Ubuntu16.04安装ROS -----------(小白篇)
我个人本次采用的是 VMware + ubuntu16.04 + ROS。
鉴于本人是初步学习,没有装双系统。对于使用虚拟机来玩ROS还不知道会发生什么奇怪的问题(据大神说,会出现各种奇葩问题),哎,先安装试试看喽~
先推荐两个网站:(1)http://wiki.ros.org/kinetic/Installation/Ubuntu
(2) http://wiki.ros.org/kinetic/Installation/Ubuntu (博主:小萌是个球,他的文章也很详细哦,第一次接触的话看看他的文章也是相当受益的)
咳咳,下面进入正题:
ROS和Ubuntu都是存在不同版本的,而且ROS比较傲娇,每一个版本都对应着一个或两个ubuntu版本。
本文的配置是ubuntu16.04,安装的是ROS Kinetic Kame。好啦,选好版本就可以开始安装啦。
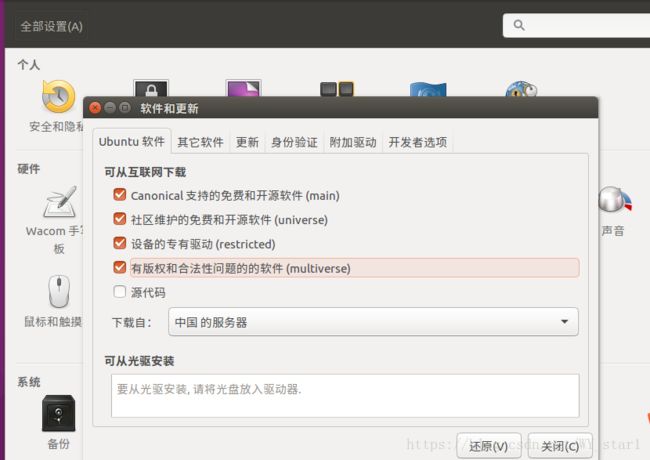
1. 配置Ubuntu软件仓库(configure your ubuntu repositories)
配置Ubuntu 软件仓库(repositories) 安装模式(开启"restricted"、"universe" 和 "multiverse"这三种)
2. (1)添加源(setup your sources.list)
我们要设置电脑可以从 packages.ros.org 接收软件,新建一个terminal(控制台):ctrl+alt+t,输入以下命令:
sudo sh -c 'echo ''deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc)main''> /etc/apt/sources.list.d/ros-latest.list'(2)添加秘钥(set up your keys)
sudo apt-key adv -keyserver hkp://ha.poolsks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA1163. 进行安装(installation)
(1)要确保Debian软件包是最新版本哟
sudo apt-get update进行完这步,还是要进行一个小选择哦。因为ROS分很多版本,有很多不同的库和工具。那既然我们初学呢,就安装这款好啦,它可不容小觑,包含 ROS、rqt、rviz、机器人通用库、2D/3D 模拟器、导航、2D/3D感知呐。
sudo apt-get install ros-kinetic-desktop-full会需要一丢丢时间哦,坐等它安装啦~
(2)安装完成后,可以使用下条命令查看可用的软件包哦
apt-cache search ros-kinetic虽然安装完成了,但是还不能使用它哦,怎么办呐,请继续看下面啦......
4. 初始化 rosdep(initialize rosdep)
rosdep可以在我们需要编译某些源码的时候为其安装一些依赖项,同时也是某些ROS核心功能组件所必需用到的工具。
sudo rosdep init
rosdep update5. 环境配置(environment setup)
echo ''source /opt/ros/kinetic/setup.bash'' >> ~/.bashrc
source ~/.bashrc这两条命令可是灰常重要的呢,具体怎么重要呢,下篇见喽~
6.构建依赖项(dependencies for building packages)
rosinstall 是一个经常使用的命令行工具,可以从一个命令下载许多个ROS包的源树。
要安装这个工具和其他构建ROS包的依赖项,运行这条命令就OK啦:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool buid-essential截止到这里,ROS就算是安装成功喽~
为了保险起见,当然还是要测试一下喽~ first 先关机重启一下啦
打开terminal,来敲命令:
(1)启动ROS MASTER:
roscore哈哈,是不是显示 started core service [/rosout]啦,那就哦了~顺利进行下一步吧
要是没有呢,哎那就再重新来一次ba~
(2)重新打开一个terminal,我们要启动小海龟仿真器滴滴滴:
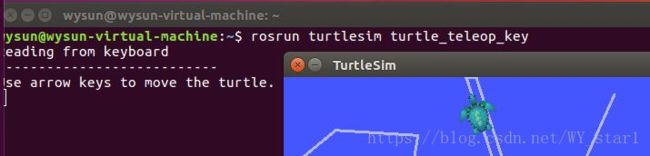
rosrun turtlesim turtlesim_node(3)哎呀,还是要重新打开一个终端哦,开启控制节点,认真点小海龟要动起来啦:
rosrun turtlesim turtle_teleop_key选中我们的控制窗口,按方向键就可以指挥小海龟了哦~
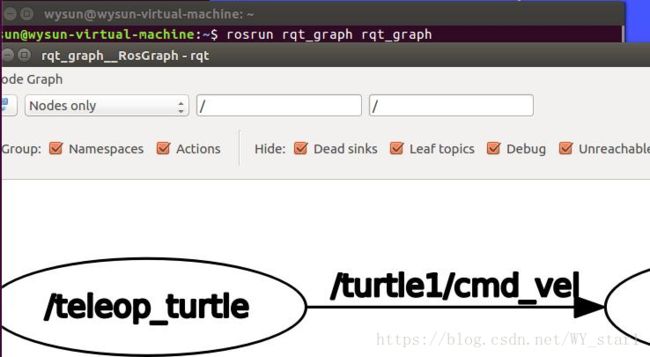
(4)好不好奇它的节点关系呀,那就再打开一个界面,看一下ROS的图形化界面,展示一下结点关系:
rosrun rqt_graph rqt_graph就是这样啦:
(5)测试OK,我们的ROS安装么有任何问题~
如果有问题的话,欢迎各位大神不吝赐教~我也刚刚接触,不到位的地方欢迎大家指出~