SLAM笔记(八)-再谈四元数
在二维空间中,我们用复数表示某点坐标,此时可以用加法表达点的移动,用乘法(乘以一个复数)表示点绕原点的旋转。
在三维空间中,我们无法无法用三维的“超级复合数”来表示点的移动和旋转。这也是四元数发明者汉姆尔顿(爱尔兰数学家)曾苦恼的地方。后来他想:为什么要坚持3位数表达,不用四位数来表达三维空间的移动和旋转呢?经过一系列证明,现在我们已经知道可以用四元数来表示三维空间的旋转,同理还存在八元数、十六元数等;但越往上就越会失去一些特性,比如四元数失去了交换律。
1.四元数简介
四元数分为向量和旋转角度 θ \theta θ。如果用三个数来表达,则不可避免会出现奇异情况(如欧拉角);而旋转矩阵有9个分量,浪费空间;四元数刚好无奇异表达,又节约空间。
四元数分为实部和虚部:
q = [ q 0 + q 1 i + q 2 j + q 3 k ] q = [q_0+q_1i+q_2j+q_3k] q=[q0+q1i+q2j+q3k] (2)
常写作: [ q 0 , q 1 , q 2 , q 3 ] [q_0,q_1,q_2,q_3] [q0,q1,q2,q3]
有时也将四元数用一个标量 q 0 q_0 q0,一个向量 [ q 1 , q 2 , q 3 ] [q_1,q_2,q_3] [q1,q2,q3] 来表示。
注: 高翔的博客中用实部在前、虚部在后的写法,而很多文章中采用虚部在前,实部在后的方式。但它们都对应于唯一的表达式(2),也就是这对四元数运算,如旋转公式 q p q − 1 qpq^{-1} qpq−1无影响。
假设绕空间中某一向量 n = [ n x , n y , n z ] T n = [n_x,n_y,n_z]^T n=[nx,ny,nz]T 旋转 θ \theta θ,则四元数 q = [ q 0 , q 1 , q 2 , q 3 ] q = [q_0,q_1,q_2,q_3] q=[q0,q1,q2,q3]式子为:
q = [ c o s θ 2 , n x s i n θ 2 , n y s i n θ 2 , n z s i n θ 2 ] ( 1 ) q = [cos\frac{\theta}{2}, n_xsin\frac{\theta}{2}, n_ysin\frac{\theta}{2}, n_zsin \frac{\theta}{2}] (1) q=[cos2θ,nxsin2θ,nysin2θ,nzsin2θ](1)
由上,我们也可以反过来通过任一四元数 q = [ q 0 , q 1 , q 2 , q 3 ] q = [q_0,q_1,q_2,q_3] q=[q0,q1,q2,q3]来计算:夹角 θ \theta θ和向量n。
从这儿也可以看出四元数与旋转向量的联系和区别:
旋转向量由三个量表示,
注:
(1)处为单位四元数,模为1,四元数 θ \theta θ加上 2 π 2\pi 2π 则正负相反,因此任一选择可以由q或它的共轭-q表示;如 θ = 0 \theta = 0 θ=0,q = [1,0,0,0]或[-1,0,0,0]。
四元数可以不为单位四元数,非单位四元数与单位四元数的区别在于 n x , n y , n z n_x,n_y,n_z nx,ny,nz 进行一定等比例缩放。
2.四元数运算(可先看3再回头看2)
i 加减法 对应元素相加减
ii 乘法 q a , q b q_a,q_b qa,qb的乘法即 q a q_a qa**每一个元素(带虚部)**与 q b q_b qb每一个元素分别进行复数域的相乘(也就是有16次两两相乘):
注意:
ii = jj = k*k = -1;
ij = k, ji = -k;
jk = i, kj = -i;
ki = j, ik = -j;
iii 求模
∣ ∣ q ∣ ∣ = s q r t ( q 0 2 + q 1 2 + q 2 2 + q 3 2 ) ||q|| = sqrt(q_0^2+q_1^2+q_2^2+q_3^2) ∣∣q∣∣=sqrt(q02+q12+q22+q32)
iv 共轭(可以视为表示同一个三维空间上的旋转)
q ∗ = ( q 0 , − q 1 , − q 2 , − q 3 ) q^* = (q_0,-q_1,-q_2,-q_3) q∗=(q0,−q1,−q2,−q3)
v. 求逆
q − 1 = q ∗ ∣ ∣ q ∣ ∣ 2 q^{-1} = \frac{q^*}{||q||^2} q−1=∣∣q∣∣2q∗
通常用单位四元数来表示旋转,这样才能逆即为共轭:
q − 1 = q ∗ = ( q 0 , − q 1 , − q 2 , − q 3 ) q^{-1} = q*=(q_0,-q_1,-q_2,-q_3) q−1=q∗=(q0,−q1,−q2,−q3)
四元数的逆物理意义表示什么?
vi 点乘
即不考虑虚部i,j,k,只是对应元素相乘:
q a ⋅ q b = q a 0 q b 0 + q a 1 q b 1 + q a 2 q b 2 + q a 3 q b 3 q_a \cdot q_b = q_{a0}q_{b0}+q_{a1}q_{b1}+q_{a2}q_{b2}+q_{a3}q_{b3} qa⋅qb=qa0qb0+qa1qb1+qa2qb2+qa3qb3
注意:四元数不满足交换律,即 p q ≠ q p pq \neq qp pq̸=qp
vii. 求导
在时间t处的角速度为 ω \omega ω,则四元数q(t)导数为:
q ˙ ( t ) = 1 2 q ∗ [ 0 , 1 ω ] \dot q(t) = \frac{1}{2}q*[0, \frac{1}{\omega}] q˙(t)=21q∗[0,ω1]
3.为什么要有四元数
我们知道用欧拉角或者方向角(roll, pitch,yaw)可以表示旋转,比如,
记录旋转轴顺序,
加上角度就是一个完整的欧拉角表示方式: z x y − > θ ρ ϕ zxy->\theta \rho \phi zxy−>θρϕ

这在直观上也很好理解,为什么还要多此一举引入四元数?
大家可能会想到因为欧拉角表示导致的万向锁。
万向锁只是方向角在实际物理实现上会出现的一个问题,理论上
要规避万向节死锁,选择合适的旋转顺序就行了。
但问题是:决定顺序也要花费判定成本。
用方向角表示旋转,虽然直观,但没有考虑到歧义,以及计算和存储的需求。
所谓歧义,即我们一般是先知道欧拉角再去计算唯一的旋转(旋转向量、旋转矩阵、四元数等能唯一表示三维旋转的方式),但给定一个三维旋转,我们却有至少两种欧拉角表示方式。
消除歧义:
欧拉角的选取顺序有(x,y x,x,z,x)等
6种,可见选取顺序是a,b,a这样的顺序,也就是绕a轴旋转某角度后,绕新生成的b轴旋转一个角度,最后绕两次旋转以后的a轴再旋转一个角度
为了消除歧义,我们让旋转一次到位,即绕某一旋转轴旋n转 θ \theta θ,这即是旋转向量: n θ n\theta nθ。
但如果要将旋转构建成一个群,则三维是满足不了群的幺元、封闭性、結合律、有逆元的性质的,所以我们尝试用四维空间来表示三维旋转,即四元数。
本质上,四元数表示的三维旋转是四维空间的一个子集:当以(0,x,y,z)形式表达三维点时,即可参数化四元数。
优化:存储和计算
用欧拉角来计算旋转,如果用常规的李群表示,大致如下:

由以上可以看出:存储上和存储上,至少需要存储六组数据(三个角的cos,sin值)。
而四元数的旋转直接相互运算,包括插值(球面插值),都是非常快的,详如下节。
4.物理上的四元数运算
i.三维点p经过某旋转(以四元数表达)后的三维点位置
三维空间的点可以用虚四元数表示:p = [0,x,y,z];
将点p绕着向量n(四元数旋转轴)旋转角度 θ \theta θ的,旋转后的点/向量为:
p ′ = q p q − 1 p' = qpq^{-1} p′=qpq−1
可以证明得到的p’的维度中第一位是0.
现场落地测试下:对点p = [1,1,0]绕z轴进行90度顺时针旋转( q = [ c o s θ 2 , n x s i n θ 2 , n y s i n θ 2 , n z s i n θ 2 ] = [ 2 / 2 , 0 , 0 , 2 / 2 ] q = [cos\frac{\theta}{2}, n_xsin\frac{\theta}{2}, n_ysin\frac{\theta}{2}, n_zsin \frac{\theta}{2}] = [\sqrt 2/2, 0, 0, \sqrt2/2] q=[cos2θ,nxsin2θ,nysin2θ,nzsin2θ]=[2/2,0,0,2/2])
转换后的四元数结果为?
答案为:[0, -i, j, 0].
可以认为四元数表征的是四维空间。如果要描述旋转,则必须是单位四元数,或者说单位四元数所代表的球面能正好描述三维旋转。
如果只是左乘一个单位四元数,右边什么都不乘,那么我们得到的是四维旋转的一个子集,这个子集并不能保证结果限制在三维超平面上。如果只右乘,不左乘也是一样一样的。
将某三维点绕四元数p旋转,直接用两次四元数乘积,消耗比较大, p ′ = q p q − 1 p' = qpq^{-1} p′=qpq−1的实现一般采用更快的方法:
void rotate_vector_by_quaternion(const Vector3& v, const Quaternion& q, Vector3& vprime)
{
// Extract the vector part of the quaternion
Vector3 u(q.x, q.y, q.z);
// Extract the scalar part of the quaternion
float s = q.w;
// Do the math
vprime = 2.0f * dot(u, v) * u
+ (s*s - dot(u, u)) * v
+ 2.0f * s * cross(u, v);
}
ii.四元数之间的旋转
a.四元数表征旋转,当我们需要比较两个旋转谁的旋转幅度大时,比较 θ \theta θ即可,或在归一化成单位四元数后,比较第 q 0 q_0 q0的大小即可。
b.先经过p1旋转,再经过p2旋转,则总共旋转(类似球面最短路径):
p t o t a l = p 1 p 2 p_{total} = p_1p_2 ptotal=p1p2
注意此处是四元数的乘法,而非四元素的点积。任意两个四元数总是可以组合成一个新的旋转。
比如先绕着x轴旋转60度,再绕着(1,1,1)旋转30度,可以合二为一,用绕着某轴旋转某度来表示。
c. 计算从旋转状态p1到达旋转状态p2的变换 p t r a n s p_{trans} ptrans(也是一个四元数):
p t r a n s = p 1 − 1 ∗ p 2 p_{trans}= p_1^{-1}*p_2 ptrans=p1−1∗p2
四元数的逆表示一个反向的旋转,任意两个四元数总是可以组合成一个新的旋转(四元数的表达中不存在万向锁)。
为了计算从旋转状态p1到达旋转状态p2所需的最小角度 θ \theta θ,只需计算 p 1 − 1 ∗ p 2 p1^{-1}*p2 p1−1∗p2的实部,实部等于 c o s ( θ / 2 ) cos(\theta /2) cos(θ/2)。因此在Unity中计算两个四元数lhs与rhs之间的旋转最小角度可为:
float Quaternion::Angle(const Quaternion &lhs, const Quaternion &rhs)
{
float cos_theta = Dot(lhs, rhs);
// if B is on opposite hemisphere from A, use -B instead
if (cos_theta < 0.f)
{
cos_theta = -cos_theta;
}
float theta = acos(cos_theta);
return 2 * Mathf::Rad2Deg * theta;
}
**d.**两个四元数的余弦角度,无具体物理含义,既不能表征谁的旋转幅度大,也不能表征各自旋转轴的关系,但在球面插值时会有用(参见部分4)。
3.四元数、旋转矩阵、旋转向量、欧拉角的相互转换
3.1.四元数与旋转向量
旋转向量的表示: θ [ n x , n y , n z \theta [n_x,n_y,n_z θ[nx,ny,nz,其中n为单位矩阵:
在上文已经知道旋转向量到四元数 [ q 0 , q 1 , q 2 , q 3 ] [q_0,q_1,q_2,q_3] [q0,q1,q2,q3]的转换法,则:
θ = 2 ⋅ a c o s ( q 0 ) \theta = 2\cdot acos(q_0) θ=2⋅acos(q0)
[ n x , n y , n z ] = [ q 1 , q 2 , q 3 ] / s i n ( θ 2 ) [n_x,n_y,n_z] = [q_1,q_2,q_3]/sin(\frac{\theta}{2}) [nx,ny,nz]=[q1,q2,q3]/sin(2θ)
3.2.四元数与旋转矩阵
有了四元数,我们可以算出n与 θ \theta θ,然后根据罗格斯变换再算出选择矩阵R,也可以直接算R(此处为单位四元数):
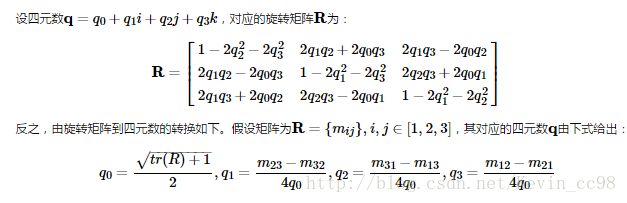
如果四元数非单位四元数,则:

由于q和−q表示同一个旋转,对同一个旋转矩阵R,对应4种q。存在其他三种与上式类似的计算方式。实际编程中,当q0接近0时,其余三个分量会非常大,导致解不稳定,此时会考虑使用剩下的三种种方式之一计算。具体推导可参见该链接
3.3 从四元数到欧拉角
相互转实现可参考:
用C++实现一个Quaternion类
4.四元数插值
在两个四元数的插值操作称为slerp,即球面线性插值(Spherical Linear Interpolation)。slerp运算非常有用,可以避免欧拉角插值的所有问题(如万向锁)。
设开始与结束的四元数为q0,q1,插值变量设为t,t在[0, 1]之间变化 。则slerp函数定义为: s l e r p ( q 0 , q 1 , t ) = q 0 ( q 0 − 1 q 1 ) t slerp(q0,q1,t) = q0(q0^{-1}q1)^t slerp(q0,q1,t)=q0(q0−1q1)t。其代码实现为:
Quaternion Quaternion::Slerp(const Quaternion &a, const Quaternion &b, float t)
{
float cos_theta = Dot(a, b);
// if B is on opposite hemisphere from A, use -B instead
float sign;
if (cos_theta < 0.f){
cos_theta = -cos_theta;
sign = -1.f;
}
else sign = 1.f;
float c1, c2;
if (cos_theta > 1.f - Mathf::EPSILON) { // if q2 is (within precision limits) the same as q1,
// just linear interpolate between A and B.
c2 = t;
c1 = 1.f - t;
}
else
{
// faster than table-based :
//const float theta = myacos(cos_theta);
float theta = acos(cos_theta);
float sin_theta = sin(theta);
float t_theta = t*theta;
float inv_sin_theta = 1.f / sin_theta;
c2 = sin(t_theta) * inv_sin_theta;
c1 = sin(theta - t_theta) * inv_sin_theta;
}
c2 *= sign; // or c1 *= sign
// just affects the overrall sign of the output
// interpolate
return Quaternion(a.x * c1 + b.x * c2, a.y * c1 + b.y * c2, a.z * c1 + b.z * c2, a.w * c1 + b.w * c2);
}
参考小结:
【Numberphile数字狂】神奇四元数 @柚子
Understanding Quaternions 中文翻译《理解四元数》
知乎:如何形象地理解四元数?
用C++实现一个Quaternion类