使用Realsense D435相机在ROS Kinetic中跑通ORB-SLAM2
文章中不足,错误的地方欢迎大家批评指正,如果哪步遇到了问题,我尽力为你解答[皱眉]。这个文章主要是想记录当时配环境的步骤,以防以后再配忘了某步。
目录
- 使用配置
- 主要步骤
- 安装基于ROS使用RealSense的包
- Step1 安装RealSense SDK
- Step2 安装ROS Kinetic
- Step3 安装基于ROS使用RealSense的包
- 配置ORB-SLAM2
- 步骤
- 单目测试
- RGB-D相机测试
- 获取相机信息,实现数据传输
- 获得相机内参矩阵
- 测试
使用配置
- 系统:Ubuntu16.04,ROS Kinetic
- 相机:Intel RealSense D435
- SLAM:ORB-SLAM
主要步骤
- 安装基于ROS使用RealSense的包(包含安装RealSense SDK和ROS Kinetic)
- 配置ORB-SLAM2
- 获取相机信息,实现数据传输
安装基于ROS使用RealSense的包
Step1 安装RealSense SDK
在librealsense/doc/这里面有两个文档,一个是distribution_linux.md,另一个是installation.md
我是根据distribution_linux.md装的,
如下:
Register the server’s public key :
sudo apt-key adv --keyserver keys.gnupg.net --recv-key C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key C8B3A55A6F3EFCDE
Add the server to the list of repositories :
Ubuntu 16 LTS:
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo xenial main" -u
When upgrading, remove the old records:
sudo rm -f /etc/apt/sources.list.d/realsense-public.list.
sudo apt-get update.
In order to run demos install:
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
The above two lines will deploy librealsense2 udev rules, build and activate kernel modules, runtime library and executable demos and tools.
Reconnect the Intel RealSense depth camera and run: realsense-viewer to verify the installation.
Developers shall install additional packages:
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
With dev package installed, you can compile an application with librealsense using g++ -std=c++11 filename.cpp -lrealsense2 or an IDE of your choice.
Verify that the kernel is updated :
modinfo uvcvideo | grep "version:"should include realsense string
Step2 安装ROS Kinetic
官方教程
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116sudo apt-get update- Desktop-Full Install: (Recommended) : ROS, rqt, rviz, robot-generic libraries, 2D/3D simulators, navigation and 2D/3D perception (因为比较全,所以装的是完全版)
sudo apt-get install ros-kinetic-desktop-full # apt-cache search ros-kineticsudo rosdep init
rosdep updateecho "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrcsudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
检查ROS是否成功安装的小乌龟的例子:
大概三个终端
roscorerosrun turtlesim turtlesim_noderosrun turtlesim turtle_teleop_key
鼠标点击此窗口,保证第三个终端窗口在最前,然后再按上下左右,看小乌龟是否运动,能动说明成功安装了。 鼠标点击此窗口,保证第三个终端窗口在最前,然后再按上下左右,看小乌龟是否运动,能动说明成功安装了。
Step3 安装基于ROS使用RealSense的包
官方教程
- Create a catkin workspace
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src/ - Clone the latest Intel® RealSense™ ROS from here into ‘catkin_ws/src/’
把realsense这个文件下载/克隆到该目录下
catkin_init_workspace
cd ..
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
检验是否能在ros使用realsense相机:
- install rgbd_launch
sudo apt-get install ros-kinetic-rgbd-launch roslaunch realsense2_camera rs_rgbd.launch- 再打开一个终端,输入
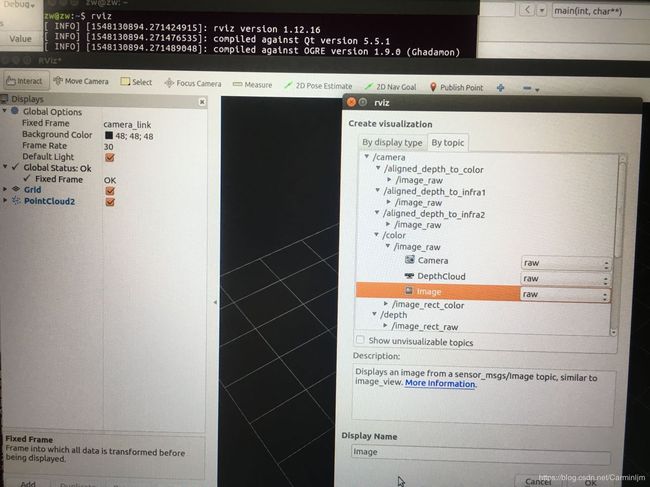
rviz
此时并不能看到什么结果 - 左上角 Displays 中 Fixed Frame 选项中,下拉菜单选择 camera_link
- 这是主要到Global Status变成了绿色
- 点击该框中的Add -> 上方点击 By topic -> /depth_registered 下的 /points 下的/PointCloud2
- 点击该框中的Add -> 上方点击 By topic -> /color 下的 /image_raw 下的image
见下图:

成功则有如下图片

这块就完了。
配置ORB-SLAM2
步骤
对我帮助很大的一篇教程:ORB-SLAM2编译安装和USB摄像头例程运行
作者:WafeiShushu
此时我们已经有了一个工作空间
我首先把ORB_SLAM2的程序拷到了/catkin_ws中
-
安装git cmake 和一些库
sudo apt-get install git cmake
sudo apt-get install libblas-dev liblapack-dev -
关于Pangolin
sudo apt-get install libglew-dev
sudo apt-get install libboost-dev libboost-thread-dev libboost-filesystem-dev
sudo apt-get install libpython2.7-dev
sudo apt-get install build-essential
*我把Pangolin git到了ORB_SLAM2那个程序的文件夹中,我感觉这步应该不是这样的,不过问题不大
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin -
编译安装Pangolin
mkdir build
cd build
cmake -DCPP11_NO_BOOST=1 ..
make -
安装OpenCV依赖
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev -
OpenCV
OpenCV的版本:Required at leat 2.4.3. Tested with OpenCV 2.4.11 and OpenCV 3.2.
我装的是3.2.0 -
下载完后解压,进入OpenCV文件夹进行编译安装(opencv下哪问题好像都不大)
mkdir release
cd release
cmake -D CMAKE_BUILD_TYPE=RELEASE -D
CMAKE_INSTALL_PREFIX=/usr/local ..
make
sudo make install -
Eigen3
我发现这一趟安装下来,用pkg-config --modversion eigen3查看eigen3的版本已经有3.2.92,就没继续装eigen3了
版本要求:Required at least 3.1.0.
据说:下载3.2.10版本,如果用3.3.x版本可能会造成ORB-SLAM2编译失败,因为eigen3.3.4版本修改了文件目录结构。 -
ORB_SLAM2
下载或克隆到/catkin_ws文件中。
cd ORB_SLAM2
chmod +x build.sh
gedit build.sh此步骤可以将build.sh的make -j改成make 防止多线程编译错误,之后我自己没有更改,发现没有问题。
./build.sh
此时,返回到~目录下
gedit .bashrc
写入export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/(user)/catkin_ws/ORB_SLAM2/Examples/ROS
接着去编译build_ros.sh
chmod +x build.sh
- 可以同上步一样,将build_ros.sh的make -j改成make (不过我没做)
gedit build_ros.sh - 在/Examples/ROS/ORB-SLAM2/CMakeLists.txt文件下修改 加上 -lboost_system(我没加这个的时候会有关于stl的错误)
set(LIBS
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PROJECT_SOURCE_DIR}/../../../Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/../../../Thirdparty/g2o/lib/libg2o.so
${PROJECT_SOURCE_DIR}/../../../lib/libORB_SLAM2.so
-lboost_system #此处
)
单目测试
下载测试集TUM Dataset
cd 到ORB_SLAM2文件夹下
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUMX.yaml(可以为TUM1/TUM2/TUM3) PATH_TO_SEQUENCE_FOLDER(你数据集所在的位置)
例子:
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml rgbd_dataset_freiburg1_desk
RGB-D相机测试
以rgbd_dataset_freiburg2_pioneer_360数据集为例
- 下载 associate.py.放在/ORB_SLAM2/Examples/RGB-D/目录下面.
- 打开终端,进入到associate.py所在目录,即/ORB_SLAM2/Examples/RGB-D/,之后运行
python associate.py ../../rgbd_dataset_freiburg2_pioneer_360/rgb.txt ../../rgbd_dataset_freiburg2_pioneer_360/depth.txt > associations.txt
在该目录中将会生成一个associations.txt文件. - 在ORB_SLAM2 主目录下运行
./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM2.yaml rgbd_dataset_freiburg2_pioneer_360 Examples/RGB-D/associations.txt
获取相机信息,实现数据传输
参考教程
获得相机内参矩阵
they’re published on a topic in the realsense ROS node. We can get those parameters by running rostopic echo /camera/color/camera_info
打开三个终端
roscoreroslaunch realsense2_camera rs_rgbd.launch(在catkin_ws目录下,这步基于我们的第一个操作)rostopic echo /camera/color/camera_info
运行之后的结构长这样
---
header:
seq: 108
stamp:
secs: 1548140470
nsecs: 392033543
frame_id: "camera_color_optical_frame"
height: 480
width: 640
distortion_model: "plumb_bob"
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [614.4114379882812, 0.0, 324.2138671875, 0.0, 614.7125244140625, 236.86329650878906, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [614.4114379882812, 0.0, 324.2138671875, 0.0, 0.0, 614.7125244140625, 236.86329650878906, 0.0, 0.0, 0.0, 1.0, 0.0]
binning_x: 0
binning_y: 0
roi:
x_offset: 0
y_offset: 0
height: 0
width: 0
do_rectify: False
---
K就是我们得到的内参矩阵写成了向量模式。
K = [fx 0 cx 0 fy cy 0 0 1 ]
然后就是baseline,根据官方datasheet,
D435 的baseline为55mm,bf的值为bf = baseline (in meters) * fx。
给出根据相机参数得到的新的yaml文件
%YAML:1.0
#--------------------------------------------------------------------------------------------
# Camera Parameters. Adjust them!
#--------------------------------------------------------------------------------------------
# Camera calibration and distortion parameters (OpenCV)
Camera.fx: 614.4114379882812
Camera.fy: 614.7125244140625
Camera.cx: 324.2138671875
Camera.cy: 236.86329650878906
Camera.k1: 0.0
Camera.k2: 0.0
Camera.p1: 0.0
Camera.p2: 0.0
Camera.width: 640
Camera.height: 480
# Camera frames per second
Camera.fps: 30.0
# IR projector baseline times fx (aprox.)
Camera.bf: 30.720571899
# Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale)
Camera.RGB: 1
# Close/Far threshold. Baseline times.
ThDepth: 50.0
# Deptmap values factor
DepthMapFactor: 1000.0
#--------------------------------------------------------------------------------------------
# ORB Parameters
#--------------------------------------------------------------------------------------------
# ORB Extractor: Number of features per image
ORBextractor.nFeatures: 1000
# ORB Extractor: Scale factor between levels in the scale pyramid
ORBextractor.scaleFactor: 1.2
# ORB Extractor: Number of levels in the scale pyramid
ORBextractor.nLevels: 8
# ORB Extractor: Fast threshold
# Image is divided in a grid. At each cell FAST are extracted imposing a minimum response.
# Firstly we impose iniThFAST. If no corners are detected we impose a lower value minThFAST
# You can lower these values if your images have low contrast
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7
#--------------------------------------------------------------------------------------------
# Viewer Parameters
#--------------------------------------------------------------------------------------------
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1
Viewer.GraphLineWidth: 0.9
Viewer.PointSize:2
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3
Viewer.ViewpointX: 0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -1.8
Viewer.ViewpointF: 500
realsense发布(publish)的camera data 在/camera/color/image_raw 和 depth data 在 /camera/depth/image_rect_raw ,所以我们要更改 ~/ORB_SLAM2/Examples/ROS/ORB_SLAM2/src/ros_rgbd.cc下接收的位置
之后要再运行./build_ros.sh
*我记得我在重复很多遍的时候,提前就改好文件,然后运行的./build_ros.sh
测试
然后差不多所有配置都搞定了
最后,打开三个终端
roscorerosrun ORB_SLAM2 RGBD /home/(user name)/catkin_ws/ORB_SLAM2/Vocabulary/ORBvoc.txt /home/(user name)/catkin_ws/ORB_SLAM2/Examples/ROS/ORB_SLAM2/AsusD435.yamlroslaunch realsense2_camera rs_rgbd.launch
即可看到结果