Python-OpenCV基本操作
基本属性
- cv2.imread(文件名,属性) 读入图像
属性:指定图像用哪种方式读取文件
- cv2.IMREAD_COLOR:读入彩色图像,默认参数,Opencv 读取彩色图像为BGR模式 !!!注意
- cv2.IMREAD_GRAYSCALE:读入灰度图像。
- cv2.imshow(窗口名,图像文件) 显示图像
可以创建多个窗口 - cv2.waitKey() 键盘绑定函数
函数等待特定的几毫秒,看是否由键盘输入。 - cv2.namedWindow(窗口名,属性) 创建一个窗口
属性:指定窗口大小模式
- cv2.WINDOW_AUTOSIZE:根据图像大小自动创建大小
- cv2.WINDOW_NORMAL:窗口大小可调整
- cv2.destoryAllWindows(窗口名) 删除任何建立的窗口
代码实例:
import cv2
img=cv2.imread('test.py',cv2.IMREAD_COLOR)
cv2.namedWindow('image',cv2.WINDOW_NORMAL)
cv2.imshow('image',img)
cv2.waitKey(0)
cv2.destoryAllWindows()
- cv2.imwrite(保存图像名,需保存图像) 保存图像
代码实例:
import cv2
img=cv2.imread('test.png',0)
cv2.imshow('image',img)
k=cv2.waitKey(0)
if k==27: #等待 ESC 键
cv2.destoryAllWindows()
elif k==ord('s') #等待 's' 键来保存和退出
cv2.imwrite('messigray.png',img)
cv2.destoryAllWindows()
对于图像的一些操作
0x01. 获取图片属性
import cv2
img=img.imread('test.png')
print img.shape
#(768,1024,3)
print img.size
#2359296 768*1024*3
print img.dtype
#uint8
0x02. 输出文本
在处理图片时,将一些信息直接以文字的形式输出在图片上
cv2.putText(图片名,文字,坐标,文字颜色)
0x03. 缩放图片
实现缩放图片并保存,在使用OpenCV时常用的操作。cv2.resize()支持多种插值算法,默认使用cv2.INTER_LINEAR,缩小最适合使用:cv2.INTER_AREA,放大最适合使用:cv2.INTER_CUBIC或cv2.INTER_LINEAR。
res=cv2.resize(image,(2*width,2*height),interpolation=cv2.INTER_CUBIC)
或者:
res=cv2.resize(image,None,fx=2,fy=2,interpolation=cv2.INTER_CUBIC)
此处None本应该是输出图像的尺寸,因为后边设置了缩放因子
0x04. 图像平移
cv2.warpAffine(src, M, dsize[, dst[, flags[, borderMode[, borderValue]]]])
平移就是将图像换个位置,如果要沿(x,y)方向移动,移动距离为(tx,ty),则需要构建偏移矩阵M。
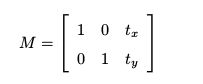
例如 平移图片(100,50)
import cv2
img=cv2.imread('test.png',1)
rows,cols,channel=img.shape
M=np.float32([[1,0,100],[0,1,50]])
dst=cv2.warpAffine(img,M,(cols,rows))
cv2.imshow('img',dst)
cv2.waitKey(0)
cv2.destoryALLWindows()
其中 (cols,rows)代表输出图像的大小,M为变换矩阵,100代表x的偏移量,50代表y的偏移量,单位为像素。
0x05. 图像旋转
OpenCV中首先需要构造一个旋转矩阵,通过cv2.getRotationMatrix2D获得。
import cv2
img=cv2.imread('test.png',0)
rows,cols=img.shape
#第一个参数为旋转中心,第二个为旋转角度,第三个为旋转后的缩放因子
M=cv2.getRotationMatrix2D((cols/2,rows/2),45,0.6)
#第三个参数为图像的尺寸中心
dst=cv2.warpAffine(img,M,(2*cols,2*rows))
cv2.imshow('img',dst)
cv2.waitKey(0)
cv2.destoryALLWindows()
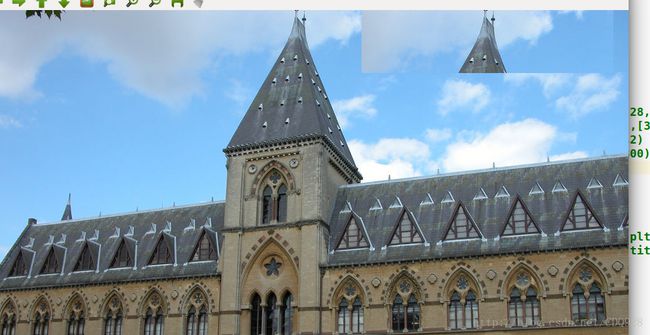
0x06. 仿射变换
在仿射变换中,原图中所有的平行线在结果图像中同样平行。为了创建偏移矩阵,需要在原图像中找到三个点以及它们在输出图像中的位置。然后OpenCV中提供了cv2.getAffineTransform创建2*3的矩阵,最后将矩阵传给函数cv2.warpAffine。
import cv2
import matplotlib.pyplot as plt
import numpy as np
img=cv2.imread('test.png')
rows,cols,ch=img.shape
pts1=np.float32([[50,50],[200,50],[50,200]])
pts2=np.float32([[10,100],[200,50],[100,250]])
M=cv2.getAffineTransform(pts1,pts2)
dst=cv2.warpAffine(img,M,(cols,rows))
plt.subplot(121),plt.imshow(img),plt.title('Input')
plt.subplot(122),plt.imshow(dst),plt.title('Output')
plt.show()
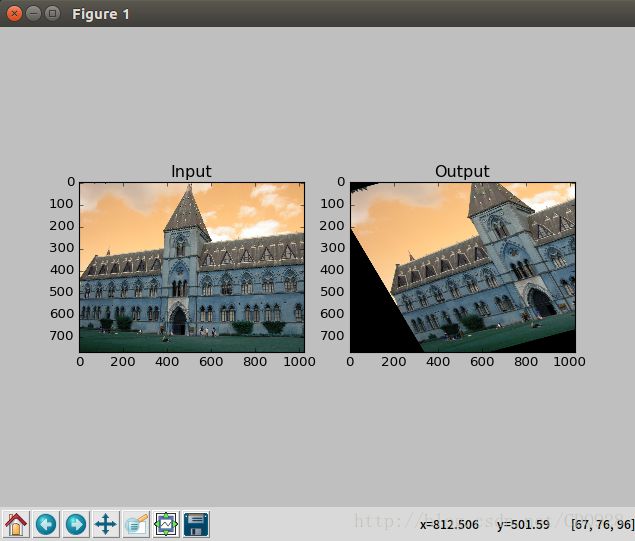
0x07. 透视变换
视角变换,需要一个3*3变换矩阵。在变换前后要保证直线还是直线。构建此矩阵需要在输入图像中找寻4个点,以及在输出图像中对应的位置。这四个点中的任意三个点不能共线。变换矩阵OpenCV提供cv2.getPerspectiveTransform()构建。然后将矩阵传入函数cv2.warpPerspective。
import cv2
import numpy as np
import matplotlib.pyplot as plt
img=cv2.imread('test.png')
rows,cols,ch=img.shape
pts1=np.float32([[56,65],[368,52],[28,387],[389,390]])
pts2=np.float32([[0,0],[300,0],[0,300],[300,300]])
M=cv2.getPerspectiveTransform(pts1,pts2)
dst=cv2.warpPerspective(img,M,(300,300))
plt.subplot(121),plt.imshow(img),plt.title('Input')
plt.subplot(122),plt.imshow(dst),plt.title('Output')
plt.show()
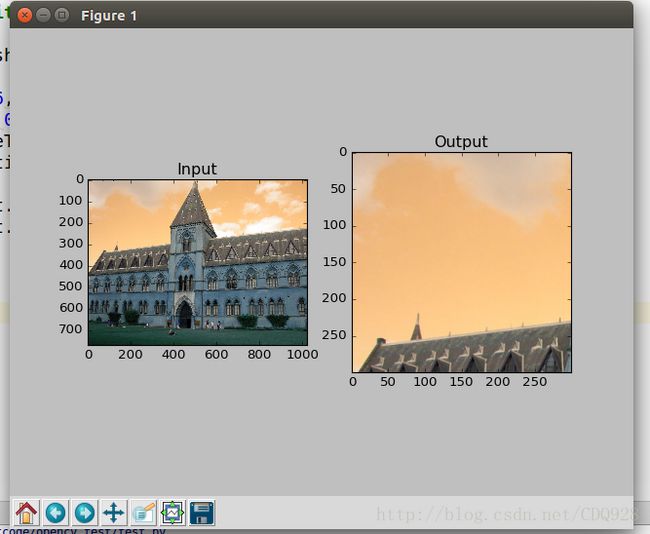
0x09. 图像 regions of Interest
有时需要对一副图像的特定区域进行操作,ROI使用Numpy索引来获得的。
import cv2
import numpy as np
import matplotlib.pyplot as plt
image=cv2.imread('test.png')
rows,cols,ch=image.shape
tall=image[0:100,300:700]
image[0:100,600:1000]=tallall
cv2.imshow("image",image)
cv2.waitKey(0)
cv2.destoryALLWindows()
0x10. 通道的拆分/合并处理
有时需要对BGR三个通道分别进行操作。这时需要将BGR拆分成单个通道。同时有时需要把独立通道的图片合并成一个BGR图像。
使用OpenCV库函数版本
import cv2
import numpy as np
import matplotlib.pyplot as plt
image=cv2.imread('pitt1.jpg')
rows,cols,ch=image.shape
#拆分通道,cv2.split()是一个比较耗时的操作。只有需要时使用,尽量Numpy
b,g,r=cv2.split(image)
print b.shape
#(768,1024)
#合并通道
image=cv2.merge(b,g,r)
使用Numpy索引版本:
import cv2
import numpy as np
import matplotlib.pyplot as plt
image=cv2.imread('pitt1.jpg')
rows,cols,ch=image.shape
#直接获取
b=img[:,:,0]