Devel space: /home/livvedia/ros_review/devel
Install space: /home/livvedia/ros_review/install
####
#### Running command: "cmake /home/livvedia/ros_review/src -DCATKIN_DEVEL_PREFIX=/home/livvedia/ros_review/devel -DCMAKE_INSTALL_PREFIX=/home/livvedia/ros_review/install -G Unix Makefiles" in "/home/livvedia/ros_review/build"
####
-- The C compiler identification is GNU 7.5.0
-- The CXX compiler identification is GNU 7.5.0
-- Check for working C compiler: /usr/bin/cc
-- Check for working C compiler: /usr/bin/cc -- works
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Detecting C compile features
-- Detecting C compile features - done
-- Check for working CXX compiler: /usr/bin/c++
-- Check for working CXX compiler: /usr/bin/c++ -- works
-- Detecting CXX compiler ABI info
-- Detecting CXX compiler ABI info - done
-- Detecting CXX compile features
-- Detecting CXX compile features - done
-- Using CATKIN_DEVEL_PREFIX: /home/livvedia/ros_review/devel
-- Using CMAKE_PREFIX_PATH: /home/livvedia/car_arm_ws/devel;/home/livvedia/ARM/devel;/home/livvedia/wpr1/devel;/opt/ros/melodic
-- This workspace overlays: /home/livvedia/car_arm_ws/devel;/home/livvedia/ARM/devel;/home/livvedia/wpr1/devel;/opt/ros/melodic
-- Found PythonInterp: /usr/bin/python2 (found suitable version "2.7.17", minimum required is "2")
-- Using PYTHON_EXECUTABLE: /usr/bin/python2
-- Using Debian Python package layout
-- Using empy: /usr/bin/empy
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /home/livvedia/ros_review/build/test_results
-- Found gtest sources under '/usr/src/googletest': gtests will be built
-- Found gmock sources under '/usr/src/googletest': gmock will be built
-- Found PythonInterp: /usr/bin/python2 (found version "2.7.17")
-- Looking for pthread.h
-- Looking for pthread.h - found
-- Looking for pthread_create
-- Looking for pthread_create - not found
-- Looking for pthread_create in pthreads
-- Looking for pthread_create in pthreads - not found
-- Looking for pthread_create in pthread
-- Looking for pthread_create in pthread - found
-- Found Threads: TRUE
-- Using Python nosetests: /usr/bin/nosetests-2.7
-- catkin 0.7.29
-- BUILD_SHARED_LIBS is on
-- BUILD_SHARED_LIBS is on
-- Configuring done
-- Generating done
-- Build files have been written to: /home/livvedia/ros_review/build
####
#### Running command: "make -j4 -l4" in "/home/livvedia/ros_review/build"
####
检查编译后的文件目录
tree
.
├── build
│ ├── atomic_configure
│ │ ├── env.sh
│ │ ├── local_setup.bash
│ │ ├── local_setup.sh
│ │ ├── local_setup.zsh
│ │ ├── setup.bash
│ │ ├── setup.sh
│ │ ├── _setup_util.py
│ │ └── setup.zsh
│ ├── catkin
│ │ └── catkin_generated
│ │ └── version
│ │ └── package.cmake
│ ├── catkin_generated
│ │ ├── env_cached.sh
│ │ ├── generate_cached_setup.py
│ │ ├── installspace
│ │ │ ├── env.sh
│ │ │ ├── local_setup.bash
│ │ │ ├── local_setup.sh
│ │ │ ├── local_setup.zsh
│ │ │ ├── setup.bash
│ │ │ ├── setup.sh
│ │ │ ├── _setup_util.py
│ │ │ └── setup.zsh
│ │ ├── order_packages.cmake
│ │ ├── order_packages.py
│ │ ├── setup_cached.sh
│ │ └── stamps
│ │ └── Project
│ │ ├── interrogate_setup_dot_py.py.stamp
│ │ ├── order_packages.cmake.em.stamp
│ │ ├── package.xml.stamp
│ │ └── _setup_util.py.stamp
│ ├── CATKIN_IGNORE
│ ├── catkin_make.cache
│ ├── CMakeCache.txt
│ ├── CMakeFiles
│ │ ├── 3.10.2
│ │ │ ├── CMakeCCompiler.cmake
│ │ │ ├── CMakeCXXCompiler.cmake
│ │ │ ├── CMakeDetermineCompilerABI_C.bin
│ │ │ ├── CMakeDetermineCompilerABI_CXX.bin
│ │ │ ├── CMakeSystem.cmake
│ │ │ ├── CompilerIdC
│ │ │ │ ├── a.out
│ │ │ │ ├── CMakeCCompilerId.c
│ │ │ │ └── tmp
│ │ │ └── CompilerIdCXX
│ │ │ ├── a.out
│ │ │ ├── CMakeCXXCompilerId.cpp
│ │ │ └── tmp
│ │ ├── clean_test_results.dir
│ │ │ ├── build.make
│ │ │ ├── cmake_clean.cmake
│ │ │ ├── DependInfo.cmake
│ │ │ └── progress.make
│ │ ├── cmake.check_cache
│ │ ├── CMakeDirectoryInformation.cmake
│ │ ├── CMakeError.log
│ │ ├── CMakeOutput.log
│ │ ├── CMakeRuleHashes.txt
│ │ ├── CMakeTmp
│ │ ├── download_extra_data.dir
│ │ │ ├── build.make
│ │ │ ├── cmake_clean.cmake
│ │ │ ├── DependInfo.cmake
│ │ │ └── progress.make
│ │ ├── doxygen.dir
│ │ │ ├── build.make
│ │ │ ├── cmake_clean.cmake
│ │ │ ├── DependInfo.cmake
│ │ │ └── progress.make
│ │ ├── feature_tests.bin
│ │ ├── feature_tests.c
│ │ ├── feature_tests.cxx
│ │ ├── Makefile2
│ │ ├── Makefile.cmake
│ │ ├── progress.marks
│ │ ├── run_tests.dir
│ │ │ ├── build.make
│ │ │ ├── cmake_clean.cmake
│ │ │ ├── DependInfo.cmake
│ │ │ └── progress.make
│ │ ├── TargetDirectories.txt
│ │ └── tests.dir
│ │ ├── build.make
│ │ ├── cmake_clean.cmake
│ │ ├── DependInfo.cmake
│ │ └── progress.make
│ ├── cmake_install.cmake
│ ├── CTestConfiguration.ini
│ ├── CTestCustom.cmake
│ ├── CTestTestfile.cmake
│ ├── gtest
│ │ ├── CMakeFiles
│ │ │ ├── CMakeDirectoryInformation.cmake
│ │ │ └── progress.marks
│ │ ├── cmake_install.cmake
│ │ ├── CTestTestfile.cmake
│ │ ├── googlemock
│ │ │ ├── CMakeFiles
│ │ │ │ ├── CMakeDirectoryInformation.cmake
│ │ │ │ ├── gmock.dir
│ │ │ │ │ ├── __
│ │ │ │ │ │ └── googletest
│ │ │ │ │ │ └── src
│ │ │ │ │ ├── build.make
│ │ │ │ │ ├── cmake_clean.cmake
│ │ │ │ │ ├── DependInfo.cmake
│ │ │ │ │ ├── depend.make
│ │ │ │ │ ├── flags.make
│ │ │ │ │ ├── link.txt
│ │ │ │ │ ├── progress.make
│ │ │ │ │ └── src
│ │ │ │ ├── gmock_main.dir
│ │ │ │ │ ├── __
│ │ │ │ │ │ └── googletest
│ │ │ │ │ │ └── src
│ │ │ │ │ ├── build.make
│ │ │ │ │ ├── cmake_clean.cmake
│ │ │ │ │ ├── DependInfo.cmake
│ │ │ │ │ ├── depend.make
│ │ │ │ │ ├── flags.make
│ │ │ │ │ ├── link.txt
│ │ │ │ │ ├── progress.make
│ │ │ │ │ └── src
│ │ │ │ └── progress.marks
│ │ │ ├── cmake_install.cmake
│ │ │ ├── CTestTestfile.cmake
│ │ │ ├── gtest
│ │ │ │ ├── CMakeFiles
│ │ │ │ │ ├── CMakeDirectoryInformation.cmake
│ │ │ │ │ ├── gtest.dir
│ │ │ │ │ │ ├── build.make
│ │ │ │ │ │ ├── cmake_clean.cmake
│ │ │ │ │ │ ├── DependInfo.cmake
│ │ │ │ │ │ ├── depend.make
│ │ │ │ │ │ ├── flags.make
│ │ │ │ │ │ ├── link.txt
│ │ │ │ │ │ ├── progress.make
│ │ │ │ │ │ └── src
│ │ │ │ │ ├── gtest_main.dir
│ │ │ │ │ │ ├── build.make
│ │ │ │ │ │ ├── cmake_clean.cmake
│ │ │ │ │ │ ├── DependInfo.cmake
│ │ │ │ │ │ ├── depend.make
│ │ │ │ │ │ ├── flags.make
│ │ │ │ │ │ ├── link.txt
│ │ │ │ │ │ ├── progress.make
│ │ │ │ │ │ └── src
│ │ │ │ │ └── progress.marks
│ │ │ │ ├── cmake_install.cmake
│ │ │ │ ├── CTestTestfile.cmake
│ │ │ │ └── Makefile
│ │ │ └── Makefile
│ │ └── Makefile
│ ├── Makefile
│ └── test_results
├── devel
│ ├── cmake.lock
│ ├── env.sh
│ ├── lib
│ ├── local_setup.bash
│ ├── local_setup.sh
│ ├── local_setup.zsh
│ ├── setup.bash
│ ├── setup.sh
│ ├── _setup_util.py
│ └── setup.zsh
└── src
├── CMakeLists.txt -> /opt/ros/melodic/share/catkin/cmake/toplevel.cmake
└── communication
46 directories, 128 files
编译后出现了 build 和 devel 目录
build:编译空间,用来存储工作空间编译过程中产生的中间文件(文件夹里面还有 gtest 这是之前没注意到的)
devel:开发空间,用来保存编译生成的可执行文件
需要将 devel/setup.bash 添加到环境变量中才能在终端中找到这个工作空间中的功能包
两种方式:
(1)在终端中 source 一下这个文件
source ~/ros_review/devel/setup.bash
只对当前终端生效,每次新打开终端的时候都要运行一下
(2)将 source ~/ros_review/devel/setup.bash 其添加到 bashrc 文件中
- 创建功能包
~/ros_review/src$ catkin_create_pkg communication_basic std_msg roscpp rospy
Created file communication_basic/package.xml
Created file communication_basic/CMakeLists.txt
Created folder communication_basic/include/communication_basic
Created folder communication_basic/src
Successfully created files in /home/livvedia/ros_review/src/communication_basic. Please adjust the values in package.xml.
~/ros_review/src$ tree
.
├── CMakeLists.txt -> /opt/ros/melodic/share/catkin/cmake/toplevel.cmake
└── communication_basic
├── CMakeLists.txt
├── include
│ └── communication_basic
├── package.xml
└── src
- 创建消息类型 test.msg
位于新建文件夹 msg 内,内容如下:
cat msg/test_msg.msg
string name
int32 age
int64 score
- 修改 package.xml 中的内容
1
2 <package format="2">
3 <name>communication_basicname>
4 <version>0.0.0version>
5 <description>The communication_basic packagedescription>
6
7
8
9
10 <maintainer email="[email protected]">livvediamaintainer>
11
12
13
14
15
16 <license>TODOlicense>
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40 <build_depend>message_generationbuild_depend>
41
42
43
44
45
46 <exec_depend>message_runtimeexec_depend>
47
48
49
50
51 <buildtool_depend>catkinbuildtool_depend>
52 <build_depend>roscppbuild_depend>
53 <build_depend>rospybuild_depend>
54 <build_depend>std_msgbuild_depend>
55 <build_export_depend>roscppbuild_export_depend>
56 <build_export_depend>rospybuild_export_depend>
57 <build_export_depend>std_msgbuild_export_depend>
58 <exec_depend>roscppexec_depend>
59 <exec_depend>rospyexec_depend>
60 <exec_depend>std_msgexec_depend>
61
62
63
64 <export>
65
66
67 export>
68 package>
将第 40 行 和第 46 行注释去掉
- 修改CMakeLists.txt 文件
(1) find_package() 中加入 message_generation
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msg
message_generation
)
(2)设置运行依赖 catkin_package() 中解除注释并添加 message_runtime
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES communication_basic
CATKIN_DEPENDS roscpp rospy std_msg message_runtime
# DEPENDS system_lib
)
(3)加入新的消息类型
add_message_files(
FILES
test_msg.msg
)
(4)添加生成消息
generate_messages(
DEPENDENCIES
std_msgs # Or other packages containing msgs
)
(4)编译
~/ros_review$ catkin_make
Base path: /home/livvedia/ros_review
Source space: /home/livvedia/ros_review/src
Build space: /home/livvedia/ros_review/build
Devel space: /home/livvedia/ros_review/devel
Install space: /home/livvedia/ros_review/install
####
#### Running command: "make cmake_check_build_system" in "/home/livvedia/ros_review/build"
####
-- Using CATKIN_DEVEL_PREFIX: /home/livvedia/ros_review/devel
-- Using CMAKE_PREFIX_PATH: /home/livvedia/ros_review/devel;/home/livvedia/car_arm_ws/devel;/home/livvedia/ARM/devel;/home/livvedia/wpr1/devel;/opt/ros/melodic
-- This workspace overlays: /home/livvedia/ros_review/devel;/home/livvedia/car_arm_ws/devel;/home/livvedia/ARM/devel;/home/livvedia/wpr1/devel;/opt/ros/melodic
-- Found PythonInterp: /usr/bin/python2 (found suitable version "2.7.17", minimum required is "2")
-- Using PYTHON_EXECUTABLE: /usr/bin/python2
-- Using Debian Python package layout
-- Using empy: /usr/bin/empy
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /home/livvedia/ros_review/build/test_results
-- Found gtest sources under '/usr/src/googletest': gtests will be built
-- Found gmock sources under '/usr/src/googletest': gmock will be built
-- Found PythonInterp: /usr/bin/python2 (found version "2.7.17")
-- Using Python nosetests: /usr/bin/nosetests-2.7
-- catkin 0.7.29
-- BUILD_SHARED_LIBS is on
-- BUILD_SHARED_LIBS is on
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- ~~ traversing 1 packages in topological order:
-- ~~ - communication_basic
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- +++ processing catkin package: 'communication_basic'
-- ==> add_subdirectory(communication_basic)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- communication_basic: 1 messages, 0 services
-- Configuring done
-- Generating done
-- Build files have been written to: /home/livvedia/ros_review/build
####
#### Running command: "make -j4 -l4" in "/home/livvedia/ros_review/build"
####
Scanning dependencies of target _communication_basic_generate_messages_check_deps_test_msg
[ 0%] Built target std_msgs_generate_messages_py
[ 0%] Built target std_msgs_generate_messages_nodejs
[ 0%] Built target std_msgs_generate_messages_cpp
[ 0%] Built target std_msgs_generate_messages_lisp
[ 0%] Built target std_msgs_generate_messages_eus
[ 0%] Built target _communication_basic_generate_messages_check_deps_test_msg
[ 28%] Generating Python from MSG communication_basic/test_msg
[ 28%] Generating Javascript code from communication_basic/test_msg.msg
[ 42%] Generating C++ code from communication_basic/test_msg.msg
[ 57%] Generating Lisp code from communication_basic/test_msg.msg
[ 57%] Built target communication_basic_generate_messages_nodejs
[ 71%] Generating EusLisp code from communication_basic/test_msg.msg
[ 71%] Built target communication_basic_generate_messages_lisp
[ 85%] Built target communication_basic_generate_messages_eus
[100%] Generating Python msg __init__.py for communication_basic
[100%] Built target communication_basic_generate_messages_cpp
[100%] Built target communication_basic_generate_messages_py
[100%] Built target communication_basic_generate_messages
编译后自动生成了 test_msg.h (devel/include/communication_basic 文件夹中)
使用 rosmsg show 可以查看新增的 msg 类型
~/ros_review$ rosmsg show communication_basic/test_msg
string name
int32 age
int64 score
- 编写发布者节点
src/publish_test.cpp 内容如下:
//发布话题: Test_msg
//消息类型为:communication_basic::test_msg
#include - 编写订阅者节点
src/subscriber.cpp 内容如下:
#include "ros/ros.h"
#include"communication_basic/test_msg.h"
void TestCallback(const communication_basic::test_msg & test_msg){
ROS_INFO(" name:[%s]\n", test_msg.name.c_str());
ROS_INFO(" age:[%d]\n", test_msg.age);
ROS_INFO(" score:[%d]\n", test_msg.score);
}
int main(int argc, char** argv){
ros::init(argc, argv,"test_subscriber");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe( "Test_msg", 1000, TestCallback);
ros::spin();
return 0;
}
- 添加目标节点到 CMakeList.txt 文件中
# 第一个参数是生成后的可执行文件名 第二个参数是源文件路径名
add_executable(test_publisher src/publisher.cpp)
# 链接库
target_link_libraries(test_publisher ${catkin_LIBRARIES})
add_executable(test_subscriber src/subscriber.cpp)
target_link_libraries(test_subscriber ${catkin_LIBRARIES})
- 编译节点
~/ros_review$ catkin_make
Base path: /home/livvedia/ros_review
Source space: /home/livvedia/ros_review/src
Build space: /home/livvedia/ros_review/build
Devel space: /home/livvedia/ros_review/devel
Install space: /home/livvedia/ros_review/install
####
#### Running command: "make cmake_check_build_system" in "/home/livvedia/ros_review/build"
####
-- Using CATKIN_DEVEL_PREFIX: /home/livvedia/ros_review/devel
-- Using CMAKE_PREFIX_PATH: /home/livvedia/ros_review/devel;/home/livvedia/car_arm_ws/devel;/home/livvedia/ARM/devel;/home/livvedia/wpr1/devel;/opt/ros/melodic
-- This workspace overlays: /home/livvedia/ros_review/devel;/home/livvedia/car_arm_ws/devel;/home/livvedia/ARM/devel;/home/livvedia/wpr1/devel;/opt/ros/melodic
-- Found PythonInterp: /usr/bin/python2 (found suitable version "2.7.17", minimum required is "2")
-- Using PYTHON_EXECUTABLE: /usr/bin/python2
-- Using Debian Python package layout
-- Using empy: /usr/bin/empy
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /home/livvedia/ros_review/build/test_results
-- Found gtest sources under '/usr/src/googletest': gtests will be built
-- Found gmock sources under '/usr/src/googletest': gmock will be built
-- Found PythonInterp: /usr/bin/python2 (found version "2.7.17")
-- Using Python nosetests: /usr/bin/nosetests-2.7
-- catkin 0.7.29
-- BUILD_SHARED_LIBS is on
-- BUILD_SHARED_LIBS is on
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- ~~ traversing 1 packages in topological order:
-- ~~ - communication_basic
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- +++ processing catkin package: 'communication_basic'
-- ==> add_subdirectory(communication_basic)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- communication_basic: 1 messages, 0 services
-- Configuring done
-- Generating done
-- Build files have been written to: /home/livvedia/ros_review/build
####
#### Running command: "make -j4 -l4" in "/home/livvedia/ros_review/build"
####
[ 0%] Built target std_msgs_generate_messages_cpp
[ 9%] Linking CXX executable /home/livvedia/ros_review/devel/lib/communication_basic/test_subscriber
[ 18%] Linking CXX executable /home/livvedia/ros_review/devel/lib/communication_basic/test_publisher
[ 18%] Built target _communication_basic_generate_messages_check_deps_test_msg
[ 18%] Built target std_msgs_generate_messages_nodejs
[ 18%] Built target std_msgs_generate_messages_lisp
[ 18%] Built target std_msgs_generate_messages_py
[ 18%] Built target std_msgs_generate_messages_eus
[ 27%] Built target communication_basic_generate_messages_cpp
[ 45%] Built target communication_basic_generate_messages_py
[ 54%] Built target communication_basic_generate_messages_nodejs
[ 63%] Built target communication_basic_generate_messages_lisp
[ 81%] Built target communication_basic_generate_messages_eus
[ 81%] Built target communication_basic_generate_messages
[ 90%] Built target test_subscriber
[100%] Built target test_publisher
- 运行测试
三个终端界面:
roscore
rosrun communication_basic test_publisher
rosrun communication_basic te_subscriber
结果如图:

3. 服务通信实现(service)
- 新建服务消息
~/ros_review$ cat src/communication_basic/srv/add.srv
string str1
string str2
int64 a
int64 b
---
string str_sum
- 修改 CMakeList.txt
add_service_files(
FILES
add.srv
)
add_executable(add_server src/add_server.cpp)
target_link_libraries(add_server ${catkin_LIBRARIES})
add_executable(add_client src/add_client.cpp)
target_link_libraries(add_client ${catkin_LIBRARIES})
- 编写测试程序
src/add_server.cpp
#include "ros/ros.h"
#include "communication_basic/add.h"
// service 回调函数 形参数据类型是固定的用引用
bool add( communication_basic::add::Request& req, communication_basic::add::Response & resp){
resp.str_sum = req.str1+req.str2;
resp.sum = req.a+req.b;
ROS_INFO("request: a=%d, b=%d, str1=%s, str2=%s", req.a,req.b,req.str1.c_str(),req.str2.c_str());
ROS_INFO("sending back response: sum=%d, str_sum=%s", resp.sum, resp.str_sum.c_str());
return true;
}
int main(int argc, char**argv){
// ROS 节点初始化
ros::init(argc,argv,"add_server");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个名为 add 的 server ,注册回调函数 add()
ros::ServiceServer service = n.advertiseService("add", add);
// 循环等待回调函数
ROS_INFO("add server is ok");
ros::spin();
return 0;
}
src/add_client.cpp
#include "ros/ros.h"
#include "communication_basic/add.h"
int main(int argc,char** argv){
// 从终端获取两个数字和两个字符串
if(argc != 5){
ROS_INFO("usage: please input 4 params(2 number 2 string), params size is:%d",argc);
return 1;
}
//ROS 节点初始化
ros::init(argc,argv,"add_client");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个 client, 请求 add server
ros::ServiceClient client = n.serviceClient<communication_basic::add>("add");
// 创建消息
communication_basic::add test_msg;
test_msg.request.a=atoll(argv[1]);
test_msg.request.b=atoll(argv[2]);
test_msg.request.str1=argv[3];
test_msg.request.str2=argv[4];
// 发布 service 请求,等待加法运算的返回结果
if(client.call(test_msg)){
ROS_INFO("response: sum is:%d, sum_str is:%s", test_msg.response.sum, test_msg.response.str_sum.c_str());
} else{
ROS_ERROR("Failed to call service add");
return 1;
}
return 0;
}
- 编译代码
~/ros_review$ catkin_make
Base path: /home/livvedia/ros_review
Source space: /home/livvedia/ros_review/src
Build space: /home/livvedia/ros_review/build
Devel space: /home/livvedia/ros_review/devel
Install space: /home/livvedia/ros_review/install
####
#### Running command: "make cmake_check_build_system" in "/home/livvedia/ros_review/build"
####
####
#### Running command: "make -j4 -l4" in "/home/livvedia/ros_review/build"
####
[ 0%] Built target std_msgs_generate_messages_py
[ 0%] Built target _communication_basic_generate_messages_check_deps_add
[ 0%] Built target std_msgs_generate_messages_cpp
[ 0%] Built target _communication_basic_generate_messages_check_deps_test_msg
[ 0%] Built target std_msgs_generate_messages_eus
[ 0%] Built target std_msgs_generate_messages_lisp
[ 9%] Built target test_publisher
[ 19%] Built target test_subscriber
Scanning dependencies of target add_client
Scanning dependencies of target add_server
[ 23%] Building CXX object communication_basic/CMakeFiles/add_client.dir/src/add_client.cpp.o
[ 28%] Building CXX object communication_basic/CMakeFiles/add_server.dir/src/add_server.cpp.o
[ 47%] Built target communication_basic_generate_messages_py
[ 57%] Built target communication_basic_generate_messages_cpp
[ 57%] Built target std_msgs_generate_messages_nodejs
[ 71%] Built target communication_basic_generate_messages_eus
[ 80%] Built target communication_basic_generate_messages_nodejs
[ 90%] Built target communication_basic_generate_messages_lisp
[ 90%] Built target communication_basic_generate_messages
In file included from /opt/ros/melodic/include/ros/ros.h:40:0,
from /home/livvedia/ros_review/src/communication_basic/src/add_server.cpp:1:
/home/livvedia/ros_review/src/communication_basic/src/add_server.cpp: In function ‘bool add(communication_basic::add::Request&, communication_basic::add::Response&)’:
/opt/ros/melodic/include/ros/console.h:348:176: warning: format ‘%d’ expects argument of type ‘int’, but argument 8 has type ‘communication_basic::addRequest_<std::allocator<void> >::_a_type {aka long int}’ [-Wformat=]
location__loc.level_, __FILE__, __LINE__, __ROSCONSOLE_FUNCTION__, __VA_ARGS__)
^
/opt/ros/melodic/include/ros/console.h:351:5: note: in expansion of macro ‘ROSCONSOLE_PRINT_AT_LOCATION_WITH_FILTER’
ROSCONSOLE_PRINT_AT_LOCATION_WITH_FILTER(NULL, __VA_ARGS__)
^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
/opt/ros/melodic/include/ros/console.h:387:7: note: in expansion of macro ‘ROSCONSOLE_PRINT_AT_LOCATION’
ROSCONSOLE_PRINT_AT_LOCATION(__VA_ARGS__); \
^~~~~~~~~~~~~~~~~~~~~~~~~~~~
/opt/ros/melodic/include/ros/console.h:572:35: note: in expansion of macro ‘ROS_LOG_COND’
#define ROS_LOG(level, name, ...) ROS_LOG_COND(true, level, name, __VA_ARGS__)
^~~~~~~~~~~~
/opt/ros/melodic/include/rosconsole/macros_generated.h:110:23: note: in expansion of macro ‘ROS_LOG’
#define ROS_INFO(...) ROS_LOG(::ros::console::levels::Info, ROSCONSOLE_DEFAULT_NAME, __VA_ARGS__)
^~~~~~~
/home/livvedia/ros_review/src/communication_basic/src/add_server.cpp:9:5: note: in expansion of macro ‘ROS_INFO’
ROS_INFO("request: a=%d, b=%d, str1=%s, str2=%s", req.a,req.b,req.str1.c_str(),req.str2.c_str());
^~~~~~~~
/opt/ros/melodic/include/ros/console.h:348:176: warning: format ‘%d’ expects argument of type ‘int’, but argument 9 has type ‘communication_basic::addRequest_<std::allocator<void> >::_b_type {aka long int}’ [-Wformat=]
location__loc.level_, __FILE__, __LINE__, __ROSCONSOLE_FUNCTION__, __VA_ARGS__)
^
/opt/ros/melodic/include/ros/console.h:351:5: note: in expansion of macro ‘ROSCONSOLE_PRINT_AT_LOCATION_WITH_FILTER’
ROSCONSOLE_PRINT_AT_LOCATION_WITH_FILTER(NULL, __VA_ARGS__)
^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
/opt/ros/melodic/include/ros/console.h:387:7: note: in expansion of macro ‘ROSCONSOLE_PRINT_AT_LOCATION’
ROSCONSOLE_PRINT_AT_LOCATION(__VA_ARGS__); \
^~~~~~~~~~~~~~~~~~~~~~~~~~~~
/opt/ros/melodic/include/ros/console.h:572:35: note: in expansion of macro ‘ROS_LOG_COND’
#define ROS_LOG(level, name, ...) ROS_LOG_COND(true, level, name, __VA_ARGS__)
^~~~~~~~~~~~
/opt/ros/melodic/include/rosconsole/macros_generated.h:110:23: note: in expansion of macro ‘ROS_LOG’
#define ROS_INFO(...) ROS_LOG(::ros::console::levels::Info, ROSCONSOLE_DEFAULT_NAME, __VA_ARGS__)
^~~~~~~
/home/livvedia/ros_review/src/communication_basic/src/add_server.cpp:9:5: note: in expansion of macro ‘ROS_INFO’
ROS_INFO("request: a=%d, b=%d, str1=%s, str2=%s", req.a,req.b,req.str1.c_str(),req.str2.c_str());
^~~~~~~~
/opt/ros/melodic/include/ros/console.h:348:176: warning: format ‘%d’ expects argument of type ‘int’, but argument 8 has type ‘communication_basic::addResponse_<std::allocator<void> >::_sum_type {aka long int}’ [-Wformat=]
location__loc.level_, __FILE__, __LINE__, __ROSCONSOLE_FUNCTION__, __VA_ARGS__)
^
/opt/ros/melodic/include/ros/console.h:351:5: note: in expansion of macro ‘ROSCONSOLE_PRINT_AT_LOCATION_WITH_FILTER’
ROSCONSOLE_PRINT_AT_LOCATION_WITH_FILTER(NULL, __VA_ARGS__)
^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
/opt/ros/melodic/include/ros/console.h:387:7: note: in expansion of macro ‘ROSCONSOLE_PRINT_AT_LOCATION’
ROSCONSOLE_PRINT_AT_LOCATION(__VA_ARGS__); \
^~~~~~~~~~~~~~~~~~~~~~~~~~~~
/opt/ros/melodic/include/ros/console.h:572:35: note: in expansion of macro ‘ROS_LOG_COND’
#define ROS_LOG(level, name, ...) ROS_LOG_COND(true, level, name, __VA_ARGS__)
^~~~~~~~~~~~
/opt/ros/melodic/include/rosconsole/macros_generated.h:110:23: note: in expansion of macro ‘ROS_LOG’
#define ROS_INFO(...) ROS_LOG(::ros::console::levels::Info, ROSCONSOLE_DEFAULT_NAME, __VA_ARGS__)
^~~~~~~
/home/livvedia/ros_review/src/communication_basic/src/add_server.cpp:10:5: note: in expansion of macro ‘ROS_INFO’
ROS_INFO("sending back response: sum=%d, str_sum=%s", resp.sum, resp.str_sum.c_str());
^~~~~~~~
In file included from /opt/ros/melodic/include/ros/ros.h:40:0,
from /home/livvedia/ros_review/src/communication_basic/src/add_client.cpp:1:
/home/livvedia/ros_review/src/communication_basic/src/add_client.cpp: In function ‘int main(int, char**)’:
/opt/ros/melodic/include/ros/console.h:348:176: warning: format ‘%d’ expects argument of type ‘int’, but argument 8 has type ‘communication_basic::addResponse_<std::allocator<void> >::_sum_type {aka long int}’ [-Wformat=]
::ros::console::print(filter, __rosconsole_define_location__loc.logger_, __rosconsole_define_location__loc.level_, __FILE__, __LINE__, __ROSCONSOLE_FUNCTION__, __VA_ARGS__)
^
/opt/ros/melodic/include/ros/console.h:351:5: note: in expansion of macro ‘ROSCONSOLE_PRINT_AT_LOCATION_WITH_FILTER’
ROSCONSOLE_PRINT_AT_LOCATION_WITH_FILTER(NULL, __VA_ARGS__)
^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
/opt/ros/melodic/include/ros/console.h:387:7: note: in expansion of macro ‘ROSCONSOLE_PRINT_AT_LOCATION’
ROSCONSOLE_PRINT_AT_LOCATION(__VA_ARGS__); \
^~~~~~~~~~~~~~~~~~~~~~~~~~~~
/opt/ros/melodic/include/ros/console.h:572:35: note: in expansion of macro ‘ROS_LOG_COND’
#define ROS_LOG(level, name, ...) ROS_LOG_COND(true, level, name, __VA_ARGS__)
^~~~~~~~~~~~
/opt/ros/melodic/include/rosconsole/macros_generated.h:110:23: note: in expansion of macro ‘ROS_LOG’
#define ROS_INFO(...) ROS_LOG(::ros::console::levels::Info, ROSCONSOLE_DEFAULT_NAME, __VA_ARGS__)
^~~~~~~
/home/livvedia/ros_review/src/communication_basic/src/add_client.cpp:30:9: note: in expansion of macro ‘ROS_INFO’
ROS_INFO("response: sum is:%d, sum_str is:%s", test_msg.response.sum, test_msg.response.str_sum.c_str());
^~~~~~~~
[ 95%] Linking CXX executable /home/livvedia/ros_review/devel/lib/communication_basic/add_client
[100%] Linking CXX executable /home/livvedia/ros_review/devel/lib/communication_basic/add_server
[100%] Built target add_client
[100%] Built target add_server
- 测试
三个终端界面:
roscore
rosrun communication_basic add_server
[ INFO] [1699810722.572002386]: add server is ok
rosrun communication_basic add_client 1 2 ab cd
[ INFO] [1699810740.389112254]: response: sum is:3, sum_str is:abcd