计算机视觉的应用17-利用CrowdCountNet模型解决人群数量计算问题(pytorch搭建模型)
大家好,我是微学AI,今天给大家介绍一下计算机视觉的应用17-利用CrowdCountNet模型解决人群数量计算问题(pytorch搭建模型)。本篇文章,我将向大家展示如何使用CrowdCountNet这个神奇的工具,以及它是如何利用深度学习技术来解决复杂的人群计数问题。让我们一起进入这个充满活力和创新的世界,开启图像和视频中人群数量计算的新篇章!
目录
- 项目介绍
- 应用场景
- 人流监测和管理
- 安全防控
- 市场调研和决策支持
- 城市规划和交通管理
- 实战项目
- 数据准备
- 模型构建
- 模型训练
- 图片检测人群数量
- 视频检测人群数量
- 结论
1. 项目介绍
本文我将利用深度神经网络来解决一个现实中普遍存在的问题:如何准确计算图像和视频中的人群数量。当您走进拥挤的城市街头或繁忙的公共场所时,人群数量经常让人难以置信。然而,现在有了深度学习模型的帮助,我们可以轻松地通过计算机视觉来解决这个挑战。
CrowdCountNet是我们的主角,它是一种被广泛应用于图像识别和处理领域的深度学习模型。它背后的原理十分精巧,利用了神经网络的强大能力来理解和分析图像中的人群分布。这个模型通过学习大量的图像数据,自动捕捉到了各种人群密集度的模式和特征。
想象一下,当你看着一张摄像头拍摄的城市街景时,CrowdCountNet正在忙碌地工作着。它会逐像素地扫描整个图像,并识别每个像素点上是否存在人群。从细微的行人到人群聚集的区域,CrowdCountNet都能准确地捕捉到每个人的存在。
使用这个强大的深度学习模型,我们可以实现许多令人惊叹的功能。无论是为城市规划提供人流热图、帮助安保人员监控拥挤场所,还是为交通管理提供实时的交通流量信息,CrowdCountNet都能在不同领域发挥巨大作用。
2. 应用场景
2.1 人流监测和管理
在公共场所,例如商场、机场、火车站等,监测和管理人流量是至关重要的。我们的模型可以用于实时监测人流量,帮助管理者做出更有效的决策,比如调整人流方向,预防拥挤等。
在一个繁忙的购物中心,通过我们的人流监测系统,可以实时显示各个商店的人流量。商场管理员可以在控制中心的大屏幕上看到不同区域的人流状况,比如一楼的时尚区人流量饱和,而二楼的电子产品区人流相对稀少。管理员立即作出反应,调整楼梯和电梯的方向,引导顾客流向较空闲的区域,以缓解拥挤。
2.2 安全防控
在大型活动或集会中,通过实时监测人群数量,可以预防和控制安全事故的发生,及时制定疏散计划,提高人员安全。
想象一个音乐节现场,数以万计的观众聚集在一个开放的场地上。通过我们的人流监测系统,主办方能够实时获得观众的数量和密度数据。突然,系统发出警报,显示某个区域的人流超过了安全限制。主办方立刻启动紧急预案,引导人群有序撤离,避免发生踩踏事故。
2.3 市场调研和决策支持
商家可以通过监测店铺或某个区域的人流量,来评估其营销策略的效果,或者进行更准确的市场调研。
一家新开业的百货公司想要评估其广告宣传效果和吸引力。通过人流监测系统,他们可以统计每天进入商场的人数,并与营销活动的时间和内容进行对比。他们发现,当进行打折促销时,入场人数骤增,而在没有促销的日子里,人流量相对稀少。这为他们提供了有价值的市场调研数据,帮助他们更准确地评估促销策略的成效。
2.4 城市规划和交通管理
在城市规划和交通管理中,通过人群数量的监测,可以更好地理解和预测城市中的人流动态,从而更科学地进行城市规划和交通管理。
想象一座拥挤的大都市,上班高峰期大批人涌入地铁站。通过我们的人流监测系统,地铁管理部门可以实时了解不同地铁站的客流情况,并根据需求增加或减少列车班次。当一个地铁站即将达到容纳上限时,系统会自动发出警报,引导乘客选择其他线路或利用公共交通换乘,以减少人流压力。
2.5 相册与毕业生人数统计
通常毕业合影中有大批的人一起合作,我们要统计人数的话,基本都是人工去一个一个数出来,这样费时费力。现在利用模型直接统计合照人数,统计合照人数,判断是否学生来齐了。
3. 实战项目
在这个项目中,我们将首先讨论如何准备数据,然后构建和训练我们的模型,并最后使用我们的模型来检测人群数量。
3.1 数据准备
首先,我们需要准备一个包含大量标注人群数量的图像数据集。这可以是公开的人群数量数据集,也可以是自己收集并标注的数据集。
3.2 模型构建
然后,我们需要构建一个CrowdCountNet模型来学习如何从图像中预测人群数量。
import torch.nn as nn
import torch
import torch.nn.functional as F
from torch.autograd import Variable
from torch.nn.utils.weight_norm import weight_norm
import math
from collections import OrderedDict
class CrowdCountNet(nn.Module):
def __init__(self,
leaky_relu=False,
attn_weight=1,
fix_domain=1,
domain_center_model='',
**kwargs):
super(CrowdCountNet, self).__init__()
self.criterion_attn = torch.nn.MSELoss(reduction='sum')
self.domain_center_model = domain_center_model
self.attn_weight = attn_weight
self.fix_domain = fix_domain
self.cosine = 1
self.conv1 = nn.Conv2d(
3, 64, kernel_size=3, stride=2, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(64, momentum=BN_MOMENTUM)
self.conv2 = nn.Conv2d(
64, 64, kernel_size=3, stride=2, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(64, momentum=BN_MOMENTUM)
self.relu = nn.ReLU(inplace=True)
num_channels = 64
block = blocks_dict['BOTTLENECK']
num_blocks = 4
self.layer1 = self._make_layer(block, 64, num_channels, num_blocks)
stage1_out_channel = block.expansion * num_channels
# -- stage 2
self.stage2_cfg = {}
self.stage2_cfg['NUM_MODULES'] = 1
self.stage2_cfg['NUM_BRANCHES'] = 2
self.stage2_cfg['BLOCK'] = 'BASIC'
self.stage2_cfg['NUM_BLOCKS'] = [4, 4]
self.stage2_cfg['NUM_CHANNELS'] = [40, 80]
self.stage2_cfg['FUSE_METHOD'] = 'SUM'
num_channels = self.stage2_cfg['NUM_CHANNELS']
block = blocks_dict[self.stage2_cfg['BLOCK']]
num_channels = [
num_channels[i] * block.expansion
for i in range(len(num_channels))
]
self.transition1 = self._make_transition_layer([stage1_out_channel],
num_channels)
self.stage2, pre_stage_channels = self._make_stage(
self.stage2_cfg, num_channels)
# -- stage 3
self.stage3_cfg = {}
self.stage3_cfg['NUM_MODULES'] = 4
self.stage3_cfg['NUM_BRANCHES'] = 3
self.stage3_cfg['BLOCK'] = 'BASIC'
self.stage3_cfg['NUM_BLOCKS'] = [4, 4, 4]
self.stage3_cfg['NUM_CHANNELS'] = [40, 80, 160]
self.stage3_cfg['FUSE_METHOD'] = 'SUM'
num_channels = self.stage3_cfg['NUM_CHANNELS']
block = blocks_dict[self.stage3_cfg['BLOCK']]
num_channels = [
num_channels[i] * block.expansion
for i in range(len(num_channels))
]
self.transition2 = self._make_transition_layer(pre_stage_channels,
num_channels)
self.stage3, pre_stage_channels = self._make_stage(
self.stage3_cfg, num_channels)
last_inp_channels = np.int(np.sum(pre_stage_channels)) + 256
self.redc_layer = nn.Sequential(
nn.Conv2d(
in_channels=last_inp_channels,
out_channels=128,
kernel_size=3,
stride=1,
padding=1),
nn.BatchNorm2d(128, momentum=BN_MOMENTUM),
nn.ReLU(True),
)
self.aspp = nn.ModuleList(aspp(in_channel=128))
# additional layers specfic for Phase 3
self.pred_conv = nn.Conv2d(128, 512, 3, padding=1)
self.pred_bn = nn.BatchNorm2d(512)
self.GAP = nn.AdaptiveAvgPool2d(1)
# Specially for hidden domain
# Set the domain for learnable parameters
domain_center_src = np.load(self.domain_center_model)
G_SHA = torch.from_numpy(domain_center_src['G_SHA']).view(1, -1, 1, 1)
G_SHB = torch.from_numpy(domain_center_src['G_SHB']).view(1, -1, 1, 1)
G_QNRF = torch.from_numpy(domain_center_src['G_QNRF']).view(
1, -1, 1, 1)
self.n_domain = 3
self.G_all = torch.cat(
[G_SHA.clone(), G_SHB.clone(),
G_QNRF.clone()], dim=0)
self.G_all = nn.Parameter(self.G_all)
self.last_layer = nn.Sequential(
nn.Conv2d(
in_channels=128,
out_channels=64,
kernel_size=3,
stride=1,
padding=1),
nn.BatchNorm2d(64, momentum=BN_MOMENTUM),
nn.ReLU(True),
nn.Conv2d(
in_channels=64,
out_channels=32,
kernel_size=3,
stride=1,
padding=1),
nn.BatchNorm2d(32, momentum=BN_MOMENTUM),
nn.ReLU(True),
nn.Conv2d(
in_channels=32,
out_channels=1,
kernel_size=1,
stride=1,
padding=0),
)
def _make_transition_layer(self, num_channels_pre_layer,
num_channels_cur_layer):
num_branches_cur = len(num_channels_cur_layer)
num_branches_pre = len(num_channels_pre_layer)
transition_layers = []
for i in range(num_branches_cur):
if i < num_branches_pre:
if num_channels_cur_layer[i] != num_channels_pre_layer[i]:
transition_layers.append(
nn.Sequential(
nn.Conv2d(
num_channels_pre_layer[i],
num_channels_cur_layer[i],
3,
1,
1,
bias=False),
nn.BatchNorm2d(
num_channels_cur_layer[i],
momentum=BN_MOMENTUM), nn.ReLU(inplace=True)))
else:
transition_layers.append(None)
else:
conv3x3s = []
for j in range(i + 1 - num_branches_pre):
inchannels = num_channels_pre_layer[-1]
outchannels = num_channels_cur_layer[i] \
if j == i - num_branches_pre else inchannels
conv3x3s.append(
nn.Sequential(
nn.Conv2d(
inchannels, outchannels, 3, 2, 1, bias=False),
nn.BatchNorm2d(outchannels, momentum=BN_MOMENTUM),
nn.ReLU(inplace=True)))
transition_layers.append(nn.Sequential(*conv3x3s))
return nn.ModuleList(transition_layers)
def _make_layer(self, block, inplanes, planes, blocks, stride=1):
downsample = None
if stride != 1 or inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(
inplanes,
planes * block.expansion,
kernel_size=1,
stride=stride,
bias=False),
nn.BatchNorm2d(planes * block.expansion, momentum=BN_MOMENTUM),
)
layers = []
layers.append(block(inplanes, planes, stride, downsample))
inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(inplanes, planes))
return nn.Sequential(*layers)
def _make_stage(self,
layer_config,
num_inchannels,
multi_scale_output=True):
num_modules = layer_config['NUM_MODULES']
num_branches = layer_config['NUM_BRANCHES']
num_blocks = layer_config['NUM_BLOCKS']
num_channels = layer_config['NUM_CHANNELS']
block = blocks_dict[layer_config['BLOCK']]
fuse_method = layer_config['FUSE_METHOD']
modules = []
for i in range(num_modules):
# multi_scale_output is only used last module
if not multi_scale_output and i == num_modules - 1:
reset_multi_scale_output = False
else:
reset_multi_scale_output = True
modules.append(
HighResolutionModule(num_branches, block, num_blocks,
num_inchannels, num_channels, fuse_method,
reset_multi_scale_output))
num_inchannels = modules[-1].get_num_inchannels()
return nn.Sequential(*modules), num_inchannels
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.conv2(x)
x = self.bn2(x)
x = self.relu(x)
x = self.layer1(x)
x_head_1 = x
x_list = []
for i in range(self.stage2_cfg['NUM_BRANCHES']):
if self.transition1[i] is not None:
x_list.append(self.transition1[i](x))
else:
x_list.append(x)
y_list = self.stage2(x_list)
x_list = []
for i in range(self.stage3_cfg['NUM_BRANCHES']):
if self.transition2[i] is not None:
x_list.append(self.transition2[i](y_list[-1]))
else:
x_list.append(y_list[i])
x = self.stage3(x_list)
# Replace the classification heaeder with custom setting
# Upsampling
x0_h, x0_w = x[0].size(2), x[0].size(3)
x1 = F.interpolate(
x[1], size=(x0_h, x0_w), mode='bilinear', align_corners=False)
x2 = F.interpolate(
x[2], size=(x0_h, x0_w), mode='bilinear', align_corners=False)
x = torch.cat([x[0], x1, x2, x_head_1], 1)
# first, reduce the channel down
x = self.redc_layer(x)
pred_attn = self.GAP(F.relu_(self.pred_bn(self.pred_conv(x))))
pred_attn = F.softmax(pred_attn, dim=1)
pred_attn_list = torch.chunk(pred_attn, 4, dim=1)
aspp_out = []
for k, v in enumerate(self.aspp):
if k % 2 == 0:
aspp_out.append(self.aspp[k + 1](v(x)))
else:
continue
# Using Aspp add, and relu inside
for i in range(4):
x = x + F.relu_(aspp_out[i] * 0.25) * pred_attn_list[i]
bz = x.size(0)
# -- Besides, we also need to let the prediction attention be close to visable domain
# -- Calculate the domain distance and get the weights
# - First, detach domains
G_all_d = self.G_all.detach() # use detached G_all for calulcating
pred_attn_d = pred_attn.detach().view(bz, 512, 1, 1)
if self.cosine == 1:
G_A, G_B, G_Q = torch.chunk(G_all_d, self.n_domain, dim=0)
cos_dis_A = F.cosine_similarity(pred_attn_d, G_A, dim=1).view(-1)
cos_dis_B = F.cosine_similarity(pred_attn_d, G_B, dim=1).view(-1)
cos_dis_Q = F.cosine_similarity(pred_attn_d, G_Q, dim=1).view(-1)
cos_dis_all = torch.stack([cos_dis_A, cos_dis_B,
cos_dis_Q]).view(bz, -1) # bz*3
cos_dis_all = F.softmax(cos_dis_all, dim=1)
target_attn = cos_dis_all.view(bz, self.n_domain, 1, 1, 1).expand(
bz, self.n_domain, 512, 1, 1) * self.G_all.view(
1, self.n_domain, 512, 1, 1).expand(
bz, self.n_domain, 512, 1, 1)
target_attn = torch.sum(
target_attn, dim=1, keepdim=False) # bz * 512 * 1 * 1
if self.fix_domain:
target_attn = target_attn.detach()
else:
raise ValueError('Have not implemented not cosine distance yet')
x = self.last_layer(x)
x = F.relu_(x)
x = F.interpolate(
x, size=(x0_h * 2, x0_w * 2), mode='bilinear', align_corners=False)
return x, pred_attn, target_attn
def init_weights(
self,
pretrained='',
):
logger.info('=> init weights from normal distribution')
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.normal_(m.weight, std=0.01)
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
if os.path.isfile(pretrained):
pretrained_dict = torch.load(pretrained)
logger.info(f'=> loading pretrained model {pretrained}')
model_dict = self.state_dict()
pretrained_dict = {
k: v
for k, v in pretrained_dict.items() if k in model_dict.keys()
}
for k, _ in pretrained_dict.items():
logger.info(f'=> loading {k} pretrained model {pretrained}')
model_dict.update(pretrained_dict)
self.load_state_dict(model_dict)
else:
assert 1 == 2
3.3 图片检测人群数量
接下来,我们加载已经训练好的模型进行预测,这里省略了中间复杂的过程,大家可以一键调用预测。
from modelscope.pipelines import pipeline
from modelscope.utils.constant import Tasks
from modelscope.outputs import OutputKeys
from modelscope.utils.cv.image_utils import numpy_to_cv2img
import cv2
crowd_model = pipeline(Tasks.crowd_counting,model='damo/cv_hrnet_crowd-counting_dcanet')
imgs = '111.png'
results = crowd_model(imgs)
print('人数为:', int(results[OutputKeys.SCORES]))
vis_img = results[OutputKeys.OUTPUT_IMG]
vis_img = numpy_to_cv2img(vis_img)
cv2.imwrite('result1.jpg', vis_img)
预测生成图:
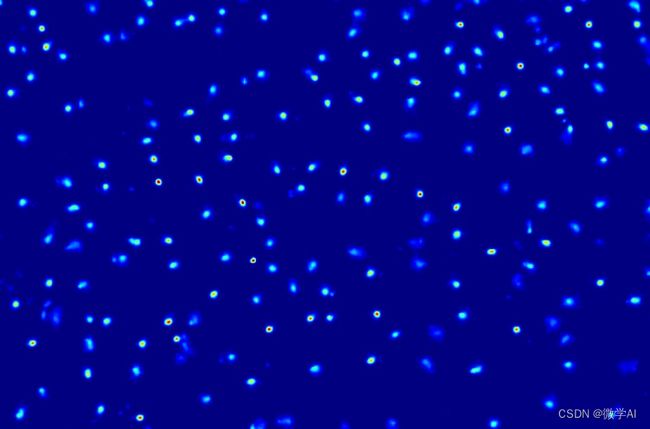
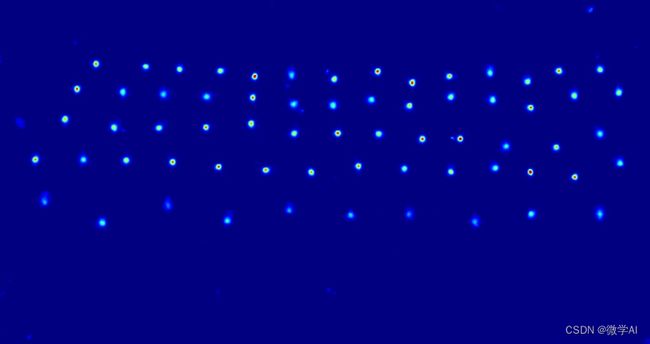
毕业合照人群计数:
预测生成图:
3.4 视频检测人群数量
对于视频,我们可以将其分解为一系列的图像帧,然后使用我们的模型来检测每一帧中的人群数量。
import cv2
from modelscope.outputs import OutputKeys
def predict_video(video_path):
cap = cv2.VideoCapture(video_path)
while (cap.isOpened()):
ret, frame = cap.read()
if ret:
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
preds = crowd_model(gray)
print(preds[OutputKeys.SCORES])
else:
break
cap.release()
video_path = 'test.mp4'
predict_video(video_path)
4. 结论
在这个项目中,我们成功地使用深度学习模型来计算图像和视频中的人群数量。这个模型可以被广泛地应用于人流监测和管理、安全防控、市场调研和决策支持、城市规划和交通管理等领域。