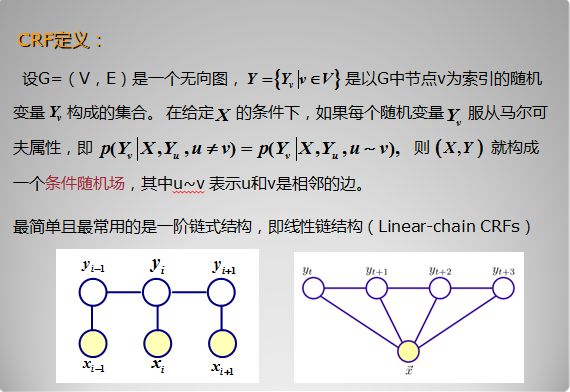
条件随机场(Conditional random fields)
条件随机场模型是Lafferty于2001年,在最大熵模型和隐马尔科夫模型的基础上,提出的一种判别式概率无向图学习模型,是一种用于标注和切分有序数据的条件概率模型。CRF最早是针对序列数据分析提出的,现已成功应用于自然语言处理(NLP)、生物信息学、机器视觉及网络智能等领域。
1. 随机场
2. 马尔科夫随机场(MRF)
1. Matlab版的UGM:http://www.di.ens.fr/~mschmidt/Software/UGM.html,作者法国的,写了很多实用的工具箱。
2. C++版的gco-v3.0:http://vision.csd.uwo.ca/code/,用于求解crf,作者Olga Veksler,专门研究Graph cut算法。
3. Oxford Brookes的ALE: http://cms.brookes.ac.uk/staff/PhilipTorr/ale.htm,作者Lubor Ladicky,写了5年写出来的一套程序,他在博士期间的所有工作几乎在这套代码里了,纯c++的,代码写得很规范,能学到不少c++编程的东西,没用opencv,需要耐心仔细地结合论文看才能看懂。
4. ANU的Stephen Gould开发的c++库Darwin:http://drwn.anu.edu.au/,能在windows下用,但更适合linux,工具箱里的一些应用也包括了他博士时做的工作,仔细研究这个库可以学到不少先进的东西。
另外,如果要研究高阶的CRF,可以参见这三个人的主页:
1. Pushmeet Kohli,这是个专家级的,2007年Oxford Brookes的Phd毕业,其间就研究这个,现在在MSRC:
http://research.microsoft.com/en-us/um/people/pkohli/
2. Lubor Ladicky,继续了Kohli的工作,2011年Oxford Brookes的Phd毕业,现在Oxford,主要用CRF做场景理解:
http://www.robots.ox.ac.uk/~lubor/
3. Stephen Gould,2010年Stanford的Phd毕业,现在ANU,也用高阶CRF做场景理解,还开发了一套工具箱(Darwin),比较适合在Linux下用。
http://users.cecs.anu.edu.au/~sgould/index.html