Hetero-ConvLSTM: A Deep Learning Approach to Traffic
Accident Prediction on Heterogeneous Spatio-Temporal Data****(****KDD2018****)
Author: Zhuoning Yuan, Xun Zhou, Tianbao Yang
中文提示:交通事故预测
摘要:
预测交通事故是改善交通和公共安全以及安全路线的关键问题。由于空间和时间事故的稀疏性以及环境的空间异质性(例如,城市与农村),这个问题具有挑战性。 大多数先前由领域研究人员进行的交通事故预测研究只是在有限数据上应用经典预测模型,而没有恰当地解决上述挑战,从而导致性能并不令人满意。 最近的一些小型作品试图将深度学习用于交通事故预测。 然而,他们要么忽略时间信息,要么仅使用来自小而均匀的研究区域(城市)的数据,没有同时正确处理空间异质性和时间自相关。
在本文中,我们使用卷积长短期记忆(ConvLSTM)神经网络模型对交通事故预测问题进行了全面研究。8年来,爱荷华州的大型数据集中提取了许多详细的功能,如天气,环境,道路状况和交通量。为了解决数据中的空间异质性挑战,我们提出了一个Hetero-ConvLSTM框架,其中在基本的ConvLSTM模型之上实现了一些新颖的想法,例如合并空间图特征和空间模型集合。 对整个爱荷华州的8年数据进行的大量实验表明,提出的框架可以做出相当准确的预测,并显着提高基线方法的预测准确性。
为了解决数据中的空间异质性挑战,我们提出了一个Hetero-ConvLSTM框架,其中在基本的ConvLSTM模型之上实现了一些新颖的想法,例如合并空间图特征和空间模型集成。
事故发生原因多:
随机因素+常见因素
环境因素
灯光照明因素
天气
人为环境:当前车流量, 当前车速
道路结构 弯曲程度 车道数
驾驶人因素:
驾驶人疲劳、分心
驾驶车速过快
汽车抛锚
城镇影响因素不同。 往年的工作没有考虑空间异质性和时间自相关,或使用传统的回归方法。 事故多发地:Interasection 交叉路口。 大桥、河流 道路弯曲度高
研究方法:
将一个州分成网格状
将车流量、道路状况、降水量、温度、卫星地图收集起来并匹配到网格中去。
给定交通事故的次数和其他城市或环境的特征,我们预测未来时隙中网格中发生交通事故的次数。
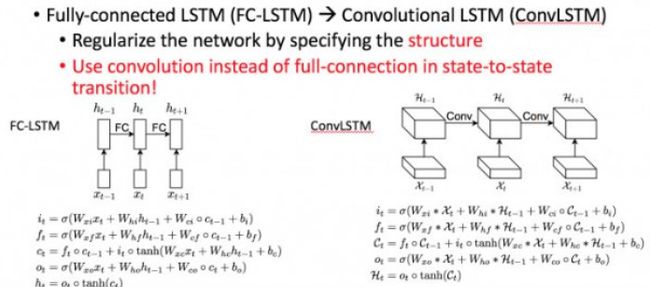
空间深度学习——ConvLSTM
卷积 LSTM
使用数据
1 2006-2013 8年的摩托车碰撞数据 道路情况
2 高分辨率的降水量数据 4km范围每小时的降水量 8026瓦?
3 高速(主干道)天气信息系统 温度和风速风向
4 路网结构 包括年日均交通量(AADT)
5 卫星图数据 从Google Earth获取
6 交通快照数据 记录路口每个地方的双向车流量
方法:
划分网格 5km*5km 1天一个时隙 用前t-1天预测第t天的
Laplacian eigenmaps and spectral techniques for embedding and clustering
拉普拉斯矩阵:https://blog.csdn.net/v_JULY_v/article/details/40738211
S 空间划分 T 时间划分
C(s,t)发生次数(标签) F(s,t)特征
特征提取:
时不变特征:
路网mask 把道路分割出来置为1
道路状态特征 交叉路口的数量、车道数、道路功能、道路弯曲、AADT 年日均交通量
谷歌卫星图
时变特征:
1. 降水量 4km
2. 天气 温度(对附近k站点求均值,将一天中的均值作为结果)、风速、风向(?)、露点
3. 车流量:对于每个grid网格,侦测3个最近的camera统计数据,记录每小时网格路段中的流量
4. 日期数据包括:日/年 日/周 月 季度 是否节日
空间图特征
人口密度不同所产生的交通事故分布不同
G(V,E) 顶点和边 拉普拉斯矩阵
L=D-W(D为图的度矩阵,W是图的邻接(边与边的邻接关系,0为断开,1为连着)矩阵)
先写出W 然后把每列元素加起来放在对角线成为D
L=D-W****得到拉普拉斯矩阵。
对L进行特征值分解,分解到对应的特征向量 令V为特征向量m*K(k个重要特征,这里k=10)用每行的V去生成一个新的特征,对应于每个路段,表征道路的拓扑结构。
其过程和谱聚类相似。
对于每个网格中有多个路段的,使用最长的路段作为其特征表示,这种近似是合理的,因为同一网格单元中的路段通常是连接的,并且往往具有非常相似的空间图形特征。这里是10个时不变的空间图特征。
此处该特征具有一定的语义信息。
特征值分析
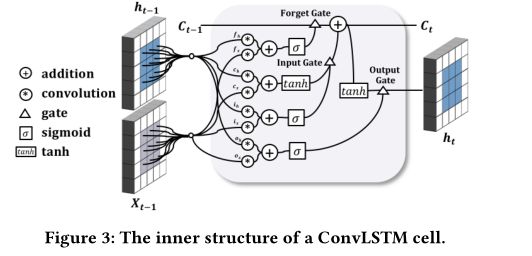
卷积LSTM
Input-to-state state-to-state transitions
ConvLSTM单元的输入到状态和状态到状态的转换包含输出三维张量的卷积运算。
虽然我们结合了第4.3节中详述的SpatialGraph功能,但由于环境条件的变化,模型精度可能会受到影响。 同时训练单个大型ConvLSTM模型可能需要过多的时间。
使用滑动窗口解决 不同参数的窗口学习网络模型
一个单独的cell
提出了Hetero-ConvLSTM框架。首先,我们使用移动窗口获取研究区域中子区域的数据,并为每个具有不同参数的窗口学习ConvLSTM网络模型。 选择窗口的大小使得可以在合理的时间内训练模型,同时该区域仍然足够大以包括足够的训练样本。 在我们的例子中,我们选择一个大小为32×32的区域。
对于每一个区域的窗口,我们建立一ConvLSTM模型。4层 ConvLSTM 每一层有128个滤波器(核)来抽取特征。
两层之间使用BN(批归一化层)加速训练过程。对于逐点预测,我们串联所有输出并让他们变成1*1的前向卷积层来为每一步时间t生成二维的映射。
用滑动窗去训练模型每个窗口为32*32,滑动步长为16,所以每次都有50%的覆盖。最后采用加权的方法去结合。 而每个区域Si的prediction值可以由这块区域所被覆盖的window加权得到,这个权重可以由线性回归去学习得到。
实验部分:
用过去7天的数据去预测后7天的交通事故数量。
14帧,7帧训练,7帧测试。前面2006-2012为训练集,2013作为测试集。 训练集中10%作为验证集。
Metric:MSE CE(交叉熵) RMSE
对于每一个region,我们每次都添加1-2个特征组并且去计算MSE、CE、RMSE。
Urban区域:RN V RC CL 可以带来误差降低;
E 空间图特征影响弱 可能异质性较低
RA(rainfall) RW(road weather,wind speed/temperature)E 降低误差
Cross-k 函数是 两种对象空间的聚类倾向的度量
创新点:
首次利用空间的多源数据、使用深度学习模型去预测 空间异质数据
将城镇结合起来,预测整体的下一时段的危险图,预测结果是次数。
用模型融合的方式结合若干模型,其中使用滑动窗的方法,通过线性回归得到滑动窗所占的权重,一个区域s由多个滑动窗覆盖,最终由其覆盖的几个滑动窗加权得到结果。
对不同的参数设置、特征集等进行实验,发现乡村事故发生往往和天气和空间图特征有关,城市往往和道路情况、交通流量、节假日信息有关。
使用空间图,引入拉普拉斯矩阵和特征值分析的方法,对路网中各个部分的图特征进行提取,使得其具有空间语义特征。