Learning ROS for Robotics Programming Second Edition学习笔记(二) indigo tools
Learning ROS for Robotics Programming Second Edition学习笔记(二) indigo tools
笔记一记录了一些常用的基本命令(cmd),笔记二介绍一些可视化的编译调试工具(tool)。
--roscore
--roslaunch chapter2_tutorials chapter2.launch
--rosnode list
/chap2_example1_a
/chap2_example1_b
/rosout
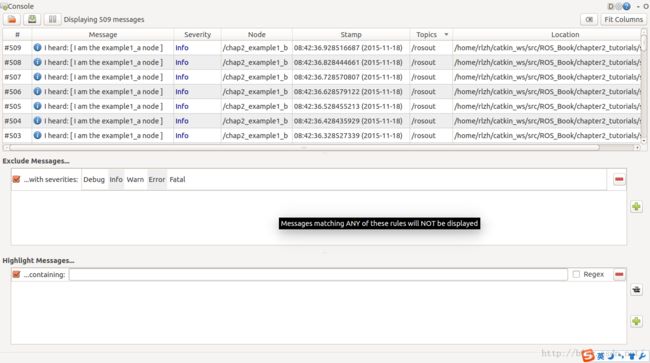
--rqt_console
--rosrun chapter2_tutorials chap2_example4
[ INFO] [1447807491.472441519]: Reconfigure Request: 1 0.100000 Chapter2_dynamic_reconfigure True 1
[ INFO] [1447807491.479674316]: Spinning node
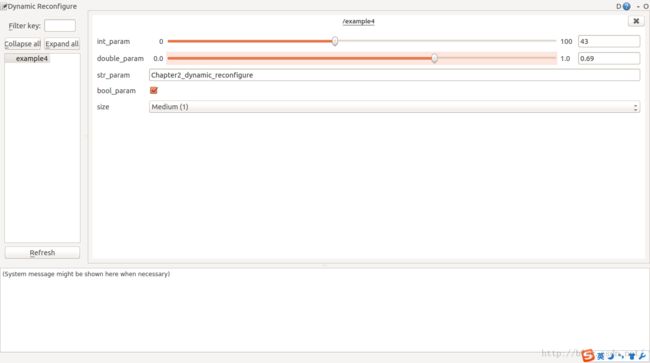
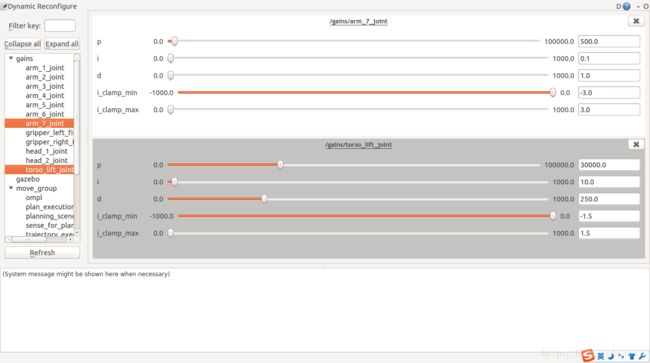
--rosrun rqt_reconfigure rqt_reconfigure
--rosrun rqt_logger_level rqt_logger_level
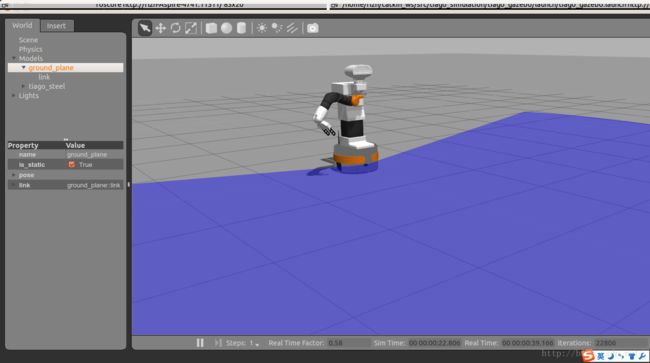
Gazebo demo!
TIAGo tiago_simulation
https://github.com/pal-robotics/tiago_simulation
http://wiki.ros.org/Robots/TIAGo
--roscore
--roslaunch tiago_gazebo tiago_gazebo.launch
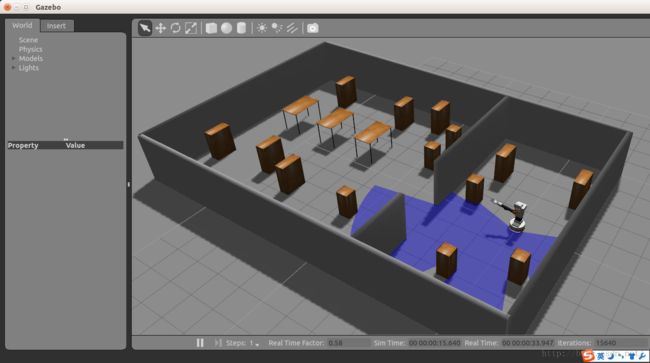
--roslaunch tiago_gazebo tiago_gazebo.launch world:=small_office
--rostopic list
/arm_controller/command
/arm_controller/follow_joint_trajectory/cancel
/arm_controller/follow_joint_trajectory/feedback
/arm_controller/follow_joint_trajectory/goal
/arm_controller/follow_joint_trajectory/result
/arm_controller/follow_joint_trajectory/status
/arm_controller/state
/attached_collision_object
/clock
/collision_object
/diagnostics
/gains/arm_1_joint/parameter_descriptions
/gains/arm_1_joint/parameter_updates
/gains/arm_2_joint/parameter_descriptions
/gains/arm_2_joint/parameter_updates
/gains/arm_3_joint/parameter_descriptions
/gains/arm_3_joint/parameter_updates
/gains/arm_4_joint/parameter_descriptions
/gains/arm_4_joint/parameter_updates
/gains/arm_5_joint/parameter_descriptions
/gains/arm_5_joint/parameter_updates
/gains/arm_6_joint/parameter_descriptions
/gains/arm_6_joint/parameter_updates
/gains/arm_7_joint/parameter_descriptions
/gains/arm_7_joint/parameter_updates
/gains/gripper_left_finger_joint/parameter_descriptions
/gains/gripper_left_finger_joint/parameter_updates
/gains/gripper_right_finger_joint/parameter_descriptions
/gains/gripper_right_finger_joint/parameter_updates
/gains/head_1_joint/parameter_descriptions
/gains/head_1_joint/parameter_updates
/gains/head_2_joint/parameter_descriptions
/gains/head_2_joint/parameter_updates
/gains/torso_lift_joint/parameter_descriptions
/gains/torso_lift_joint/parameter_updates
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/set_link_state
/gazebo/set_model_state
/gripper_controller/command
/gripper_controller/follow_joint_trajectory/cancel
/gripper_controller/follow_joint_trajectory/feedback
/gripper_controller/follow_joint_trajectory/goal
/gripper_controller/follow_joint_trajectory/result
/gripper_controller/follow_joint_trajectory/status
/gripper_controller/state
/ground_truth_odom
/head_controller/command
/head_controller/follow_joint_trajectory/cancel
/head_controller/follow_joint_trajectory/feedback
/head_controller/follow_joint_trajectory/goal
/head_controller/follow_joint_trajectory/result
/head_controller/follow_joint_trajectory/status
/head_controller/increment/cancel
/head_controller/increment/feedback
/head_controller/increment/goal
/head_controller/increment/result
/head_controller/increment/status
/head_controller/point_head_action/cancel
/head_controller/point_head_action/feedback
/head_controller/point_head_action/goal
/head_controller/point_head_action/result
/head_controller/point_head_action/status
/head_controller/state
/input_joy/cmd_vel
/ir/camera_info
/joint_states
/joy
/joy_priority
/joy_priority_action/cancel
/joy_priority_action/feedback
/joy_priority_action/goal
/joy_priority_action/result
/joy_priority_action/status
/joy_turbo_angular_decrease/cancel
/joy_turbo_angular_decrease/feedback
/joy_turbo_angular_decrease/goal
/joy_turbo_angular_decrease/result
/joy_turbo_angular_decrease/status
/joy_turbo_angular_increase/cancel
/joy_turbo_angular_increase/feedback
/joy_turbo_angular_increase/goal
/joy_turbo_angular_increase/result
/joy_turbo_angular_increase/status
/joy_turbo_decrease/cancel
/joy_turbo_decrease/feedback
/joy_turbo_decrease/goal
/joy_turbo_decrease/result
/joy_turbo_decrease/status
/joy_turbo_increase/cancel
/joy_turbo_increase/feedback
/joy_turbo_increase/goal
/joy_turbo_increase/result
/joy_turbo_increase/status
/joy_turbo_reset/cancel
/joy_turbo_reset/feedback
/joy_turbo_reset/goal
/joy_turbo_reset/result
/joy_turbo_reset/status
/joy_vel
/key_vel
/mobile_base_controller/cmd_vel
/mobile_base_controller/odom
/move_group/cancel
/move_group/display_contacts
/move_group/display_planned_path
/move_group/feedback
/move_group/goal
/move_group/monitored_planning_scene
/move_group/ompl/parameter_descriptions
/move_group/ompl/parameter_updates
/move_group/plan_execution/parameter_descriptions
/move_group/plan_execution/parameter_updates
/move_group/planning_scene_monitor/parameter_descriptions
/move_group/planning_scene_monitor/parameter_updates
/move_group/result
/move_group/sense_for_plan/parameter_descriptions
/move_group/sense_for_plan/parameter_updates
/move_group/status
/move_group/trajectory_execution/parameter_descriptions
/move_group/trajectory_execution/parameter_updates
/nav_vel
/pause_navigation
/pickup/cancel
/pickup/feedback
/pickup/goal
/pickup/result
/pickup/status
/place/cancel
/place/feedback
/place/goal
/place/result
/place/status
/planning_scene
/planning_scene_world
/play_motion/cancel
/play_motion/feedback
/play_motion/goal
/play_motion/result
/play_motion/status
/rosout
/rosout_agg
/scan
/sonar_base
/stop_closing_loop
/tab_vel
/text_marker
/tf
/tf_static
/torso_controller/command
/torso_controller/follow_joint_trajectory/cancel
/torso_controller/follow_joint_trajectory/feedback
/torso_controller/follow_joint_trajectory/goal
/torso_controller/follow_joint_trajectory/result
/torso_controller/follow_joint_trajectory/status
/torso_controller/increment/cancel
/torso_controller/increment/feedback
/torso_controller/increment/goal
/torso_controller/increment/result
/torso_controller/increment/status
/torso_controller/state
/trajectory_execution_event
/twist_marker
/xtion/depth/camera_info
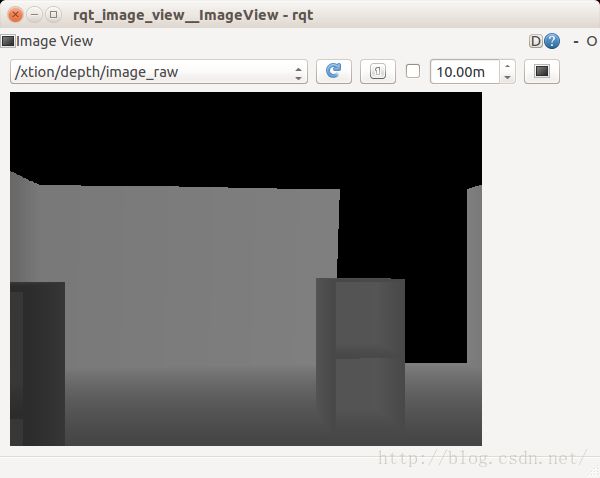
/xtion/depth/image_raw
/xtion/depth/points
/xtion/ir/image_raw
/xtion/ir/image_raw/compressed
/xtion/ir/image_raw/compressed/parameter_descriptions
/xtion/ir/image_raw/compressed/parameter_updates
/xtion/ir/image_raw/compressedDepth
/xtion/ir/image_raw/compressedDepth/parameter_descriptions
/xtion/ir/image_raw/compressedDepth/parameter_updates
/xtion/ir/image_raw/theora
/xtion/ir/image_raw/theora/parameter_descriptions
/xtion/ir/image_raw/theora/parameter_updates
/xtion/parameter_descriptions
/xtion/parameter_updates
/xtion/rgb/camera_info
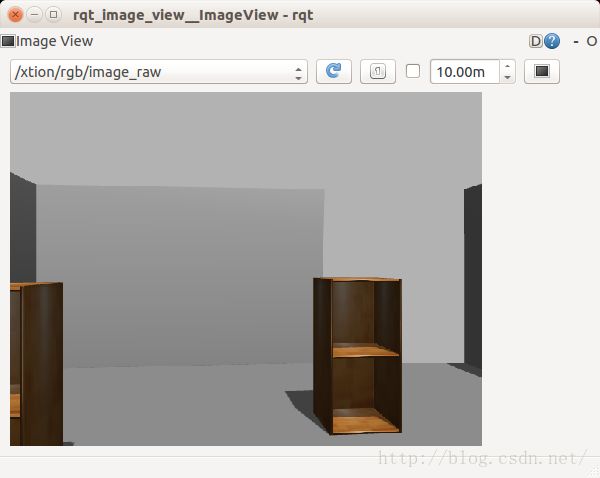
/xtion/rgb/image_raw
/xtion/rgb/image_raw/compressed
/xtion/rgb/image_raw/compressed/parameter_descriptions
/xtion/rgb/image_raw/compressed/parameter_updates
/xtion/rgb/image_raw/compressedDepth
/xtion/rgb/image_raw/compressedDepth/parameter_descriptions
/xtion/rgb/image_raw/compressedDepth/parameter_updates
/xtion/rgb/image_raw/theora
/xtion/rgb/image_raw/theora/parameter_descriptions
/xtion/rgb/image_raw/theora/parameter_updates
/xtion/rgb/points
--rostopic pub -1 /mobile_base_controller/cmd_vel geometry_msgs/Twist -- '[0.0, 0.0, 0.0]' '[0.0, 0.0, 10.0]'

--rosrun image_view image_view image:=/xtion/depth/image_raw

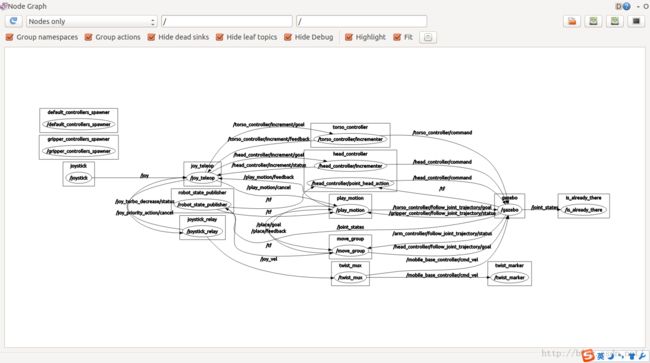
--rosrun rqt_graph rqt_graph
--rosrun rqt_reconfigure rqt_reconfigure
其他常用命令
--rosrun rqt_runtime_monitor rqt_runtime_monitor
--rosrun rqt_robot_monitor rqt_robot_monitor
--rosrun rqt_plot rqt_plot
--rosrun rqt_gui rqt_gui
--rosrun rqt_image_view rqt_image_view
--rosrun rqt_rviz rqt_rviz
--rosbag