使用PCA拟合平面(Plane Fitting using PCA)
定义问题
给定一组3D点 {pi} ,我们想找到这组3D点满足的平面参数,即平面的法向量 n 和中心 q :
当然在实际数据中(1)式一般是不可能严格满足的,因此可以定义如下函数:
上式表示点到面的符号距离,即就是这个距离可能为正也可能为负
注意: n 表示平面的法向量,并且为单位向量: nTn=1
求解问题
现在这个问题可以转化为一个最小二乘问题:
第一步先固定平面法向量求 q ,则(3)对 q 求偏导并且令导数为零:
求解(4)式可以得到最优的平面中心 q∗ :
这个结果和我们直观理解一致,并且这个结果与平面法向量的取值无关。
或者可以从另外一个角度去理解,直观使用(5)式就可以求出一组3D点的中心,(4)式从另外一个角度验证了(5)式的正确性
第二步求解平面的法向量 n , 我们可以将(5)式带入(3)式中得如下结果:
其中 B(q∗)≜A(q∗)A(q∗)⊺ ,由于 A(q) 是一个 3×|{pi}| 维的矩阵,所以 B(q) 是一个 3×3 维的正定矩阵,现在问题可以表示为如下形式:
上式的形式和PCA的目标函数非常相似:
唯一的区别就在于PCA求的是目标函数的最大值,而我们的问题求的是最小值。所以只需要对 B(q∗) 进行分解,最小特征值对应的特征向量就是平面的法向量。当然我们也可以从直观角度去理解,对于一组3D的点平面的法向量一定是最不重要的那个投影向量(理论情况下所有平面上的点在法向量上的投影为零)。
代码
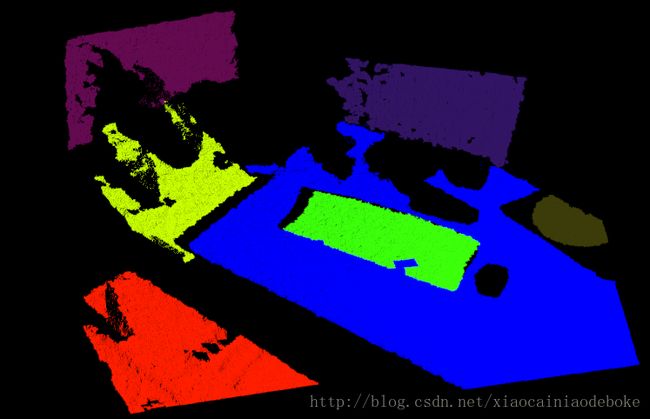
使用PCA拟合平面是我在看冯晨的《Fast Plane Extraction in Organized Point Clouds Using Agglomerative Hierarchical Clustering》论文时看到的,大家有兴趣的可以看看,代码地址,运行结果如下图所示
PCA
下面简单说说主成分分析(PCA),主要是是为了备忘。
记 x1,...,xp 为p个原始特征,设新的特征 ξi,i=1,...,p 是原始特征的线性组合
为了统一 ξi 的尺度,不妨要求线性组合系数的模为1,即:
将(9)式写成矩阵的形式:
其中, ξ 是由新特征 ξi 组成的向量, A 是特征变换矩阵。要求解的是最优的正交变换矩阵 A ,它使得新特征 ξi 的方差达到极致。正交变换保证了新特征之间不相关,而新特征的方差越大,则样本在该维特征上的差异就越大,因而这一特征就越重要。
考虑第一个新特征 ξi :
它的方差为
其中, ∑ 是 x 的协方差矩阵, 可以用样本来估计, E[.] 是数学期望。要在(10)式约束下最大化 ξ1 的方差,这等价于求下面拉格朗日函数的极值:
其中, v 是拉格朗日乘子, 将(14)式对 a1 求导并令其为零,得到最优解 a1 满足
这是协方差矩阵 ∑ 的特征值, 即 a1 是矩阵 ∑ 的特征向量, v 是对应的特征值。 把(15)式带入(13)式中,可得:
因此,最后的 a1 是矩阵 ∑ 最大特征值对应的特征向量。 ξ1 称为第一主成分, 它在原始特征的所有线性组合中方差是最大的。
协方差矩阵 ∑ 共有 p 个特征值 λi,i=1,...,p (包括可能相等的特征值和可能为零的特征值),把他们降序排列。按照上面相同的方式,可以得出有对应这些特征向量构造的 p 个主成分 ξi,i=i,...,p ,全部主成分的方差之和为:
变换矩阵 A 的各个列向量是由 ∑ 的正交特征向量组成的, 因此 AT=A−1 , 即 A 是正交矩阵。 从 ξ 到 x 的逆变换为:
通常把主成分零均值化,即
这种平移并不影响主成分的方向。
参考资料
[1] Chen Feng, Fast Plane Extraction in Organized Point Clouds Using Agglomerative Hierarchical Clustering
[2] 主成分分析(PCA)原理详解
[3] 深入理解拉格朗日乘子法(Lagrange Multiplier) 和KKT条件
[4] 张学工, 模式识别(第三版), 主成分分析, 163-164