Mean Field Multi-Agent Reinforcement Learning
这是18 ICML的文章,文中的证明推理很多,主要借鉴一下思想。
文章首先阐述了以前的一些找Nash平衡等方法对于大规模agent合作或者对抗的计算量要求很大。因此提出了这个算法。
首先介绍了Stochastic Game的环境:
![]()
第一个参数是状态空间,随后的N个参数是agent i的动作空间,在随后是agent i 的奖励函数,p是转移函数,y是折扣因子
每个agent j 根据自己的策略![]() 选择动作,其中
选择动作,其中![]() 是agent j 在动作空间上的概率分布。
是agent j 在动作空间上的概率分布。
![]() 表示joint policy,在这个joint policy下,agent j 的 value function可以写成:
表示joint policy,在这个joint policy下,agent j 的 value function可以写成:

agent j 的Q function可以写成:![]()
所以value function又可以被Q表示为![]()
随后是Nash Q-learning
每个agent的目标学习一个最优的策略去maximize他们的value function,对于agent j 取最优的policy 取决于 joint policy。
因此在Stochastic game 中Nash 平衡被描述为:
在Nash平衡中每个agent把自己最好的respones反馈给其他的agent,因此给出了一个Nash policy ![]() 的value function
的value function
![]()
因此此时我们可以使用Nash value function重写Q function:
![]()
其中![]() ,
,![]()
随后开始介绍Mean Field MARL:
首先为了解决所有的agent不能都同时策略的进行行为并同时更新标准Q function这一问题。
我们重构了Q function:
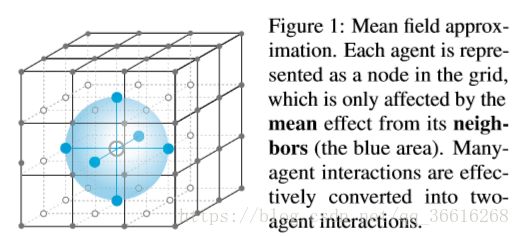
![]() 是 j 附近的agent。这里不同的N(j)要根据不同的环境,有区别的取设置
是 j 附近的agent。这里不同的N(j)要根据不同的环境,有区别的取设置
这样就有效的降低了整体的复杂度。
随后是Mean Field Approximation:(这一阶比较趋紧与证明)
我们根据1971年提出的mean field theory可以用于拟合![]()
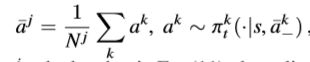
这里我们考虑离散的动作空间,同时我们把agent j 的aj使用one hot 编码:![]() ,随后我们根据agent j的邻居agents计算 mean action 平均动作
,随后我们根据agent j的邻居agents计算 mean action 平均动作![]() ,随后我们把每个邻居agent k的的one hot action ak全部用
,随后我们把每个邻居agent k的的one hot action ak全部用 ![]() 与
与![]() 的加和表示:
的加和表示:

其中![]() ,可以被解释为agent j的附近agents动作的经验分布。
,可以被解释为agent j的附近agents动作的经验分布。
随后是对Qj的推到:
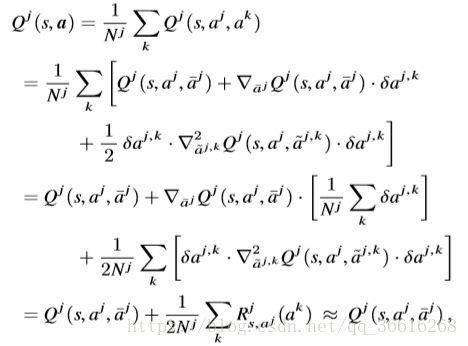
最后的结论很重要也就是![]() 最后近似等于
最后近似等于![]() 。
。
我们可以看下面这个图来近似:
此时Q函数的更新函数可以写为:
![]()
此时agent j的mean field 的value function 可以写成:

接着我们给出了计算每个agent j 的最好策略![]() 的迭代过程,其中mean action
的迭代过程,其中mean action ![]() :
:
 ,eq(11) 随后policy
,eq(11) 随后policy ![]() 根据mean action
根据mean action![]() 更改:
更改:
 eq(12)
eq(12)
为了区分与Nash平衡,我们标记mean field![]() ,Q function:
,Q function:
![]() 。随后开始证明mean field会像Nash 平衡一样收敛
。随后开始证明mean field会像Nash 平衡一样收敛
MFQ:
loss function :![]()
![]()
也就是说yj是Q target计算出来的,![]() 是Q est计算出来的
是Q est计算出来的
伪代码:

MFAC:

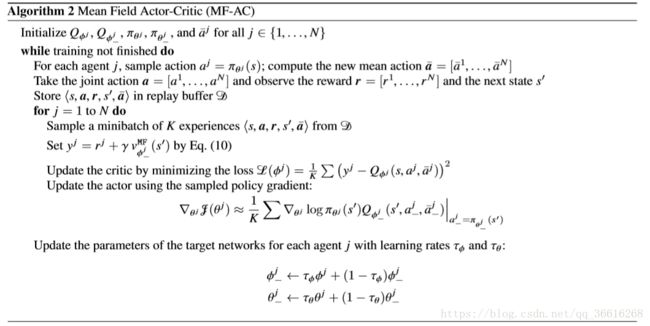
他的所有实验都是共享网络的,也就是一个Target Net 一个Est Net,然后每个agent之间唯一的不同点就是mean action的影响,不然只要这个agent在这个位置,那么他就会做出确定的动作,而不会考取其他agent的动作。