ROS Navigation的base_local_planner类继承关系与实现方法
base_local_planner
局部规划根据传感器的数据为机器人选择适当的线速度、角速度,来完成全局路径当前局部片段的执行。局部规划从全局和局部costmap中选择一条路径执行,因此局部回话可以重新计算机器人的路径,以防止撞击物体,但仍然需要它到达目的地。为了有效地评分轨迹,使用了栅格地图。对于每个控制周期,在机器人周围创建一个局部网格(局部地图的大小),并将全局路径映射到该区域。这意味着某些栅格单元(全局路径经过的栅格)将被标记为距离0。然后有效地将所有其他单元的距离标记为到最近的被标记为0的栅格的曼哈顿距离。
目标函数与类继承关系
关于局部规划路径的选择,首先是代价函数的计算与相关的算法类:
cost =
pdist_scale * (distance to path from the endpoint of the trajectory in map cells or meters depending on the meter_scoring parameter)
+ gdist_scale * (distance to local goal from the endpoint of the trajectory in map cells or meters depending on the meter_scoring parameter)
+ occdist_scale * (maximum obstacle cost along the trajectory in obstacle cost (0-254))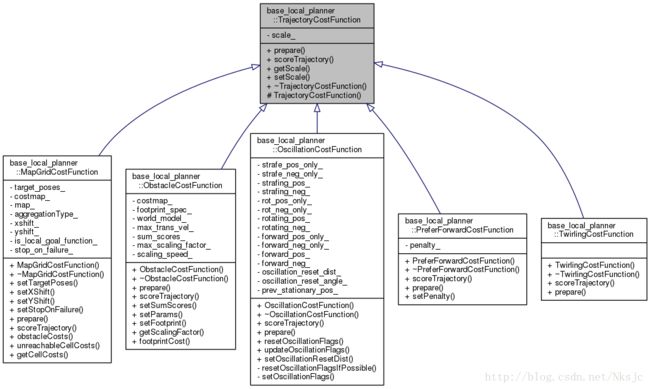
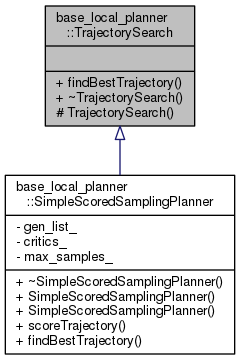
在TrajectoryCostFunction定义了接口scoreTrajectory()用来评估每一条轨迹的代价。TrajectorySampleGenerator产生一系列轨迹,然后TrajectoryCostFunction遍历轨迹打分,TrajectorySearch找到最好的轨迹拿来给小车导航;由于小车不是一个质点,worldModel会检查小车有没有碰到障碍物。
同前面所讲,在机器人周围创建一个局部网格(局部地图的大小),并将全局路径映射到该区域。这意味着某些栅格单元(全局路径经过的栅格)将被标记为距离0。然后有效地将所有其他单元的距离标记为到最近的被标记为0的栅格的曼哈顿距离。MapGridCostFunction就是局部规划的路径离全局规划的路径的距离,也能够来评估到目标的距离,它维护了一个base_local_planner::MapGrid map_,MapGrid是一系列MapCell,而MapCell包含了一个target_dist,也就是说,MapGridCostFunction建立后随时知道地图上一个点到全局规划轨迹的距离,或者是到目标的距离。具体是在computeTargetDistance中实现的。
ObstacleCostFunction就是计算机器人在局部的costmap上路径的代价,检测是否撞到障碍。其中ObstacleCostFunction用到了worldModel(如下图)接口来检测底座是不是撞到障碍物,从初始化函数可以看出来,ObstacleCostFunction选用了CostmapModel作为具体实现,想改为其他具体实现随时可以改这一行。
OscillationCostFunction:Oscillation occur when in either of the x, y, or theta dimensions, positive and negative values are chosen consecutively. To prevent oscillations, when the robot moves in any direction, for the next cycles the opposite direction is marked invalid, until the robot has moved beyond a certain distance from the position where the flag was set.
PreferForwardCostFunction:This cost function class was designed with robots in mind having good sensor coverage only in front of the robot (tilting laser). The costs function prefers motions in the front direction, penalizing backwards and strafing motions. On other robots or in other domains this may be very undesirable behavior.


类的参数与动态调整
在这些类中出现的参数可以被分类为:
-robot configuration
-goal tolerance
-forward simulation
-trajectory scoring
-oscillation prevention
-global plan
 ……
……
在参数调整中会很麻烦,使用rqt_reconfigure toll来动态的调整参数:
rosrun rqt_reconfigure rqt_reconfigure
主体计算
主体的思想在TrajectoryPlannerROS::computerVelocityCommands():
bool TrajectoryPlannerROS::computeVelocityCommands(geometry_msgs::Twist& cmd_vel){
if (! isInitialized()) {
ROS_ERROR("This planner has not been initialized, please call initialize() before using this planner");
return false;
}
std::vector<geometry_msgs::PoseStamped> local_plan;
tf::Stamped<tf::Pose> global_pose;
if (!costmap_ros_->getRobotPose(global_pose)) {
return false;
}
std::vector<geometry_msgs::PoseStamped> transformed_plan;
//get the global plan in our frame
if (!transformGlobalPlan(*tf_, global_plan_, global_pose, *costmap_, global_frame_, transformed_plan)) {
ROS_WARN("Could not transform the global plan to the frame of the controller");
return false;
}
//now we'll prune the plan based on the position of the robot
if(prune_plan_)
prunePlan(global_pose, transformed_plan, global_plan_);
tf::Stamped<tf::Pose> drive_cmds;
drive_cmds.frame_id_ = robot_base_frame_;
tf::Stamped<tf::Pose> robot_vel;
odom_helper_.getRobotVel(robot_vel);
//if the global plan passed in is empty... we won't do anything
if(transformed_plan.empty())
return false;
tf::Stamped<tf::Pose> goal_point;
tf::poseStampedMsgToTF(transformed_plan.back(), goal_point);
//we assume the global goal is the last point in the global plan
double goal_x = goal_point.getOrigin().getX();
double goal_y = goal_point.getOrigin().getY();
double yaw = tf::getYaw(goal_point.getRotation());
double goal_th = yaw;
//check to see if we've reached the goal position
if (xy_tolerance_latch_ || (getGoalPositionDistance(global_pose, goal_x, goal_y) <= xy_goal_tolerance_)) {
//if the user wants to latch goal tolerance, if we ever reach the goal location, we'll
//just rotate in place
if (latch_xy_goal_tolerance_) {
xy_tolerance_latch_ = true;
}
double angle = getGoalOrientationAngleDifference(global_pose, goal_th);
//check to see if the goal orientation has been reached
if (fabs(angle) <= yaw_goal_tolerance_) {
//set the velocity command to zero
cmd_vel.linear.x = 0.0;
cmd_vel.linear.y = 0.0;
cmd_vel.angular.z = 0.0;
rotating_to_goal_ = false;
xy_tolerance_latch_ = false;
reached_goal_ = true;
} else {
//we need to call the next two lines to make sure that the trajectory
//planner updates its path distance and goal distance grids
tc_->updatePlan(transformed_plan);
Trajectory path = tc_->findBestPath(global_pose, robot_vel, drive_cmds);
map_viz_.publishCostCloud(costmap_);
//copy over the odometry information
nav_msgs::Odometry base_odom;
odom_helper_.getOdom(base_odom);
//if we're not stopped yet... we want to stop... taking into account the acceleration limits of the robot
if ( ! rotating_to_goal_ && !base_local_planner::stopped(base_odom, rot_stopped_velocity_, trans_stopped_velocity_)) {
if ( ! stopWithAccLimits(global_pose, robot_vel, cmd_vel)) {
return false;
}
}
//if we're stopped... then we want to rotate to goal
else{
//set this so that we know its OK to be moving
rotating_to_goal_ = true;
if(!rotateToGoal(global_pose, robot_vel, goal_th, cmd_vel)) {
return false;
}
}
}
//publish an empty plan because we've reached our goal position
publishPlan(transformed_plan, g_plan_pub_);
publishPlan(local_plan, l_plan_pub_);
//we don't actually want to run the controller when we're just rotating to goal
return true;
}
tc_->updatePlan(transformed_plan);
//compute what trajectory to drive along
Trajectory path = tc_->findBestPath(global_pose, robot_vel, drive_cmds);
map_viz_.publishCostCloud(costmap_);
//pass along drive commands
cmd_vel.linear.x = drive_cmds.getOrigin().getX();
cmd_vel.linear.y = drive_cmds.getOrigin().getY();
cmd_vel.angular.z = tf::getYaw(drive_cmds.getRotation());
//if we cannot move... tell someone
if (path.cost_ < 0) {
ROS_DEBUG_NAMED("trajectory_planner_ros",
"The rollout planner failed to find a valid plan. This means that the footprint of the robot was in collision for all simulated trajectories.");
local_plan.clear();
publishPlan(transformed_plan, g_plan_pub_);
publishPlan(local_plan, l_plan_pub_);
return false;
}
ROS_DEBUG_NAMED("trajectory_planner_ros", "A valid velocity command of (%.2f, %.2f, %.2f) was found for this cycle.",
cmd_vel.linear.x, cmd_vel.linear.y, cmd_vel.angular.z);
// Fill out the local plan
for (unsigned int i = 0; i < path.getPointsSize(); ++i) {
double p_x, p_y, p_th;
path.getPoint(i, p_x, p_y, p_th);
tf::Stamped<tf::Pose> p =
tf::Stamped<tf::Pose>(tf::Pose(
tf::createQuaternionFromYaw(p_th),
tf::Point(p_x, p_y, 0.0)),
ros::Time::now(),
global_frame_);
geometry_msgs::PoseStamped pose;
tf::poseStampedTFToMsg(p, pose);
local_plan.push_back(pose);
}
//publish information to the visualizer
publishPlan(transformed_plan, g_plan_pub_);
publishPlan(local_plan, l_plan_pub_);
return true;
}