优化算法
优化算法
- 1 小批量梯度下降(Mini-batch gradient descent)
- 1.1 什么是小批量下降算法
- 1.2 如何设置batch的大小
- 2 指数加权平均
- 2.1 指数加权平均定义与步骤
- 2.2 参数 beta 的取值
- 2.3 偏差修正(Bias correction)
- 3 三个有效的优化算法
- 3.1 动量梯度下降算法(Gradient descent with momentum)
- 3.2 均方根传递 RMSprop (Root Mean Square prop)
- 3.3 Adam优化算法(Adaptive Moment Estimation)
- 4 学习率衰减(Learning rate decay)
- 5 局部最优与鞍点、停滞区
- 5.1 局部最优(Local Optima)与鞍点(Saddle Point)
- 5.2 停滞区(Plateaus)
1 小批量梯度下降(Mini-batch gradient descent)
1.1 什么是小批量下降算法
机器学习是一个高度依赖经验的不断重复的过程,需要训练很多模型才能找到一个最好用的。快速的优化算法、好的优化算法能够大幅提高我们的效率。
矢量化(vectorization)运算能够有效地一次性计算所有 m 个样本,而不是用一个具体的 for 循环来处理整个训练集。传统的梯度下降算法很好的利用了矢量化运算,但是 m 越大,参数更新就越慢。为了解决这个问题,可以这样做:
- 首先将你的训练集拆分成多个小型训练集,即小批量(mini_batch),比如说每一个小型训练集只有 64 个训练样本;
- 每处理一个 mini_batch 后就更新一次参数。
而这中方法被叫做小批量下降算法(MBGD)。

第 i 个小批量样本集可表示为 ( X { t } , Y { t } X^{\{t\}}, Y^{\{t\}} X{t},Y{t}) ,在小批量梯度下降中,对整个训练集,也就是所有 mini_batch 的一次遍历叫做一个 epoch。
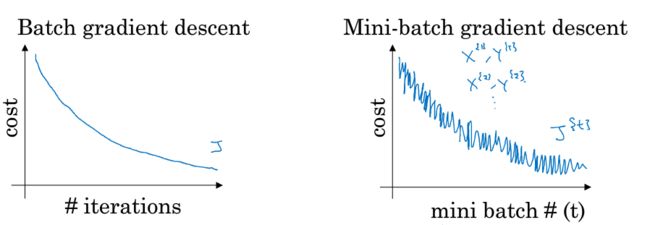
在梯度下降算法中 ,每一次迭代需要遍历整个训练集,对于迭代次数来说,代价函数 J 通常是单调递减的。
而在小批量梯度下降中,每次迭代都是使用不同的训练集,也就是使用不同的小块 (mini-batch) ,所以代价函数 J 并不一定每次迭代都会下降,它是一个振荡的曲线但是整体趋势必须是向下的。
1.2 如何设置batch的大小
先来看看两种极端的情况:
(1)当 batch = 训练样本总数 时,此时小批量梯度下降算法就相当于批量梯度下降(BGD),即普通的梯度下降算法。
优点: 一次处理整个训练集,从而能更准确地朝总体损失最小的方向移动。当目标函数为凸函数时,BGD一定能够得到全局最优
缺点: 当数据集很大时,一次处理整个训练集,计算量大,参数更新也就慢。所以普通梯度下降算法适合与数据集比较小的时候。
(2)当 batch = 1 时,此时小批量梯度下降算法就成了 随机梯度下降算法(SGD)。
优点: 每处理完一个样本就更新参数,从而参数更新的速度大大加快。
缺点: 一个样本不能反映出总体样本的误差,所以其准确性可能不如普通梯度下降算法高;可能会走很多弯路,出现徘徊现象;可能会收敛到局部最优,即使代价函数为强凸函数的情况下,此方法仍可能无法做到线性收敛。
而小批量梯度下降算法(MBGD),batch的取值则是介于 1 到训练样本总数之间,中和了批量梯度下降算法与随机梯度下降算法的优缺点。

在小批量梯度下降算法(MBGD)中,batch 一般取值为 2 的整数次幂,例如:16、32、64、128、256等。
(1)增大 batch 的影响:
a. 矢量化运算效率提高,但参数更新速度降低。
b.梯度下降的方向的准确度增高,震荡现象减少,收敛到全局最优的可能性增加。
(2)减小 batch 的影响:
a. 不能充分利用矢量化计算,但更新参数的速度提高。
b.梯度下降的方向的准确度降低。会出现震荡,收敛到局部最优的可能性增加。
2 指数加权平均
2.1 指数加权平均定义与步骤
指数加权平均(exponentially weighted averges):
在统计学上也被称为指数加权滑动平均,是指应用指数级降低的加权因子,使得较旧数据的权重都呈指数下降,但不会等于零。
求解步骤:
初始化: v 0 = 0 v_0=0 v0=0
求平均值: v t = β v t − 1 + ( 1 − β ) θ t v_t=βv_{t−1}+(1−β)θ_t vt=βvt−1+(1−β)θt
其中 β 为参数(取值介于 0 到 1 之间), v 0 v_0 v0 为初始平均值, v t v_t vt 为前 t t t 为条记录的平均值, θ t θ_t θt 为第 t t t 条记录实际值。
以伦敦某年365天的温度作为例,如下图,左边是对每天实际温度的记录,右边是对应的散点图。
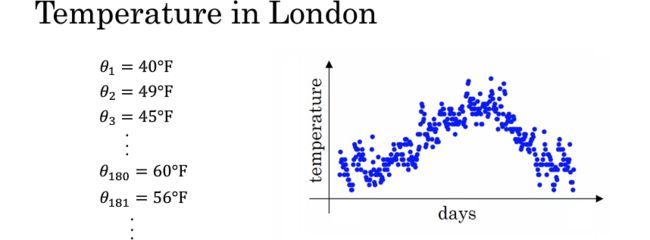
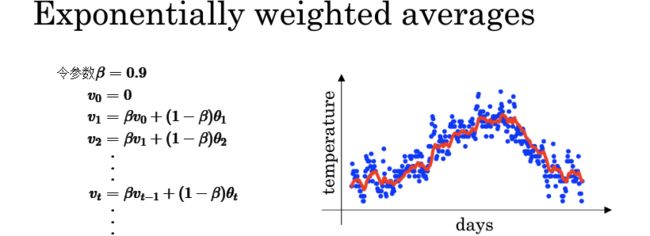
这些数据看起来好像有些噪声。如果想要计算数据的趋势,即温度的局部平均或滑动平均,可以用指数加权平均法。具体步骤如下图左,我们用 v t v_t vt 代表前 t t t 天的指数加权平均温度,结果用红色画出来,就会得到图右的红色曲线,称为每日温度的指数加权平均。
那么为什么叫指数加权平均呢?通过其公式层层代入,可以得到: v t = ( 1 − β ) θ t + ( 1 − β ) β θ t − 1 + ( 1 − β ) β 2 θ t − 2 + . . . + ( 1 − β ) β t − 1 θ 1 = 1 1 / ( 1 − β ) ∑ i = 0 t − 1 β i θ t − i v_t = (1-\beta)\theta_t + (1-\beta)\beta\theta_{t-1} + (1-\beta)\beta^2\theta_{t-2} + ...+(1-\beta)\beta^{t-1}\theta_1=\frac{1}{1/(1-\beta)}\sum_{i=0}^{t-1}\beta^i\theta_{t-i} vt=(1−β)θt+(1−β)βθt−1+(1−β)β2θt−2+...+(1−β)βt−1θ1=1/(1−β)1i=0∑t−1βiθt−i其中 β i \beta^i βi 介于 0 到 1 之间,相当于记录实际值 θ t − i \theta_{t-i} θt−i的权值,而这个权值又是呈指数减小的。 1 1 − β \frac{1}{1-\beta} 1−β1 则可以看作是对最近 1 1 − β \frac{1}{1-\beta} 1−β1 天的记录求平均值,所以这就是“指数加权平均”这个名字的由来。
2.2 参数 beta 的取值
其中参数 β \beta β 的值可以调整,可以认为 v t v_t vt 近似于 1 1 − β \frac{1}{1-\beta} 1−β1 天温度的平均。
β \beta β 的取值越大,得到的曲线会更平滑,因为你对更多天数的温度做了平均处理,因此曲线就波动更小。另一方面,这个曲线会右移,因为计算平均温度的天数增加,这个指数加权平均的公式在温度变化时,适应得更加缓慢,这就造成了一些延迟。
β \beta β 的取值越小,得到结果中会有更多的噪声,得到的曲线振荡现象就会越明显。但它可以更快地适应温度变化。

通过调整这个参数 β \beta β,就可以得到略微不同的效果。上图展示了 β \beta β 取两个极端值(0.5 和 0.98)和一个中间值(0.9)的指数加权平均结果曲线。通常 β \beta β 取中间的某个值效果最好,也就是这里的红色曲线,它对温度的平均比绿色或者黄色的曲线更好,因为它在平滑去噪的基础上更好的刻画了温度的变化趋势。
2.3 偏差修正(Bias correction)
当我们对一组数据进行指数加权平均运算时,在刚开始的几次运算得出的结果比实际值要小,随着参与计算的平均值的实际记录值越来越多,算出来的平均值也就越来越准确了。如果我们希望在开始的时候得到比较正确的平均值,那么可以利用偏差修正(Bias correction)技术,步骤如下:
- 求指数加权平均值: v t = β v t − 1 + ( 1 − β ) θ t v_t = \beta v_{t-1}+(1-\beta)\theta_t vt=βvt−1+(1−β)θt
- 执行偏差修正: v t = v t 1 − β t v_t = \frac{v_t }{1-\beta^t} vt=1−βtvt
可以看到,当 t t t 值足够大时,分母 1 − β t 1-\beta^t 1−βt 是趋向于 1 的,所以偏差修正值对结果将基本没有影响。也就是说在后期偏差修正发挥的作用就越来越小了。
在机器学习中,很多的指数加权平均运算,并不会使用偏差修正,因为大多数人更愿意在初始阶段用一个稍带偏差的值进行运算。不过,如果在初始阶段就开始考虑偏差,偏差修正可以帮我们尽早做出更好的估计。
3 三个有效的优化算法
3.1 动量梯度下降算法(Gradient descent with momentum)
在训练过程中,梯度下降算法会计算很多步,并且在朝着代价最低点靠近的过程中会伴随着上下波动(振荡),如下图蓝色轨迹所示。这种振荡会减慢梯度下降的速度,同时也让我们无法使用较大的学习率。学习率越大,振荡的幅度也就越大,严重时可能会像下图紫色轨迹那样发散出去。

为了加速梯度下降的进程,且能够使用较大的学习率,我们可以对反向传播得到的梯度进行指数加权平均运算,从而
减少梯度下降过程中的振荡,使梯度下降轨迹更加平滑。具体做法为:
初始化:
V d W V_{dW} VdW 初始化为与 d W dW dW 形状相同的全零矩阵
V d b V_{db} Vdb 初始化为与 d b db db 形状相同的全零矩阵
在第 t t t 次迭代中:
V d W = β 1 V d W + ( 1 − β 1 ) d W V_{dW}=\beta_1 V_{dW}+(1-\beta_1)dW VdW=β1VdW+(1−β1)dW
V d b = β 1 V d b + ( 1 − β 1 ) d b V_{db}=\beta_1 V_{db}+(1-\beta_1)db Vdb=β1Vdb+(1−β1)db
W = W − α V d W W=W-\alpha V_{dW} W=W−αVdW
b = b − α V d b b=b-\alpha V_{db} b=b−αVdb
这里 β 1 \beta_1 β1 通常取值为 0.9
3.2 均方根传递 RMSprop (Root Mean Square prop)
与动量梯度下降算法类似,它也可以加速梯度下降。步骤如下:
初始化:
S d W S_{dW} SdW 初始化为与 d W dW dW 形状相同的全零矩阵
S d b S_{db} Sdb 初始化为与 d b db db 形状相同的全零矩阵
在第 t t t 次迭代中:
S d W = β 2 S d W + ( 1 − β 2 ) ( d W ) 2 S_{dW}=\beta_2 S_{dW}+(1-\beta_2)(dW)^2 SdW=β2SdW+(1−β2)(dW)2
S d b = β 2 S d b + ( 1 − β 2 ) ( d b ) 2 S_{db}=\beta_2 S_{db}+(1-\beta_2)(db)^2 Sdb=β2Sdb+(1−β2)(db)2
W = W − α d W S d W + ϵ W=W-\alpha \frac{dW}{\sqrt{S_{dW}+\epsilon}} W=W−αSdW+ϵdW
b = b − α d b S d b + ϵ b=b-\alpha \frac{db}{\sqrt{S_{db}+\epsilon}} b=b−αSdb+ϵdb
这里 β 2 \beta_2 β2 通常取值为 0.999, ϵ \epsilon ϵ 通常取值为 1 0 − 8 10^{-8} 10−8
其中 ϵ \epsilon ϵ 的存在是为了防止 S d W S_{dW} SdW 或 S d b S_{db} Sdb 为零时导致分母为零。
3.3 Adam优化算法(Adaptive Moment Estimation)
Adam算法将动量梯度下降算法与均方根传递算法结合在了一起,是一种极其重用的优化算法,被证明能有效适用于不同的神经网络和广泛的结构。具体步骤如下:
初始化:
V d W V_{dW} VdW、 S d W S_{dW} SdW初始化为与 d W dW dW 形状相同的全零矩阵
V d b V_{db} Vdb、 S d b S_{db} Sdb初始化为与 d b db db形状相同的全零矩阵
在第 t t t 次迭代中:
V d W = β 1 V d W + ( 1 − β 1 ) d W V_{dW}=\beta_1V_{dW}+(1-\beta_1)dW VdW=β1VdW+(1−β1)dW
V d b = β 1 V d b + ( 1 − β 1 ) d b V_{db}=\beta_1V_{db}+(1-\beta_1)db Vdb=β1Vdb+(1−β1)db
S d W = β 2 S d W + ( 1 − β 2 ) ( d W ) 2 S_{dW}=\beta_2S_{dW}+(1-\beta_2)(dW)^2 SdW=β2SdW+(1−β2)(dW)2
S d b = β 2 S d b + ( 1 − β 2 ) ( d b ) 2 S_{db}=\beta_2S_{db}+(1-\beta_2)(db)^2 Sdb=β2Sdb+(1−β2)(db)2
V d W c o r r e c t e d = V d W 1 − ( β 1 ) t V_{dW}^{corrected} =\frac{V_{dW} }{1-(\beta_1)^t} VdWcorrected=1−(β1)tVdW
V d b c o r r e c t e d = V d b 1 − ( β 1 ) t V_{db}^{corrected} =\frac{V_{db} }{1-(\beta_1)^t} Vdbcorrected=1−(β1)tVdb
S d W c o r r e c t e d = S d W 1 − ( β 1 ) t S_{dW}^{corrected} =\frac{S_{dW} }{1-(\beta_1)^t} SdWcorrected=1−(β1)tSdW
S d b c o r r e c t e d = S d b 1 − ( β 1 ) t S_{db}^{corrected} =\frac{S_{db} }{1-(\beta_1)^t} Sdbcorrected=1−(β1)tSdb
W = W − α V d W c o r r e c t e d S d W c o r r e c t e d + ϵ W=W-\alpha\frac{V_{dW}^{corrected}}{\sqrt{S_{dW}^{corrected}+\epsilon}} W=W−αSdWcorrected+ϵVdWcorrected
b = b − α V d b c o r r e c t e d S d b c o r r e c t e d + ϵ b=b-\alpha\frac{V_{db}^{corrected}}{\sqrt{S_{db}^{corrected}+\epsilon}} b=b−αSdbcorrected+ϵVdbcorrected
这里 β 1 \beta_1 β1 通常取值为 0.9, β 2 \beta_2 β2 通常取值为 0.999, ϵ \epsilon ϵ 通常取值为 1 0 − 8 10^{-8} 10−8
4 学习率衰减(Learning rate decay)
当进行小批量梯度下降时,迭代过程中步长(steps)会有些振荡,它会逐步靠近代价最小值点并周围摆动,但不会完全收敛到这一点。因为你的学习率 α 取了固定值,且不同的批次也可能产生些噪声。此时得到的梯度下降曲线如下图蓝线所示。
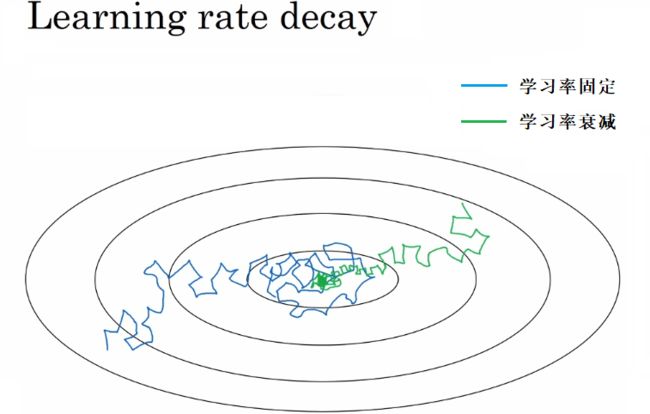
但是我们让学习率 α 逐步衰减,那么在初始阶段,因为学习率α取值还比较大,学习速度仍然可以比较快,但随着学习率降低 α变小,步长也会渐渐变小,所以最终将围绕着离极小值点更近的区域摆动,即使继续训练下去也不会漂游远离。此时得到的梯度下降曲线如上图绿线所示。
那么如何实现在迭代中实现率衰减(learning rate decay)呢?方法有很多:
- α = 1 1 + d e c a y _ r a t e ∗ e p o c h _ n u m α 0 \alpha=\frac{1}{1\ +\ decay\_rate\ *\ epoch\_num}\ \alpha_0 α=1 + decay_rate ∗ epoch_num1 α0
- α = 0.9 5 e p o c h _ n u m α 0 \alpha=0.95^{epoch\_num}\alpha_0 α=0.95epoch_numα0
- α = k e p o c h _ n u m α 0 \alpha=\frac{k}{\sqrt{epoch\_num}}\alpha_0 α=epoch_numkα0 或者 α = k b a t c h _ n u m α 0 \alpha=\frac{k}{\sqrt{batch\_num}}\alpha_0 α=batch_numkα0
- 根据训练情况手动调整
5 局部最优与鞍点、停滞区
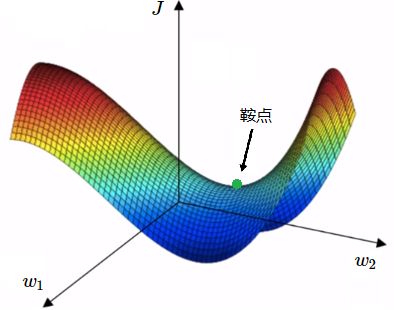
5.1 局部最优(Local Optima)与鞍点(Saddle Point)
对于梯度下降或其他的算法,都很容易陷入局部最优(Local Optima) 而找不到全局最优。

在二维平面中,确实很容易存在很多局部最优。但实际上,如果你是在训练一个神经网络,参数 w 不止一个,代价函数中大部分梯度为零的点实际上并不是局部最优,而是鞍点(Saddle Point) 。在鞍点附近,代价函数 J 对于某些 w 是凸函数,而对另外一些 w 是凹函数。而局部最优或全局最优则要求代价函数 J 在任意一个方向上都是凸函数。
我们在低维空间里的大部分直观感受,实际上并不适用于深度学习算法所应用高维空间。对于一个高维空间的函数,如果某点处梯度为零,则在每个方向上可能是凸函数,或者是凹函数。假设在一个 20000 维的空间中,如果一个点要成为局部最优,则需要在所有的 20000 个方向上都是凸函数。因此这件事发生的概率非常低,大概为 0. 5 20000 0.5^{20000} 0.520000,所以你更有可能遇到的情况是鞍点,而不是局部最优。
也就是说,如果训练的是一个较大的神经网络,有很多参数,代价函数 J 定义在一个相对高维的空间上,实际上不太可能陷入糟糕的局部最优。
5.2 停滞区(Plateaus)
实际上,真正会降低学习速度的实际上是停滞区(Plateaus)。停滞区指的是导数长时间接近于零的一段区域。
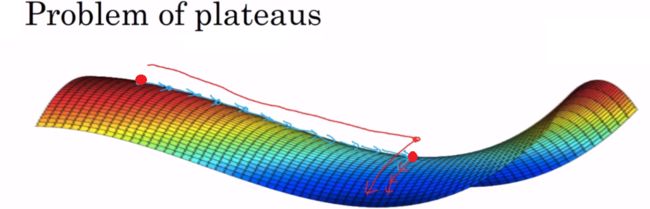
从左上角的红点开始,那么梯度下降会沿着这个曲面向下移动。然而因为梯度为零或接近于零,曲面很平,梯度下降会花费很长的时间,缓慢地找到停滞区里的红点(中间的红点)。然后因为左侧或右侧的随机扰动,才终于能够离开这个停滞区。
也就是说,停滞区会让学习过程变得相当慢,这也是动量(Momentum)算法、RmsProp 算法或 Adam 算法能改善学习算法的地方。