线性规划:单纯形算法
作者 dylanFrank(滔滔)
转载请联系作者 原文链接:http://blog.csdn.net/Dylan_Frank/article/details/77876006
这里简要总结一下线性规划的单纯形算法,做如下几个方面的总结,其余以后再来填坑.
- 几何表示
- 标准型的代数解法
- 其他情形与标准型的互换
- 退化情形
几何表示
先看这样一个问题
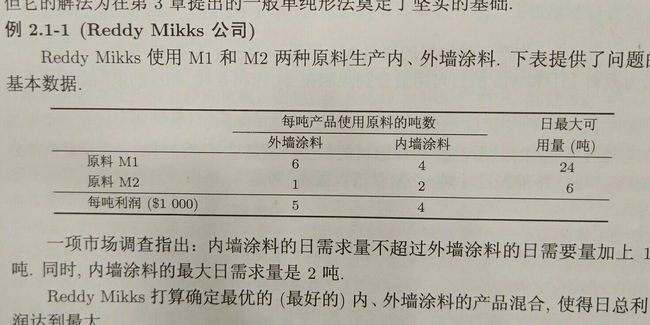
我们很容易用下面的数学语言来描述这个问题
如果我们用几何来描述这个问题的话则是这样的
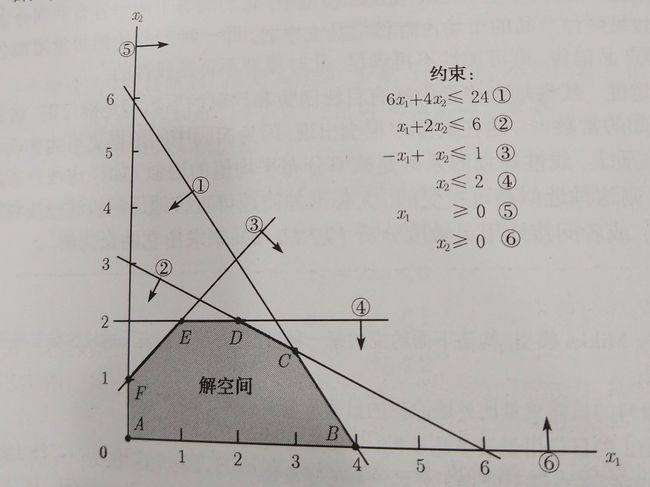
其中阴影部分表示可行域(feasible region)
黑色加粗的线条表示边界
两个边界的交点称为角点(corner-point CP)
在可行域上的角点称谓 角点可行解(CPF)
共享一边的角点称为角点邻接角点(adj CPF)
我们在这里不加证明的指出(以后有空再填坑),线性规划的最优解一定在 CPF ,并且有优性测试 (optimal test),若某一个CPF 的相邻角点的(目标函数)值都不比这个CPF优,则这个CPF 就是最优解.
由此我们不难得到一个简单的算法:
从一个初始CPF开始,沿着比它更优的
adj CPF 前行,若找到一个 CPF 这个CPF的所有 adj CPF不比 它优,则这就是最优解.比如上例中会在C点找到最优解
这就是单纯形算法,不过几何表示毕竟不能让计算机简单执行,因此我们需要将其转化为代数形式。
代数形式
线性规划的标准代数表达,(本文采用《introduction to operation research》清华大学影印版) 的表示.
我们后面会发现其他的形式都可以很容易表示为标准形式.
单纯形(simplex) 算法
我们看到,由上面几何版的simplex 算法,我们首先需要一个初始解,为了方便找到初始解,同时也为了能让计算机好进行运算,需要把不等式转化为等式,这里我们引入 松弛变量(slack variable),对每个函数约束我们都引入一个松弛变量(slack variable) xn+j,xn+j≥0 比如上面的例子
6x1+4x2≤24
引入松弛变量(以后简写SV) x3, 满足 x3≥0
6x1+4x2+x3=24
可以发现这个式子和上面的约束是等价的(将 x3≥0 移到一边)
引入SV 的形式成为增广形式,(argument form),第一个例子的增广形式为
这种形式的解称为增广解,需要说明的是这两种解是一致的,增广解的增广变量恰好是用原式表示的,如最优解中一定有:
x3=24−(6x1+4x2)
基解(basic solution): 这个对应的是原始形式中的角点解的增广.下面简单说一下,基解的性质:
- #basic var (基本变量的数目)=函数限制的数目。
- # non-basic var = #var - #basic var = 线性规划系统的自由度
- non-basic var =0
- 如果 基本变量满足非负限制,则基解称为 基本可行解(basic feasible solution BF),我们后面需要关注的就是这个基本可行解BF,这对应的是原始形式中的CPF 的扩充。(非松弛变量为0是初始解)
下面介绍单纯形算法:
- 初始化,解除限制,引入松弛变量,将目标函数写成 (z−(sumni=1cixi)=0) 记作第0行
- 最优性测试,选出第0行中系数最小的变量(负的最多),判断系数是否小于0,若是结束输出最优解,否则进入迭代,称选中变量为进基变量(变量不为0,成为基本变量)
- 进入迭代,进基变量对应的列称为轴列,pivot col,进行最优比率测试,判断,进基变量能最大增加多少. 对于轴列中系数大于0的列,用等式右边值除以系数得到每个等式的比率.,最小的一个作为瓶颈行,称为轴行(pivot row)
- 用轴行进行高斯肖元,回到第二步.
结合具体的例子就好理解了,如上面的第一个例子
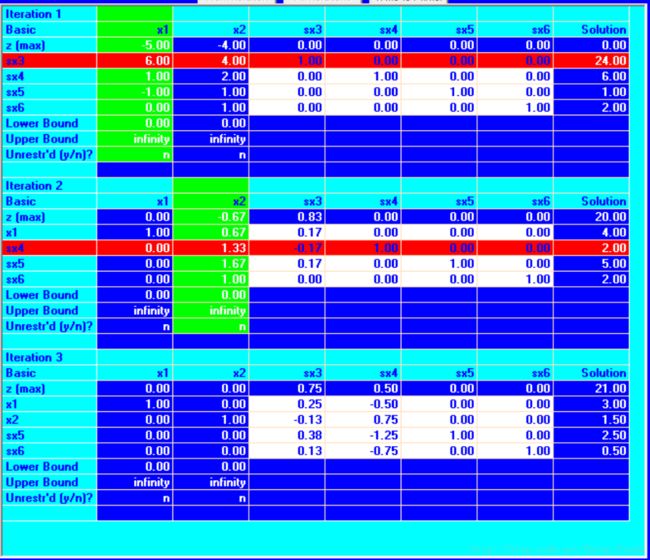
使用[taor] 链接:http://pan.baidu.com/s/1hsQUkqo 密码:1ihg《运筹学导论初级篇》 人民邮电出版软件
第一次迭代, x1 的系数最小,且为负,选为pivot col,对其进行最小比率测试,第一行最小,选做pivot row,用它进行高斯肖元,得到第二次迭代的表格. x3 成为非基变量…依次下去得到第3次迭代结果.
需要注意的是第一列标明的变量对应的值为右边的解值.第一行变量中为正的变量取0.
非标准型与标准型的转化
等式限制
处理等式限制 ∑ai∗xi=b ,有两种方法,一种是大M 方法,引入人工变量,一种是将其表示为如下形式
大M方法下面再介绍
负的右值限制
∑ai∗xi≤−b,b>0 ,乘一个负号变为 ∑−ai∗xi≥b
大于等于限制
如 0.6x1+0.4x2≥6 , 引入 x3>0 ,转化为等式
0.6x1+0.4x2−x3=6 ,这是等价的
目标函数最小值
目标函数乘-1
xi 边界为负
即如 xi≥−L ,令 x′i=xi−L
无界限制
即 xi∈(−inf,inf) ,
令 xi=x+i−x−i,x+i,x−i>0 ,需要注意的是若有很多变量均是无界限制,可以只取一个变量代替 x−i ,而不必对每个无界变量都引入两个变量.
未完待续…..