激光雷达的地面-非地面分割和pcl_ros实践
作者简介:申泽邦(Adam Shan),兰州大学在读硕士研究生,主攻无人驾驶,深度学习;
原文地址:https://blog.csdn.net/AdamShan/article/details/82901295
在无人驾驶的雷达感知中,将雷达点云地面分割出来是一步基本的操作,这一步操作主要能够改善地面点对于地面以上的目标的点云聚类的影响。本文首先带大家入门pcl_ros,首先我们使用pcl_ros编写一个简单的ros节点,对输入点云进行Voxel Grid Filter。接着我们在此实践的基础上实现点云地面和非地面的分割节点。本人近期处于毕业年,未来计划在基于激光雷达的半自动高精度制图以及高精度地图静物过滤中开展毕业论文研究,所以未来半年专栏的文章会主要集中在激光雷达感知和制图方向。
PCL基本入门
PCL是一个开源的点云处理库,是在吸收了前人点云相关研究基础上建立起来的大型跨平台开源C++编程库,它实现了大量点云相关的通用算法和高效数据结构,包含点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建、可视化等大量开源代码。支持多种操作系统平台,可在Windows、Linux、Android、Mac OS X、部分嵌入式实时系统上运行。如果说OpenCV是2D信息获取与处理的结晶,那么PCL就在3D信息获取与处理上具有同等地位。ROS kinetic完整版中本身已经包含了pcl库,同时ROS自带的pcl_ros 包可以连接ROS和PCL库。我们从一个简单的Voxel Grid Filter的ROS节点实现来了解一下PCL在ROS中的基本用法,同时了解PCL中的一些基本数据结构:
在ROS项目中引入PCL库
在此我们假定读者已经自行安装好ROS kinetic 的完整版,首先在我们的catkin workspace中新建一个package,我们将它命名为pcl_test,可以通过如下指令生成workspace和package:
cd ~
mkdir -p pcl_ws/src
cd pcl_ws
catkin_make
source devel/setup.bash
cd src
catkin_create_pkg pcl_test roscpp sensor_msgs pcl_ros
这样,我们就新建了一个workspace,用于学习PCL,同时新建了一个名为pcl_test的package,这个ROS包依赖于roscpp,sensor_msgs, pcl_ros这几个包,我们修改pcl_test包下的CMakeList文件以及package.xml配置文件,如下:
package.xml 文件:
pcl_test
0.0.1
The pcl_test package
adam
MIT
catkin
roscpp
sensor_msgs
pcl_ros
roscpp
sensor_msgs
pcl_ros
CMakeList.txt 文件:
cmake_minimum_required(VERSION 2.8.3)
project(pcl_test)
add_compile_options(-std=c++11)
find_package(catkin REQUIRED COMPONENTS
pcl_ros
roscpp
sensor_msgs
)
catkin_package(
INCLUDE_DIRS include
CATKIN_DEPENDS roscpp sensor_msgs pcl_ros
)
include_directories(
include
${catkin_INCLUDE_DIRS}
)
link_directories(${PCL_LIBRARY_DIRS})
add_executable(${PROJECT_NAME}_node src/pcl_test_node.cpp src/pcl_test_core.cpp)
target_link_libraries(${PROJECT_NAME}_node
${catkin_LIBRARIES}
${PCL_LIBRARIES}
)
package.xml的内容很简单,实际上就是这个包的描述文件,build_depend 和 run_depend 两个描述符分别指定了程序包编译和运行的依赖项,通常是所用到的库文件的名称。在这里我们指定了三个编译和运行时依赖项,分别是roscpp(编写C++ ROS节点),sensor_msgs(定义了激光雷达的msg),pcl_ros(连接ROS和pcl库)。
同样的,在CMakeList中,我们通过find_package查找这三个包的路径,然后将三个包添加到 CATKIN_DEPENDS, 在使用pcl库前,需要将PCL库的路径链接,通过link_directories(${PCL_LIBRARY_DIRS})来完成,并在最后的target_link_libraries中添加${PCL_LIBRARIES}。
编写节点进行Voxel Grid Filter
接着我们在pcl_test/src目录下新建pcl_test_node.cpp文件:
#include "pcl_test_core.h"
int main(int argc, char **argv)
{
ros::init(argc, argv, "pcl_test");
ros::NodeHandle nh;
PclTestCore core(nh);
return 0;
}
此文件仅包含main函数,是节点的入口,编写头文件include/pcl_test_core.h:
#pragma once
#include
#include
#include
#include
#include
#include
#include
class PclTestCore
{
private:
ros::Subscriber sub_point_cloud_;
ros::Publisher pub_filtered_points_;
void point_cb(const sensor_msgs::PointCloud2ConstPtr& in_cloud);
public:
PclTestCore(ros::NodeHandle &nh);
~PclTestCore();
void Spin();
};
以及pcl_test_core.cpp:
#include "pcl_test_core.h"
PclTestCore::PclTestCore(ros::NodeHandle &nh){
sub_point_cloud_ = nh.subscribe("/velodyne_points",10, &PclTestCore::point_cb, this);
pub_filtered_points_ = nh.advertise("/filtered_points", 10);
ros::spin();
}
PclTestCore::~PclTestCore(){}
void PclTestCore::Spin(){
}
void PclTestCore::point_cb(const sensor_msgs::PointCloud2ConstPtr & in_cloud_ptr){
pcl::PointCloud::Ptr current_pc_ptr(new pcl::PointCloud);
pcl::PointCloud::Ptr filtered_pc_ptr(new pcl::PointCloud);
pcl::fromROSMsg(*in_cloud_ptr, *current_pc_ptr);
pcl::VoxelGrid vg;
vg.setInputCloud(current_pc_ptr);
vg.setLeafSize(0.2f, 0.2f, 0.2f);
vg.filter(*filtered_pc_ptr);
sensor_msgs::PointCloud2 pub_pc;
pcl::toROSMsg(*filtered_pc_ptr, pub_pc);
pub_pc.header = in_cloud_ptr->header;
pub_filtered_points_.publish(pub_pc);
}
这个节点的功能是订阅来自/velodyne_points话题的点云数据,使用PCL内置的Voxel Grid Filter对原始的点云进行降采样,将降采样的结果发布到/filtered_points话题上。我们重点看回调函数PclTestCore::point_cb,在该回调函数中,我们首先定义了两个点云指针,在PCL库中,pcl::PointCloud是最基本的一种数据结构,它表示一块点云数据(点的集合),我们可以指定点的数据结构,在上述实例中,采用了pcl::PointXYZI这种类型的点。pcl::PointXYZI结构体使用(x, y, z, intensity)这四个数值来描述一个三维度空间点。
intensity,即反射强度,是指激光雷达的激光发射器发射激光后收到的反射的强度,通常所说的16线,32线激光雷达,其内部实际是并列纵排的多个激光发射器,通过电机自旋,产生360环视的点云数据,不同颜色的物体对激光的反射强度也是不同的,通常来说,白色物体的反射强度(intensity)最强,对应的,黑色的反射强度最弱。
通常使用sensor_msgs/PointCloud2.h做为点云数据的消息格式,可使用pcl::fromROSMsg和pcl::toROSMsg将sensor_msgs::PointCloud2与pcl::PointCloud进行转换。
为了使用Voxel Grid Filter对原始点云进行降采样,只需定义pcl::VocelGrid并且指定输入点云和leaf size,在本例中,我们使用leaf size为 0.2。Voxel Grid Filter将输入点云使用0.2m*0.2m*0.2m的立方体进行分割,使用小立方体的 形心(centroid) 来表示这个立方体的所有点,保留这些点作为降采样的输出。
验证效果
我们写一个launch文件pcl_test.launch来启动这个节点:
回到workspace 目录,使用catkin_make 编译:
catkin_make
启动这个节点:
roslaunch pcl_test pcl_test.launch
新建终端,并运行我们的测试bag(测试bag下载链接:https://pan.baidu.com/s/1HOhs9StXUmZ_5sCALgKG3w)
rosbag play --clock test.bag
打开第三个终端,启动Rviz:
rosrun rviz rviz
配置Rviz的Frame为velodyne,并且加载原始点云和过滤以后的点云的display
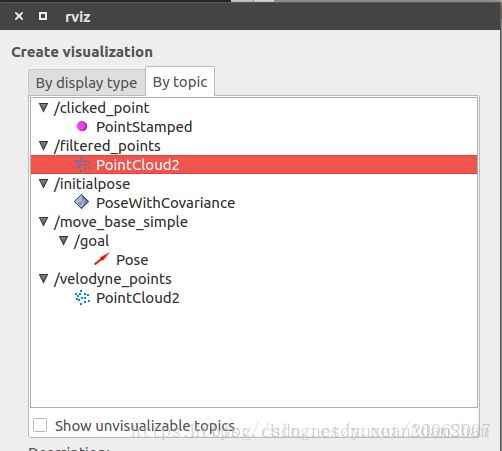
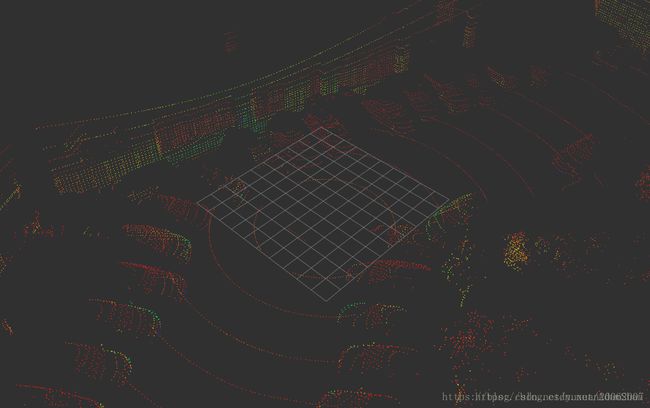
原始点云:

降采样之后的点云(即我们的节点的输出):
点云地面过滤
过滤地面是激光雷达感知中一步基础的预处理操作,因为我们环境感知通常只对路面上的障碍物感兴趣,且地面的点对于障碍物聚类容易产生影响,所以在做Lidar Obstacle Detection之前通常将地面点和非地面点进行分离。在此文中我们介绍一种被称为Ray Ground Filter的路面过滤方法,并且在ROS中实践。
由于代码过多,文章只节选关键部分讲解,完整代码见文末链接。
对点云剪裁和过滤
要分割地面和非地面,那么过高的区域首先就可以忽略不计,我们先对点云进行高度的裁剪。我们实验用的bag在录制的时候lidar的高度约为1.78米,我们剪裁掉1.28米以上的部分,代码如下:
void PclTestCore::clip_above(double clip_height, const pcl::PointCloud::Ptr in,
const pcl::PointCloud::Ptr out)
{
pcl::ExtractIndices cliper;
cliper.setInputCloud(in);
pcl::PointIndices indices;
#pragma omp for
for (size_t i = 0; i < in->points.size(); i++)
{
if (in->points[i].z > clip_height)
{
indices.indices.push_back(i);
}
}
cliper.setIndices(boost::make_shared(indices));
cliper.setNegative(true); //ture to remove the indices
cliper.filter(*out);
}
其中,
#pragma omp for语法OpenMP的并行化语法,即希望通过OpenMP并行化执行这条语句后的for循环,从而起到加速的效果。
角度微分和地面/非地面判断
Ray Ground Filter算法的核心是以射线(Ray)的形式来组织点云。我们现在将点云的 (x, y, z)三维空间降到(x,y)平面来看,计算每一个点到车辆x正方向的平面夹角 θ, 我们对360度进行微分,分成若干等份,每一份的角度为0.18度,这个微分的等份近似的可以看作一条射线,如下图所示,图中是一个激光雷达的纵截面的示意图,雷达由下至上分布多个激光器,发出如图所示的放射状激光束,这些激光束在平地上即表现为,图中的水平线即为一条射线:
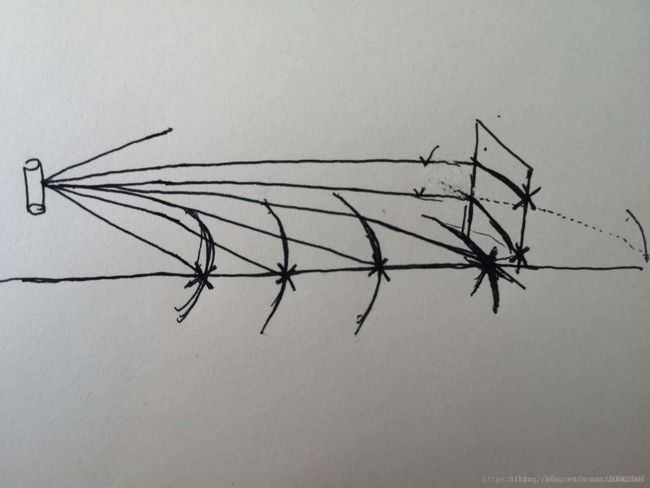
0.18度是VLP32C雷达的水平光束发散间隔。
为了方便地对点进行半径和夹角的表示,我们使用如下数据结构代替pcl::PointCloudXYZI:
struct PointXYZIRTColor
{
pcl::PointXYZI point;
float radius; //cylindric coords on XY Plane
float theta; //angle deg on XY plane
size_t radial_div; //index of the radial divsion to which this point belongs to
size_t concentric_div; //index of the concentric division to which this points belongs to
size_t original_index; //index of this point in the source pointcloud
};
typedef std::vector PointCloudXYZIRTColor;
其中,radius表示点到lidar的水平距离(半径),即:
![]()
theta是点相对于车头正方向(即x方向)的夹角,计算公式为:
![]()
我们用radial_div和concentric_div分别描述角度微分和距离微分。对点云进行水平角度微分之后,可得到:3600.18=2000
0.18360=2000 条射线,将这些射线中的点按照距离的远近进行排序,如下所示:
//将同一根射线上的点按照半径(距离)排序
#pragma omp for
for (size_t i = 0; i < radial_dividers_num_; i++)
{
std::sort(out_radial_ordered_clouds[i].begin(), out_radial_ordered_clouds[i].end(),[](const PointXYZIRTColor &a, const PointXYZIRTColor &b) { return a.radius < b.radius; });
}
通过判断射线中前后两点的坡度是否大于我们事先设定的坡度阈值,从而判断点是否为地面点。代码如下:
void PclTestCore::classify_pc(std::vector &in_radial_ordered_clouds,
pcl::PointIndices &out_ground_indices,
pcl::PointIndices &out_no_ground_indices)
{
out_ground_indices.indices.clear();
out_no_ground_indices.indices.clear();
#pragma omp for
for (size_t i = 0; i < in_radial_ordered_clouds.size(); i++) //sweep through each radial division 遍历每一根射线
{
float prev_radius = 0.f;
float prev_height = -SENSOR_HEIGHT;
bool prev_ground = false;
bool current_ground = false;
for (size_t j = 0; j < in_radial_ordered_clouds[i].size(); j++) //loop through each point in the radial div
{
float points_distance = in_radial_ordered_clouds[i][j].radius - prev_radius;
float height_threshold = tan(DEG2RAD(local_max_slope_)) * points_distance;
float current_height = in_radial_ordered_clouds[i][j].point.z;
float general_height_threshold = tan(DEG2RAD(general_max_slope_)) * in_radial_ordered_clouds[i][j].radius;
//for points which are very close causing the height threshold to be tiny, set a minimum value
if (points_distance > concentric_divider_distance_ && height_threshold < min_height_threshold_)
{
height_threshold = min_height_threshold_;
}
//check current point height against the LOCAL threshold (previous point)
if (current_height <= (prev_height + height_threshold) && current_height >= (prev_height - height_threshold))
{
//Check again using general geometry (radius from origin) if previous points wasn't ground
if (!prev_ground)
{
if (current_height <= (-SENSOR_HEIGHT + general_height_threshold) && current_height >= (-SENSOR_HEIGHT - general_height_threshold))
{
current_ground = true;
}
else
{
current_ground = false;
}
}
else
{
current_ground = true;
}
}
else
{
//check if previous point is too far from previous one, if so classify again
if (points_distance > reclass_distance_threshold_ &&
(current_height <= (-SENSOR_HEIGHT + height_threshold) && current_height >= (-SENSOR_HEIGHT - height_threshold)))
{
current_ground = true;
}
else
{
current_ground = false;
}
}
if (current_ground)
{
out_ground_indices.indices.push_back(in_radial_ordered_clouds[i][j].original_index);
prev_ground = true;
}
else
{
out_no_ground_indices.indices.push_back(in_radial_ordered_clouds[i][j].original_index);
prev_ground = false;
}
prev_radius = in_radial_ordered_clouds[i][j].radius;
prev_height = in_radial_ordered_clouds[i][j].point.z;
}
}
}
这里有两个重要参数,一个是local_max_slope_,是我们设定的同条射线上邻近两点的坡度阈值,一个是general_max_slope_,表示整个地面的坡度阈值,这两个坡度阈值的单位为度(degree),我们通过这两个坡度阈值以及当前点的半径(到lidar的水平距离)求得高度阈值,通过判断当前点的高度(即点的z值)是否在地面加减高度阈值范围内来判断当前点是为地面。
在地面判断条件中,
current_height <= (-SENSOR_HEIGHT + general_height_threshold) && current_height >= (-SENSOR_HEIGHT - general_height_threshold)中SENSOR_HEIGHT表示lidar挂载的高度,-SNESOR_HEIGHT即表示水平地面。
分割效果
我们使用上文中的bag来验证地面分割节点的工作效果。运行bag并且运行我们的节点,打开Rviz,加载两个点云display,效果如下所示:

其中,红色的点为我们分割出来的地面,来自于/filtered_points_ground话题,白色的点为非地面,来自于/filtered_points_no_ground 话题。分割出非地面点云之后,我们就可以让Lidar Detection的代码工作在这个点云上了,从而排除了地面对于Lidar聚类以及Detection的影响。
完整代码见:https://download.csdn.net/download/adamshan/10696443