- squarified算法
淬渊阁
算法算法c++qt数据结构前端
其他参考资料:https://www.docin.com/p-1509919023.htmlSquarifiedTreemaps论文算法复现_squarified算法-CSDN博客手绘草图,发觉之前网上很多的图都会误导大家去理解算法前处理1首先对输入数据进行排序2对数据数据总和和窗口面积进行等比换手。算法基本思路:原始数据:{6,6,4,3,2,2,1}step1:首先确认最短边,将第一个元素6放
- FCN——第二课
湘溶溶
分割深度学习深度学习人工智能学习python
语义分割中的全卷积网络语义分割中的全卷积网络一、引言和相关工作二、全卷积网络三、论文算法模型详解四、论文算法模型细节五、实验设置和结果分析六、讨论和总结一、引言和相关工作在以往的分割方法中,主要有两大类缺点:1.基于图像块的分割虽然常见,但是效率低,且往往需要前期或者后期处理(例如超像素、检测框局部预分类等)2.语义分割面临着语义和位置信息不可兼得的问题。全局信息解决的“是什么”,而局部信息解决的
- 图像抠图Image Matting算法调研
AI吃大瓜
Matting深度学习ImageMatting图像抠图Portrait
目录1.Trimap和Strokes2.相关数据集3.论文算法调研3.1DeepImageMatting3.2SemanticImageMatting3.3BackgroundMatting3.4BackgroundMattingV23.5SemanticHumanMatting3.6HAttMatting3.7MMNet:TowardsReal-TimeAutomaticPortraitMatt
- TD-LSTM & AT-LSTM
尧景
深度之眼情感分析自然语言处理
目录论文阅读准备前期知识储备学习目标论文导读论文研究背景、成果及意义论文泛读论文结构摘要---AT-LSTM摘要---TD-LSTM论文精读论文算法模型总览LSTM论文算法模型细节论文一TD-LSTMTC-LSTM论文二AT-LSTMATAE-LSTM实验设置及结果分析实验数据实验结果及分析论文一论文二论文总结论文一论文二论文阅读准备前期知识储备学习目标论文导读论文研究背景、成果及意义粗粒度的情感
- Matlab 高斯_拉普拉斯滤波器处理医学图像
巷中人
matlab
前言:本程序是我去年实现论文算法时所做。主要功能为标记切割肝脏区域。时间有点久,很多细节已经模糊加上代码做了很多注释,因此在博客中不再详述。NOTE:程序分几大段功能模块,仔细阅读,对解决医学图像还是有一定的借鉴意义想借鉴本文的一定要仔细阅读代码和注释,中间有人机交互部分,空跑会抛异常.dcm数据,我放到了我的百度云盘,有兴趣的可以下载,实测一下代码。dcm数据连接clc,clearimg_1=d
- Fast Image Processing with Fully-Convolutional Networks
zju不死谷神
摘要:提出一种方法用来加速很多种的图像处理操作。使用全卷积网络来做这些操作。在10中图像处理操作上评估提出的方法。本文章的目的就是用一个结构的神经网络来完成各种各样的图像处理算法处理出来的效果。论文算法提出的三个要求:准确率,速度和紧凑性因为要使用在不同尺寸的图上,所以考虑全卷积,实验发现为高分辨率设计的网络用在低分辨率上就会有更好的效果,考虑原因是因为感受野更大。Contextaggregati
- 《横向联邦学习中 PCA差分隐私数据发布算法》论文算法原理笔记
superY25
人工智能差分隐私横向联邦PCA联邦学习
论文地址:https://www.arocmag.com/article/01-2022-01-041.html论文摘要为了让不同组织在保护本地敏感数据和降维后发布数据隐私的前提下,联合使用PCA进行降维和数据发布,提出横向联邦PCA差分隐私数据发布算法。引入随机种子联合协商方案,在各站点之间以较少通信代价生成相同随机噪声矩阵。提出本地噪声均分方案,将均分噪声加在本地协方差矩阵上。一方面,保护本地
- 深度学习(7)之图像抠图 Image Matting算法调研
明月醉窗台
#深度学习深度学习算法人工智能
目录1.Trimap和Strokes2.相关数据集3.论文算法调研3.1DeepImageMatting3.2SemanticImageMatting3.3BackgroundMatting3.4BackgroundMattingV23.5SemanticHumanMatting3.6HAttMatting3.7MMNet:TowardsReal-TimeAutomaticPortraitMatt
- 首个开源室外点云分割工具箱,提供多篇论文算法的强基线复现模型!(已开源)
OpenDataLab
开源框架自动驾驶点云全景分割开源框架
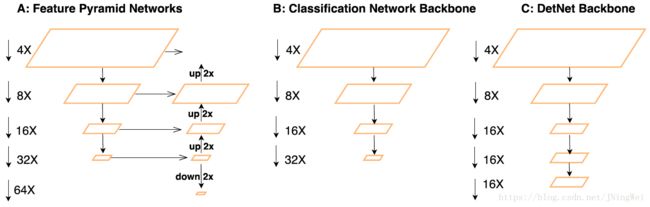
PCSeg高性能点云分割开源框架强力来袭!支持多个公开数据集上多种SOTA算法高精度复现,训练时间更短、分割精度更高,开箱即用。室外点云全景分割研究必备,目前已开源,欢迎star一、PCSeg高性能点云分割开源框架点云语义分割任务旨在将点云中的每个点分配类别甚至实例标签。然而,作为自动驾驶3D感知的关键任务之一,现有开源工具箱大多仅围绕室内场景进行,缺乏对室外场景的支持。于是,上海人工智能实验室智
- 2020-5-3晨间日记
柏芙
今天是什么日子起床:8:15就寝:未知数天气:晴(今天天气太好了)心情:一般纪念日:普通的日子任务清单昨日完成的任务,最重要的三件事:昨天给老师审稿的文章完成✔改进:今天要认真写自己的论文习惯养成:早起早睡身体好,加油!周目标·完成进度跑了几天步✔论文审稿✔论文算法✘学习·信息·阅读论文结构✘,还有一些混乱更文✘读书✘健康·饮食·锻炼健康✔锻炼✔饮食✘人际·家人·朋友perfect✔工作·思考te
- Unbiased Scene Graph Generation from Biased Training论文复现
小火车、摆动的旋律
FasterRcnnpython深度学习pytorch
写在前面 最近在学习场景图生成SGG,看了2020CVPRoral《UnbiasedSceneGraphGenerationfromBiasedTraining》,打算复现这篇论文。论文基于mask-rcnn论文算法,相比yolo,在配置环境的时候,多了编译环境这一步,因为涉及C++,所以可能会出现一些难题,在复现的过程中,也学习了很多有用的知识,所以准备记录一下。github链接点这里环境
- GraphSage:Inductive Representation Learning on Large Graphs
尧景
深度之眼图神经网络自然语言处理神经网络
目录简介前期知识储备论文结构学习目标论文研究背景、成果及意义研究背景模型框架研究意义论文泛读摘要论文小标题论文精读论文算法模型总览GNN结构GraphSAGE结构论文算法模型的细节细节一:模型框架细节二:无监督/有监督细节三:多种aggregator函数细节四:batch训练算法细节五:理论分析实验设置和结果分析实验设计归纳式节点点分类实验运行效率和参数分析不同aggregator函数分析论文总结
- 【论文理解】Uncertainty-Aware Few-Shot Image Classification
辣椒油li
少样本学习计算机视觉人工智能
内容概览前言一、文章目的1.背景2.目的二、核心思想三、论文算法1.基础框架2.获得分布3.计算方差(1).确定方法(2).图卷积求解建图图卷积4.基于不确定度的优化四、实验结果总结前言这篇论文是10月9号挂在arxiv上的,作者来自中科大。论文在少样本图像分类算法方面提出了一个独特的改进角度,个人认为比较有意思。我在读完之后,想要把论文的思想以及自己的理解记录下来,供大家参考。如有错误请大家指出
- Cascade R-CNN 笔记
农民工小陈
前言1.本文重点是CascadeR-CNN的级联方式以及为何有效,尽量用较少篇幅表达清楚论文算法,其他一些不影响理解算法的东西不做赘述2.博客主要是学习记录,为了更好理解和方便以后查看,当然如果能为别人提供帮助就更好了,如果有不对的地方请指正(论文中的链接是我经过大量搜索,个人认为讲解最清楚的参考)论文链接代码链接论文翻译创新点用不同阈值的正负样本训练检测器并级联,提出CascadeR-CNN问题
- 何恺明 matlab,[论文复现]何恺明博士CVPR2009去雾算法(1)
晴天学姐
何恺明matlab
一、前言近期打算研读一下何博士第一篇文章,复现其论文算法,主要参考的博文有:[1]KaimingHe论文心得https://www.cnblogs.com/molakejin/p/5708883.html[2]论文原理、实现与效果http://www.cnblogs.com/Imageshop/p/3281703.html[3]论文原文及相关资料下载http://kaiminghe.com/[4]
- 【目标检测·yolo系列】YOLOV3目标检测论文笔记(参考 同济子豪兄的解读)
chentao326
深度学习深度学习神经网络yolov3
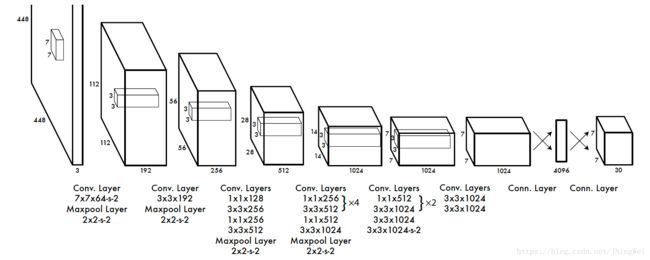
目录骨干网络Darknet53后面的论文算法架构都是在yolov3基础上更新来的骨干网络Darknet53由于主要网络中是全卷积层,所以是可以输入任意大小的图片(得是×32)
- SIFT特征点提取及描述论文算法详解
图南i
ComputerVision计算机视觉
SIFT特征点提取及描述论文算法详解1.尺度空间极值检测(Scale-spaceextremadetection)1.1尺度空间和极值1.2DoG和LoG的关系1.3构建高斯尺度差分空间Tips2.极值点定位(Keypointlocalization)2.1空间局部极值检测2.2空间点精确定位2.3去除不稳定的特征点3.特征点描述子构造(OrientationassignmentandKeypoi
- Generative Cooperative Learning for Unsupervised Video Anomaly Detection
wfl6666
深度学习计算机视觉人工智能
文章目录1摘要2论文算法概述(GCL)3实现细节3.1训练数据组成3.2GeneratorNetwork3.3DiscriminatorNetwork3.4NegativeLearningofGeneratorNetwork3.5Self-SupervisedPre-training4总结一种真正意义上的无监督视频异常检测方法1摘要视频异常检测在弱监督和one-class-classifier(O
- 灰度共生矩阵的MatLab实现
光电学子
信号与图像处理
上周五在复现一篇论文("Visual-Salience-BasedToneMappingforHighDynamicRangeImages")中的算法时涉足到了基于灰度共生矩阵的显著性度量,便顺手给实现了以下。我们将共生关系定义在w*w的窗口内,窗口内的不同两个像素p、q为共生关系,其灰度、即为共生灰度。论文算法在计算灰度共生矩阵前会先将灰度值量化为K个等级。当共生关系的考察窗口半径为r时,对于每
- Graph Attention Networks
尧景
深度之眼图神经网络神经网络自然语言处理
目录前期简介论文导读论文研究背景、成果及意义研究背景研究成果研究意义论文泛读摘要论文小标题论文精读论文算法模型总览模型的细节消息传递机制(MessagePassing)Attention机制Multi-headAttention直推式学习&归纳式学习GAT算法实验设置和结果分析论文总结前期简介前期知识储备论文结构学习目标论文导读论文研究背景、成果及意义研究背景图像上的卷积操作InCNN,pixel
- 随机分布式延迟PSO(RODDPSO)+K-Means算法(Python代码实现)
研学社
#多目标智能算法与应用#神经网络预测预测与分类#kmeans算法机器学习
欢迎来到本博客❤️❤️❤️博主优势:博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。⛳️座右铭:行百里者,半于九十。目录1概述2运行结果3参考文献4Python代码实现1概述本文复现论文算法RODDPSO+K-Means,用优化的粒子群算法对K-Means算法求初始的簇心,以达到优化聚类算法的目的。分布式时滞表现出独特的空间性质,可模拟在特定时间段内通过一定数量的并行通道/路径分布的信号传播延迟
- 激光雷达和相机联合标定之cam_lidar_calibration
雨霖 X
计算机视觉自动驾驶
关于cam_lidar_calibration(2021)安装使用一.简介在众多的lidar和camera标定的开源程序中,效果相对不错的就是cam_lidar_calibration了,其余开源要么标定过程复杂、要么误差太大,该开源包经过一些改版。下列是cam_lidar_calibration系列的开源算法时间对应的论文算法解析开源算法地址2019(最原始版本)Automaticextrins
- 从视频中获取发丝都能看见的人体步态轮廓图
舞雩.
步态识别java开发语言
从视频中获取发丝都能看见的人体步态轮廓图编辑写在前面实现代码:前言代码后话:写在前面最近在研究步态识别,复现了相关的论文算法:比较火的GaitSet等,也从网上下载了中科大开源的数据集CASIA-B进行训练,一切看起来都是那么的美好!但是,当我自己制作了视频数据集之后,却不知道怎么转换为CASIA-B中一样的二值人体轮廓图,网上告知的是用实例分割办法,我尝试使用Mask-RCNN搭建了实例分割平台
- 深度之眼Paper带读笔记GNN.07.GraphSAGE
oldmao_2000
#图神经网络GNN(完结)深度学习人工智能自然语言处理GraphSAGE
文章目录前言论文结构学习目标导读研究背景notation图卷积GCN/GAT/GraphSAGE通用流程研究意义泛读摘要核心论文结构论文精读论文算法模型总览GNN结构回顾GraphSAGE结构模型细节一:算法说明模型细节二:直推式+归纳式学习模型细节三:聚合方式模型细节四:Batch训练模型细节五:理论分析实验设置及结果分析数据集介绍:节点分类任务运行效率以及参数分析论文总结关键点创新点启发点代码
- HDR技术讲解之Photographic Tone Reproduction for Digital Images论文算法复现及改进
光电学子
信号与图像处理
2020/10/14说明:因该博客前后做了几次修改影响了可读性,故而对其进行了重新整理。原博客中还有一个问题,就是论文中初始亮度映射公式写错了,但我没有注意到这一点,并且还把这个公式看错了以致给出了错误的实现程序。当然啦,原博客中给出的改进版程序是没问题的。下面重新贴出程序代码及数据集、测试结果的网盘链接供大家测试。链接:https://pan.baidu.com/s/1z4RTwJWPexoss
- 生成对抗网络(GAN)详细介绍及数字手写体生成应用仿真(附代码)
康x呀
生成对抗网络神经网络python算法tensorflow深度学习
生成对抗网络(GAN)详细介绍及生成数字手写体仿真(附代码)生成对抗网络简介深度学习基础介绍损失函数与梯度下降反向传播算法推导批量标准化介绍Dropout介绍GAN原始论文理解生成对抗网络基本介绍生成对抗网络理论推导数据生成生成器——制造数据计算差异判别器——学习数据差异性最大化差异推导优化过程GAN原始论文算法步骤详述判别器训练算法生成器训练算法GAN存在的问题可解释性非常差训练不稳定优化震荡现
- 华为云AI论文精读会2021第一期:高效语义分割模型Fast-SCNN分享
华为云
官方活动华为云论文高校大赛
2020年举办的华为云AI经典论文复现活动,不仅受到了参赛者们一致好评,也产出了许多优质的算法成果。这些论文复现的算法描述、源代码以及算法使用指导文档均已发布到了AIGallery。为了让开发者更好的使用这些论文算法,华为云AI在此举办华为云AI论文精读会2021活动。华为云AI论文精读会2021邀请计算机视觉、迁移学习、自然语言处理等领域专家学者基于华为云ModelArts解读经典论文算法,让更
- 数据分析/算法/建模/产品实习面经(字节跳动、爱奇艺、平安科技、石墨文档、欧克云链、水滴、茄子快传……)
严肃温柔
work数据分析python区块链面试
平安科技-数据分析/算法实习生医疗欺诈方向1.自我介绍2.讲一个建模项目3.算法,PCA/LGBM/KNN4.论文解读(面试前一天给了两篇英文论文,选一个讲解论文思路)5.论文算法实现水滴-数据分析实习生一面-HR面1.为什么要来实习2.职业规划二面-技术1.讲一个项目,项目深挖2.sql,计算月销量第10的产品,用窗口函数爱奇艺-数据分析实习生
- 深度之眼Paper带读笔记GNN.01.Node2Vec
oldmao_2001
#图神经网络GNN
文章目录前言论文结构学习目标论文研究背景、成果、意义研究背景研究成果研究意义泛读摘要核心观点论文标题传统的图的特征工程图的构建图的应用精读论文算法模型总览论文算法模型的细节细节一细节二BFS和DFS细节三有偏RandomWalk算法细节四算法细节五aliassampling实验设置和结果分析CaseStudy:LesMisérablesnetworkExperimentalsetupMulti-l
- 基于去雾算法的低光照图像增强算法(论文算法Python复现)
华南农业大学-郭庆文
图像处理
文章目录致谢论文原理工程实现视频应用Acknowledge致谢这学期有幸参加学习学校韩宇星教授的数字图像工程(全英)课程,课程最后给了1篇paper①,是基于去雾算法的低光照图像增强算法,本人觉着非常厉害,非常感谢老师提供这篇论文,有兴趣的大伙可以一起学习一下。①DongX,WangG,PangY,etal.Fastefficientalgorithmforenhancementoflowligh
- VMware Workstation 11 或者 VMware Player 7安装MAC OS X 10.10 Yosemite
iwindyforest
vmwaremac os10.10workstationplayer
最近尝试了下VMware下安装MacOS 系统,
安装过程中发现网上可供参考的文章都是VMware Workstation 10以下, MacOS X 10.9以下的文章,
只能提供大概的思路, 但是实际安装起来由于版本问题, 走了不少弯路, 所以我尝试写以下总结, 希望能给有兴趣安装OSX的人提供一点帮助。
写在前面的话:
其实安装好后发现, 由于我的th
- 关于《基于模型驱动的B/S在线开发平台》源代码开源的疑虑?
deathwknight
JavaScriptjava框架
本人从学习Java开发到现在已有10年整,从一个要自学 java买成javascript的小菜鸟,成长为只会java和javascript语言的老菜鸟(个人邮箱:
[email protected])
一路走来,跌跌撞撞。用自己的三年多业余时间,瞎搞一个小东西(基于模型驱动的B/S在线开发平台,非MVC框架、非代码生成)。希望与大家一起分享,同时有许些疑虑,希望有人可以交流下
平台
- 如何把maven项目转成web项目
Kai_Ge
mavenMyEclipse
创建Web工程,使用eclipse ee创建maven web工程 1.右键项目,选择Project Facets,点击Convert to faceted from 2.更改Dynamic Web Module的Version为2.5.(3.0为Java7的,Tomcat6不支持). 如果提示错误,可能需要在Java Compiler设置Compiler compl
- 主管???
Array_06
工作
转载:http://www.blogjava.net/fastzch/archive/2010/11/25/339054.html
很久以前跟同事参加的培训,同事整理得很详细,必须得转!
前段时间,公司有组织中高阶主管及其培养干部进行了为期三天的管理训练培训。三天的课程下来,虽然内容较多,因对老师三天来的课程内容深有感触,故借着整理学习心得的机会,将三天来的培训课程做了一个
- python内置函数大全
2002wmj
python
最近一直在看python的document,打算在基础方面重点看一下python的keyword、Build-in Function、Build-in Constants、Build-in Types、Build-in Exception这四个方面,其实在看的时候发现整个《The Python Standard Library》章节都是很不错的,其中描述了很多不错的主题。先把Build-in Fu
- JSP页面通过JQUERY合并行
357029540
JavaScriptjquery
在写程序的过程中我们难免会遇到在页面上合并单元行的情况,如图所示
如果对于会的同学可能很简单,但是对没有思路的同学来说还是比较麻烦的,提供一下用JQUERY实现的参考代码
function mergeCell(){
var trs = $("#table tr");
&nb
- Java基础
冰天百华
java基础
学习函数式编程
package base;
import java.text.DecimalFormat;
public class Main {
public static void main(String[] args) {
// Integer a = 4;
// Double aa = (double)a / 100000;
// Decimal
- unix时间戳相互转换
adminjun
转换unix时间戳
如何在不同编程语言中获取现在的Unix时间戳(Unix timestamp)? Java time JavaScript Math.round(new Date().getTime()/1000)
getTime()返回数值的单位是毫秒 Microsoft .NET / C# epoch = (DateTime.Now.ToUniversalTime().Ticks - 62135
- 作为一个合格程序员该做的事
aijuans
程序员
作为一个合格程序员每天该做的事 1、总结自己一天任务的完成情况 最好的方式是写工作日志,把自己今天完成了什么事情,遇见了什么问题都记录下来,日后翻看好处多多
2、考虑自己明天应该做的主要工作 把明天要做的事情列出来,并按照优先级排列,第二天应该把自己效率最高的时间分配给最重要的工作
3、考虑自己一天工作中失误的地方,并想出避免下一次再犯的方法 出错不要紧,最重
- 由html5视频播放引发的总结
ayaoxinchao
html5视频video
前言
项目中存在视频播放的功能,前期设计是以flash播放器播放视频的。但是现在由于需要兼容苹果的设备,必须采用html5的方式来播放视频。我就出于兴趣对html5播放视频做了简单的了解,不了解不知道,水真是很深。本文所记录的知识一些浅尝辄止的知识,说起来很惭愧。
视频结构
本该直接介绍html5的<video>的,但鉴于本人对视频
- 解决httpclient访问自签名https报javax.net.ssl.SSLHandshakeException: sun.security.validat
bewithme
httpclient
如果你构建了一个https协议的站点,而此站点的安全证书并不是合法的第三方证书颁发机构所签发,那么你用httpclient去访问此站点会报如下错误
javax.net.ssl.SSLHandshakeException: sun.security.validator.ValidatorException: PKIX path bu
- Jedis连接池的入门级使用
bijian1013
redisredis数据库jedis
Jedis连接池操作步骤如下:
a.获取Jedis实例需要从JedisPool中获取;
b.用完Jedis实例需要返还给JedisPool;
c.如果Jedis在使用过程中出错,则也需要还给JedisPool;
packag
- 变与不变
bingyingao
不变变亲情永恒
变与不变
周末骑车转到了五年前租住的小区,曾经最爱吃的西北面馆、江西水饺、手工拉面早已不在,
各种店铺都换了好几茬,这些是变的。
三年前还很流行的一款手机在今天看起来已经落后的不像样子。
三年前还运行的好好的一家公司,今天也已经不复存在。
一座座高楼拔地而起,
- 【Scala十】Scala核心四:集合框架之List
bit1129
scala
Spark的RDD作为一个分布式不可变的数据集合,它提供的转换操作,很多是借鉴于Scala的集合框架提供的一些函数,因此,有必要对Scala的集合进行详细的了解
1. 泛型集合都是协变的,对于List而言,如果B是A的子类,那么List[B]也是List[A]的子类,即可以把List[B]的实例赋值给List[A]变量
2. 给变量赋值(注意val关键字,a,b
- Nested Functions in C
bookjovi
cclosure
Nested Functions 又称closure,属于functional language中的概念,一直以为C中是不支持closure的,现在看来我错了,不过C标准中是不支持的,而GCC支持。
既然GCC支持了closure,那么 lexical scoping自然也支持了,同时在C中label也是可以在nested functions中自由跳转的
- Java-Collections Framework学习与总结-WeakHashMap
BrokenDreams
Collections
总结这个类之前,首先看一下Java引用的相关知识。Java的引用分为四种:强引用、软引用、弱引用和虚引用。
强引用:就是常见的代码中的引用,如Object o = new Object();存在强引用的对象不会被垃圾收集
- 读《研磨设计模式》-代码笔记-解释器模式-Interpret
bylijinnan
java设计模式
声明: 本文只为方便我个人查阅和理解,详细的分析以及源代码请移步 原作者的博客http://chjavach.iteye.com/
package design.pattern;
/*
* 解释器(Interpreter)模式的意图是可以按照自己定义的组合规则集合来组合可执行对象
*
* 代码示例实现XML里面1.读取单个元素的值 2.读取单个属性的值
* 多
- After Effects操作&快捷键
cherishLC
After Effects
1、快捷键官方文档
中文版:https://helpx.adobe.com/cn/after-effects/using/keyboard-shortcuts-reference.html
英文版:https://helpx.adobe.com/after-effects/using/keyboard-shortcuts-reference.html
2、常用快捷键
- Maven 常用命令
crabdave
maven
Maven 常用命令
mvn archetype:generate
mvn install
mvn clean
mvn clean complie
mvn clean test
mvn clean install
mvn clean package
mvn test
mvn package
mvn site
mvn dependency:res
- shell bad substitution
daizj
shell脚本
#!/bin/sh
/data/script/common/run_cmd.exp 192.168.13.168 "impala-shell -islave4 -q 'insert OVERWRITE table imeis.${tableName} select ${selectFields}, ds, fnv_hash(concat(cast(ds as string), im
- Java SE 第二讲(原生数据类型 Primitive Data Type)
dcj3sjt126com
java
Java SE 第二讲:
1. Windows: notepad, editplus, ultraedit, gvim
Linux: vi, vim, gedit
2. Java 中的数据类型分为两大类:
1)原生数据类型 (Primitive Data Type)
2)引用类型(对象类型) (R
- CGridView中实现批量删除
dcj3sjt126com
PHPyii
1,CGridView中的columns添加
array(
'selectableRows' => 2,
'footer' => '<button type="button" onclick="GetCheckbox();" style=&
- Java中泛型的各种使用
dyy_gusi
java泛型
Java中的泛型的使用:1.普通的泛型使用
在使用类的时候后面的<>中的类型就是我们确定的类型。
public class MyClass1<T> {//此处定义的泛型是T
private T var;
public T getVar() {
return var;
}
public void setVa
- Web开发技术十年发展历程
gcq511120594
Web浏览器数据挖掘
回顾web开发技术这十年发展历程:
Ajax
03年的时候我上六年级,那时候网吧刚在小县城的角落萌生。传奇,大话西游第一代网游一时风靡。我抱着试一试的心态给了网吧老板两块钱想申请个号玩玩,然后接下来的一个小时我一直在,注,册,账,号。
彼时网吧用的512k的带宽,注册的时候,填了一堆信息,提交,页面跳转,嘣,”您填写的信息有误,请重填”。然后跳转回注册页面,以此循环。我现在时常想,如果当时a
- openSession()与getCurrentSession()区别:
hetongfei
javaDAOHibernate
来自 http://blog.csdn.net/dy511/article/details/6166134
1.getCurrentSession创建的session会和绑定到当前线程,而openSession不会。
2. getCurrentSession创建的线程会在事务回滚或事物提交后自动关闭,而openSession必须手动关闭。
这里getCurrentSession本地事务(本地
- 第一章 安装Nginx+Lua开发环境
jinnianshilongnian
nginxluaopenresty
首先我们选择使用OpenResty,其是由Nginx核心加很多第三方模块组成,其最大的亮点是默认集成了Lua开发环境,使得Nginx可以作为一个Web Server使用。借助于Nginx的事件驱动模型和非阻塞IO,可以实现高性能的Web应用程序。而且OpenResty提供了大量组件如Mysql、Redis、Memcached等等,使在Nginx上开发Web应用更方便更简单。目前在京东如实时价格、秒
- HSQLDB In-Process方式访问内存数据库
liyonghui160com
HSQLDB一大特色就是能够在内存中建立数据库,当然它也能将这些内存数据库保存到文件中以便实现真正的持久化。
先睹为快!
下面是一个In-Process方式访问内存数据库的代码示例:
下面代码需要引入hsqldb.jar包 (hsqldb-2.2.8)
import java.s
- Java线程的5个使用技巧
pda158
java数据结构
Java线程有哪些不太为人所知的技巧与用法? 萝卜白菜各有所爱。像我就喜欢Java。学无止境,这也是我喜欢它的一个原因。日常
工作中你所用到的工具,通常都有些你从来没有了解过的东西,比方说某个方法或者是一些有趣的用法。比如说线程。没错,就是线程。或者确切说是Thread这个类。当我们在构建高可扩展性系统的时候,通常会面临各种各样的并发编程的问题,不过我们现在所要讲的可能会略有不同。
- 开发资源大整合:编程语言篇——JavaScript(1)
shoothao
JavaScript
概述:本系列的资源整合来自于github中各个领域的大牛,来收藏你感兴趣的东西吧。
程序包管理器
管理javascript库并提供对这些库的快速使用与打包的服务。
Bower - 用于web的程序包管理。
component - 用于客户端的程序包管理,构建更好的web应用程序。
spm - 全新的静态的文件包管
- 避免使用终结函数
vahoa.ma
javajvmC++
终结函数(finalizer)通常是不可预测的,常常也是很危险的,一般情况下不是必要的。使用终结函数会导致不稳定的行为、更差的性能,以及带来移植性问题。不要把终结函数当做C++中的析构函数(destructors)的对应物。
我自己总结了一下这一条的综合性结论是这样的:
1)在涉及使用资源,使用完毕后要释放资源的情形下,首先要用一个显示的方