1 四元数
1.1 理论基础
在我们能够完全理解四元数之前,我们必须先知道四元数是怎么来的。四元数的根源其实是复数。
四元数的概念是由爱尔兰数学家Sir William Rowan Hamilton发明的, 公式是:
i2=j2=k2=ijk=−1 i 2 = j 2 = k 2 = i j k = − 1
`一般表达式`:
q=w+xi+yj+zk q = w + x i + y j + z k
`性质`:
|q|2=w2+x2+y2+z2=1 | q | 2 = w 2 + x 2 + y 2 + z 2 = 1
其中:i,j,k都是复数。并且通过公式:
i2=j2=k2=ijk i 2 = j 2 = k 2 = i j k
可以推出:
ij=k i j = k
jk=i j k = i
ki=j k i = j
通过公式:
ijk=−1 i j k = − 1
i−1=−i i − 1 = − i
j−1=−j j − 1 = − j
k−1=−k k − 1 = − k
可以推出:
ji=−k j i = − k
kj=−i k j = − i
ik=−j i k = − j
你可能已经注意到了,`i、j、k`之间的`关系`非常像`笛卡尔坐标系下` `单位向量的叉积`规则:
x⃗ ×y⃗ =z⃗ ⟶ y⃗ ×x⃗ =−z⃗ x → × y → = z → ⟶ y → × x → = − z →
y⃗ ×z⃗ =x⃗ ⟶ z⃗ ×y⃗ =−x⃗ y → × z → = x → ⟶ z → × y → = − x →
z⃗ ×x⃗ =y⃗ ⟶ x⃗ ×z⃗ =−y⃗ z → × x → = y → ⟶ x → × z → = − y →
Hamilton自己也发现i、j、k虚数,可以被用来表达3个笛卡尔坐标系的`单位向量`i、j、k,并且仍然保持有虚数的性质,也即:
i2=j2=k2=−1 i 2 = j 2 = k 2 = − 1 。
1.1.1 三维空间下:
`向量差乘`即`向量积`可以被定义为:
|a⃗ ×b⃗ |=|a⃗ |⋅|b⃗ |⋅sinθ | a → × b → | = | a → | ⋅ | b → | ⋅ sin θ
`叉乘(向量的外积)`是物理里面常常用到的概念, 它是由两个向量得到一个新的向量的运算。一般我们都是从`几何意义`下手: 向量
a⃗ a → 和向量
b⃗ b → 叉乘,得到的是一个`垂直于`
a⃗ a → 和
b⃗ b → 的向量,
c⃗ =a⃗ ×b⃗ c → = a → × b → 它的`方向`由`右手螺旋法则`确定, 它的`长度`是
a⃗ a → 和
b⃗ b → 组成的一个`平行四边形的面积`。 如下图所示: 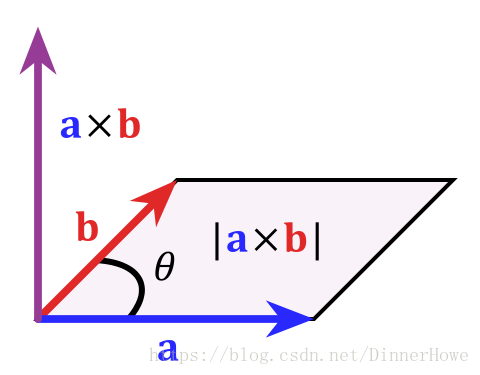 叉乘满足的基本的性质如下: -
a⃗ ×a⃗ =0⃗ a → × a → = 0 → : 因为夹角是0, 所以平行四边形面积也是0, 即叉积长度为0; -
a⃗ ×b⃗ =−(b⃗ ×a⃗ ) a → × b → = − ( b → × a → ) :等式两边的叉积等大反向, 模长因为平行四边形不变而相同, 方向因为右手法则旋转方向相反而相反; -
(λa⃗ )×b⃗ =λ(a⃗ ×b⃗ ) ( λ a → ) × b → = λ ( a → × b → ) :这点比较好想, 因为: 4. 正数
λ λ 数量乘不会影响
a⃗ a → 的方向, 所以左右的叉积方向一样; 负数
λ λ 使得
a⃗ a → 反向了, 但也使得左右叉积方向相反. 5. 对
a⃗ a → 进行缩放, 平行四边形面积也同等缩放. -
(a⃗ +b⃗ )×c⃗ =a⃗ ×c⃗ +b⃗ ×c⃗ ( a → + b → ) × c → = a → × c → + b → × c → :这最难想象的了放弃
1.1.2 四维空间下:
同理将i、j、k虚数用来表达3个笛卡尔坐标系单位向量X、Y、Z如下图所示:
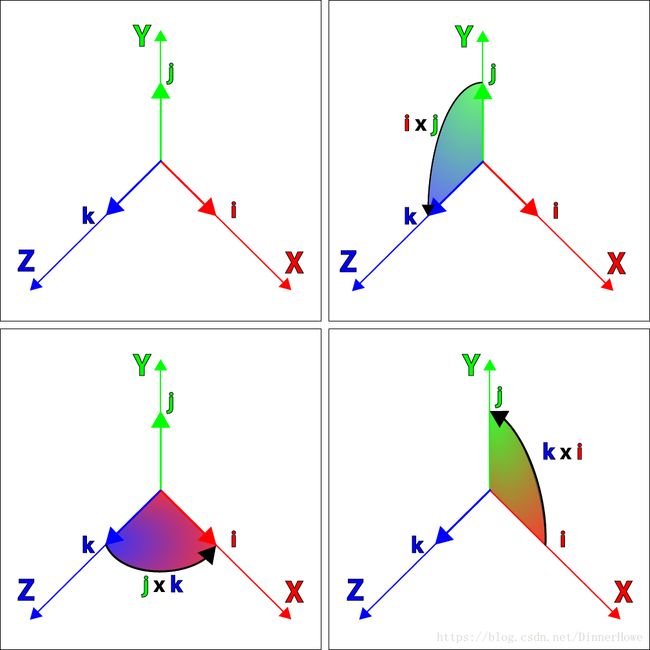
可以得到:
i⃗ ×j⃗ =k⃗ ⟶ j⃗ ×i⃗ =−k⃗ i → × j → = k → ⟶ j → × i → = − k →
j⃗ ×k⃗ =i⃗ ⟶ k⃗ ×j⃗ =−i⃗ j → × k → = i → ⟶ k → × j → = − i →
k⃗ ×i⃗ =j⃗ ⟶ i⃗ ×k⃗ =−j⃗ k → × i → = j → ⟶ i → × k → = − j →
至此,可以将四元素看作空间中任意一个向量了,为了简便,使用有序对的形式表示一个四元素:
q=w+xi+yj+zk ⟶ [w,v⃗ ] q = w + x i + y j + z k ⟶ [ w , v → ]
其中向量
v⃗ v → 有
xi+yj+zk x i + y j + z k ,x ,y,z轴3个方向的分量。
1.1.3 四元数加减:
和复数类似,四元数也可以被加减,假设有两个向量:
qa=[wa,a⃗ ] q a = [ w a , a → ]
qb=[wb,b⃗ ] q b = [ w b , b → ]
于是有
qa+qb=[wa+wb,a⃗ +b⃗ ] q a + q b = [ w a + w b , a → + b → ]
qa−qb=[wa−wb,a⃗ −b⃗ ] q a − q b = [ w a − w b , a → − b → ]
1.1.4 四元数的积:
qaqb=[wa,a⃗ ][wb,b⃗ ] q a q b = [ w a , a → ] [ w b , b → ]
=(wa+xai+yaj+zak)(wb+xbi+ybj+zbk) = ( w a + x a i + y a j + z a k ) ( w b + x b i + y b j + z b k )
=(wawb−xaxb−yayb−zazb) = ( w a w b − x a x b − y a y b − z a z b )
+(waxb+wbxa+yazb+ybza)i + ( w a x b + w b x a + y a z b + y b z a ) i
+(wayb+wbya+zaxb+zbxa)j + ( w a y b + w b y a + z a x b + z b x a ) j
+(wazb+wbza+xayb+xbya)k + ( w a z b + w b z a + x a y b + x b y a ) k
2. 欧拉角
首先介绍roll,pitch,yaw的概念:
2.1 Roll:横滚

2.2 Pitch: 俯仰
2.3 Yaw: 偏航(航向)
在无人车或者机器上主要考虑的是Yaw偏航/航向角,因此这里不全部公式偏向于对yaw角的转换计算。
3. 四元数转欧拉角
假设有一个四元数的向量: Q(x,y,z,w) Q ( x , y , z , w ) ,绕轴 A(ax,ay,az) A ( a x , a y , a z ) 旋转一个固定角度 α α , 将该动作分解为绕x,y,z(即 ax,ay,az a x , a y , a z )轴旋转角度roll,yaw,pitch,有以下公式:
|q|2=w2+x2+y2+z2=1 | q | 2 = w 2 + x 2 + y 2 + z 2 = 1
⎡⎣⎢⎢rollpithyaw⎤⎦⎥⎥=⎡⎣⎢⎢ϕθψ⎤⎦⎥⎥=⎡⎣⎢⎢⎢⎢atan2(2(zy+wx)w2−x2−y2+z2)arcsin(a(wy−xz))atan2(2(xy+wz)w2+x2−y2−z2)⎤⎦⎥⎥⎥⎥=⎡⎣⎢⎢⎢⎢atan2(2(zy+wx)1−2(x2+y2))arcsin(a(wy−xz))atan2(2(xy+wz)1−2(y2+z2))⎤⎦⎥⎥⎥⎥ [ r o l l p i t h y a w ] = [ ϕ θ ψ ] = [ a t a n 2 ( 2 ( z y + w x ) w 2 − x 2 − y 2 + z 2 ) arcsin ( a ( w y − x z ) ) a t a n 2 ( 2 ( x y + w z ) w 2 + x 2 − y 2 − z 2 ) ] = [ a t a n 2 ( 2 ( z y + w x ) 1 − 2 ( x 2 + y 2 ) ) arcsin ( a ( w y − x z ) ) a t a n 2 ( 2 ( x y + w z ) 1 − 2 ( y 2 + z 2 ) ) ]
由于:
1−2(x2+y2)=w2−x2−y2+z2 1 − 2 ( x 2 + y 2 ) = w 2 − x 2 − y 2 + z 2
1−2(y2+z2)=w2+x2−y2−z2 1 − 2 ( y 2 + z 2 ) = w 2 + x 2 − y 2 − z 2
PS:这里不用 arctan arctan 是因为: arctan arctan 和 arcsin arcsin 的结果是 [−π2π2] [ − π 2 π 2 ] , 这并不能覆盖所有朝向(仅仅对于 pith角 θ θ , [−π2π2] [ − π 2 π 2 ] 的取值范围满足,但是我们主要考虑的是yaw角),因此需要用atan2 来代替 arctan arctan 。
4. 欧拉角转四元数
4.1 转化公式
用 Q(x,y,z,w) Q ( x , y , z , w ) 表示一个四元数的向量,绕轴 A(ax,ay,az) A ( a x , a y , a z ) 旋转角度 α α 有以下公式:
完整公式:
q=⎡⎣⎢⎢⎢⎢wxyz⎤⎦⎥⎥⎥⎥=⎡⎣⎢⎢⎢⎢cos(ϕ/2)cos(θ/2)cos(ψ/2)+sin(ϕ/2)sin(θ/2)sin(ψ/2)sin(ϕ/2)cos(θ/2)cos(ψ/2)−cos(ϕ/2)sin(θ/2)sin(ψ/2)cos(ϕ/2)sin(θ/2)cos(ψ/2)+sin(ϕ/2)cos(θ/2)sin(ψ/2)cos(ϕ/2)cos(θ/2)sin(ψ/2)−sin(ϕ/2)sin(θ/2)cos(ψ/2)⎤⎦⎥⎥⎥⎥ q = [ w x y z ] = [ cos ( ϕ / 2 ) cos ( θ / 2 ) cos ( ψ / 2 ) + sin ( ϕ / 2 ) sin ( θ / 2 ) sin ( ψ / 2 ) sin ( ϕ / 2 ) cos ( θ / 2 ) cos ( ψ / 2 ) − cos ( ϕ / 2 ) sin ( θ / 2 ) sin ( ψ / 2 ) cos ( ϕ / 2 ) sin ( θ / 2 ) cos ( ψ / 2 ) + sin ( ϕ / 2 ) cos ( θ / 2 ) sin ( ψ / 2 ) cos ( ϕ / 2 ) cos ( θ / 2 ) sin ( ψ / 2 ) − sin ( ϕ / 2 ) sin ( θ / 2 ) cos ( ψ / 2 ) ]
如若只绕`z轴旋转`简化公式:
w=cos(α/2) w = cos ( α / 2 )
x=sin(α/2)∗cos(βx) x = sin ( α / 2 ) ∗ cos ( β x )
y=sin(α/2)∗cos(βy) y = sin ( α / 2 ) ∗ cos ( β y )
z=sin(α/2)∗cos(βz) z = sin ( α / 2 ) ∗ cos ( β z )
其中
α α 是绕旋转轴旋转的角度,
cos(βx) cos ( β x ) ,
cos(βy) cos ( β y ) ,
cos(βz) cos ( β z ) 分别为旋转轴在x,y,z方向的分量(由此确定了旋转轴),这里绕z轴旋转,因此
cos(βx)=0 cos ( β x ) = 0 并且
cos(βy)=0 cos ( β y ) = 0 ,
cos(βz)=1 cos ( β z ) = 1 。
5. 代码实例
void eulerAnglesToQuaternion(void)
{
cosRoll = cosf(roll * 0.5f);
sinRoll = sinf(roll * 0.5f);
cosPitch = cosf(pitch * 0.5f);
sinPitch = sinf(pitch * 0.5f);
cosHeading = cosf(hdg * 0.5f);
sinHeading = sinf(hdg * 0.5f);
q0 = cosRoll * cosPitch * cosHeading + sinRoll * sinPitch * sinHeading;
q1 = sinRoll * cosPitch * cosHeading - cosRoll * sinPitch * sinHeading;
q2 = cosRoll * sinPitch * cosHeading + sinRoll * cosPitch * sinHeading;
q3 = cosRoll * cosPitch * sinHeading - sinRoll * sinPitch * cosHeading;
}
void quaternionToRotationMatrix(void)
{
float q1q1 = sq(q1);
float q2q2 = sq(q2);
float q3q3 = sq(q3);
float q0q1 = q0 * q1;
float q0q2 = q0 * q2;
float q0q3 = q0 * q3;
float q1q2 = q1 * q2;
float q1q3 = q1 * q3;
float q2q3 = q2 * q3;
rMat[0][0] = 1.0f - 2.0f * q2q2 - 2.0f * q3q3;
rMat[0][1] = 2.0f * (q1q2 + -q0q3);
rMat[0][2] = 2.0f * (q1q3 - -q0q2);
rMat[1][0] = 2.0f * (q1q2 - -q0q3);
rMat[1][1] = 1.0f - 2.0f * q1q1 - 2.0f * q3q3;
rMat[1][2] = 2.0f * (q2q3 + -q0q1);
rMat[2][0] = 2.0f * (q1q3 + -q0q2);
rMat[2][1] = 2.0f * (q2q3 - -q0q1);
rMat[2][2] = 1.0f - 2.0f * q1q1 - 2.0f * q2q2;
}
void quaternionToEulerAngles(void)
{
roll = atan2f(2.f * (q2q3 + q0q1), q0q0 - q1q1 - q2q2 + q3q3);
pitch = asinf(2.f * (q0q2 - q1q3));
yaw = atan2f(2.f * (q1q2 + q0q3), q0q0 + q1q1 - q2q2 - q3q3);
}
参考:
https://en.wikipedia.org/wiki/Cross_product
https://www.3dgep.com/understanding-quaternions/
https://www.cnblogs.com/zzdyyy/p/7643267.html
https://blog.csdn.net/hziee_/article/details/1630116