ROS机器人操作系统(navigation)
1. Navigation Stack
1.1 Navigation Stack
Navigation Stack是一个ROS的metapackage,里面包含了ROS在路径规划、定位、地图、异常行为恢复等方面的package,其中运行的算法都堪称经典。Navigation Stack的主要作用就是路径规划,通常是输入各传感器的数据,输出速度。一般我们的ROS都预装了Navigation。
Navigation Stack的源代码位于https://github.com/ros-planning/navigation,包括了以下几个package:
| 包名 | 功能 |
|---|---|
| amcl | 定位 |
| fake_localization | 定位 |
| map_server | 提供地图 |
| move_base | 路径规划节点 |
| nav_core | 路径规划的接口类,包括base_local_planner、base_global_planner和recovery_behavior三个接口 |
| base_local_planner | 实现了Trajectory Rollout和DWA两种局部规划算法 |
| dwa_local_planner | 重新实现了DWA局部规划算法 |
| parrot_planner | 实现了较简单的全局规划算法 |
| navfn | 实现了Dijkstra和A*全局规划算法 |
| global_planner | 重新实现了Dijkstra和A*全局规划算法 |
| clear_costmap_recovery | 实现了清除代价地图的恢复行为 |
| rotate_recovery | 实现了旋转的恢复行为 |
| move_slow_and_clear | 实现了缓慢移动的恢复行为 |
| costmap_2d | 二维代价地图 |
| voxel_grid | 三维小方块(体素?) |
| robot_pose_ekf | 机器人位姿的卡尔曼滤波 |
这么多package,你可能会觉得很乱,不过担心,在使用中其实还是比较简单的,我们接下来会对常用的主要功能进行介绍。
1.2 Navigation工作框架
机器人的自主导航功能基本全靠Navigation中的pacakge,来看这张图:
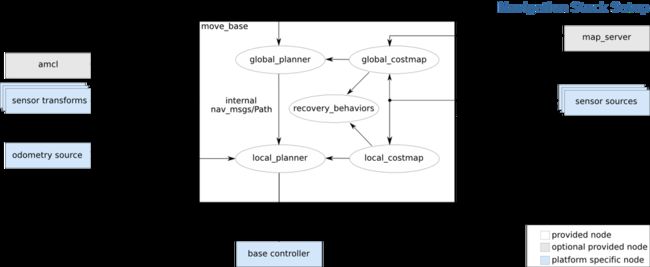
上图中位于导航功能正中心的是move_base节点,可以理解为一个强大的路径规划器,在实际的导航任务中,你只需要启动这一个node,并且给他提供数据,就可以规划出路径和速度。 move_base之所以能做到路径规划,是因为它包含了很多的插件,像图中的白色圆圈global_planner、local_planner、global_costmap、local_costmap、recovery_behaviors。这些插件用于负责一些更细微的任务:全局规划、局部规划、全局地图、局部地图、恢复行为。而每一个插件其实也都是一个package,放在Navigation Stack里。 关于move_base我们后面会进一步介绍,先来看看move_base外围有哪些输入输出。
输入
/tf:提要提供的tf包括map_frame、odom_frame、base_frame以及机器人各关节之间的完成的一棵tf树。/odom:里程计信息/scan或/pointcloud:传感器的输入信息,最常用的是激光雷达(sensor_msgs/LaserScan类型),也有用点云数据(sensor_msgs/PointCloud)的。/map:地图,可以由SLAM程序来提供,也可以由map_server来指定已知地图。
以上四个Topic是必须持续提供给导航系统的,下面一个是可随时发布的topic:
move_base_simple/goal:目标点位置。
有几点需要注意:
1.move_base并不会去发布tf,因为对于路径规划问题来说,假设地图和位置都是已知的,定位和建图是其他节点的事情。 2.sensor_topics一般输入是激光雷达数据,但也有输入点云的情况。 3.图中map_server是灰色,代表可选,并不表示/map这个topic是可选,必须提供地图给move_base。
输出
/cmd_vel:geometry_msgs/Twist类型,为每一时刻规划的速度信息。
2. move_base
2.1 move_base与插件
move_base算得上是Navigation中的核心节点,之所以称之为核心,是因为它在导航的任务中处于支配地位,其他的一些package都是它的插件。 来看这张图 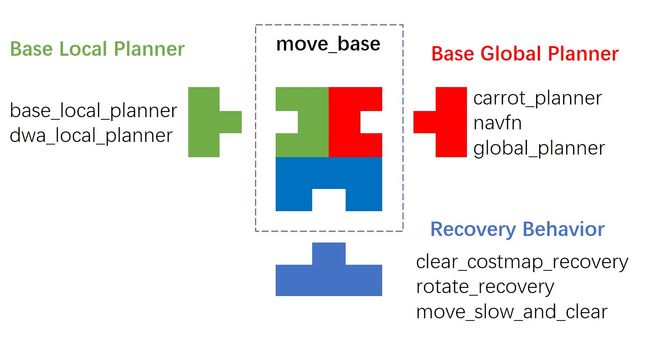 move_base要运行起来,需要选择好插件,包括三种插件:
move_base要运行起来,需要选择好插件,包括三种插件:base_local_planner、base_global_planner和recovery_behavior,这三种插件都得指定,否则系统会指定默认值。
Navigation为我们提供了不少候选的插件,可以在配置move_base时选择。
base_local_planner插件:
- base_local_planner: 实现了Trajectory Rollout和DWA两种局部规划算法
- dwa_local_planner: 实现了DWA局部规划算法,可以看作是base_local_planner的改进版本
base_global_planner插件:
- parrot_planner: 实现了较简单的全局规划算法
- navfn: 实现了Dijkstra和A*全局规划算法
- global_planner: 重新实现了Dijkstra和A*全局规划算法,可以看作navfn的改进版
recovery_behavior插件:
- clear_costmap_recovery: 实现了清除代价地图的恢复行为
- rotate_recovery: 实现了旋转的恢复行为
- move_slow_and_clear: 实现了缓慢移动的恢复行为
除了以上三个需要指定的插件外,还有一个costmap插件,该插件默认已经选择好,无法更改。
以上所有的插件都是继承于nav_core里的接口,nav_core属于一个接口package,它只定义了三种插件的规范,也可以说定义了三种接口类,然后分别由以上的插件来继承和实现这些接口。因此如果你要研究路径规划算法,不妨研究一下nav_core定义的路径规划工作流程,然后仿照dwa_local_planner或其他插件来实现。
除了以上三个需要指定的插件外,还有一个costmap插件,该插件默认已经选择好,默认即为costmap_2d,不可更改,但costmap_2d提供了不同的Layer可以供我们设置,在9.3节我们会进行介绍。
在这里插件的概念并不是我们抽象的描述,而是在ROS里catkin编译系统能够认出的,并且与其他节点能够耦合的C++库,插件是可以动态加载的类,也就是说插件不需要提前链接到ROS的程序上,只需在运行时加载插件就可以调用其中的功能。
具体关于插件的介绍,有兴趣请看http://wiki.ros.org/pluginlib,本书不做过多介绍。
2.2 插件选择(参数)
既然我们知道了move_base具体的一些插件,那如何来选择呢?其实非常简单。在move_base的参数设置里可以选择插件。 move_base的参数包括以下内容:
| 参数 | 默认值 | 功能 |
|---|---|---|
| ~base_global_planner | navfn/NavfnROS | 设置全局规划器 |
| ~base_local_planner | base_local_planner/TrajectoryPlannerROS | 设置局部规划器 |
| ~recovery_behaviors | [{name: conservative_reset, type: clear_costmap_recovery/ClearCostmapRecovery}, {name: rotate_recovery, type: rotate_recovery/RotateRecovery}, {name: aggressive_reset, type: clear_costmap_recovery/ClearCostmapRecovery}] | 设置恢复行为 |
| … | … | … |
除了这三个选择插件的参数,还有控制频率、误差等等参数。 具体请看http://wiki.ros.org/move_base介绍。在ROS-Academy-for-Beginners的代码中的navigation_sim_demo例子中,由于要配置的参数太多,通常会将配置写在一个yaml文件中,我们用param/move_base_params.yaml来保存以上参数。而关于一些具体插件,比如dwa_local_planner则也会创建一个文件param/dwa_local_planner.yaml来保存它的设置。
2.3 Topic与Service
move_base输入输出的Topic在9.1节已经做了介绍,这里不再赘述。
move_base包含的Service包括:
- make_plan: nav_msgs/GetPlan类型,请求为一个目标点,响应为规划的轨迹,但不执行该轨迹。
- clear_unknown_space: std_srvs/Empty类型,允许用户清除未知区域地图。
- clear_costmaps: std_srvs/Empty类型,允许用户清楚代价地图上的障碍物。
3. costmap
costmap是Navigation Stack里的代价地图,它其实也是move_base插件,本质上是C++的动态链接库,用过catkin_make之后生成.so文件,然后move_base在启动时会通过动态加载的方式调用其中的函数。
3.1 代价地图
之前我们在介绍SLAM时讲过ROS里的地图的概念,地图就是/map这个topic,它也是一张图片,一个像素代表了实际的一块面积,用灰度值来表示障碍物存在的可能性。然而在实际的导航任务中,光有一张地图是不够的,机器人需要能动态的把障碍物加入,或者清楚已经不存在的障碍物,有些时候还要在地图上标出危险区域,为路径规划提供更有用的信息。
因为导航的需要,所以出现了代价地图。你可以将代价地图理解为,在/map之上新加的另外几层地图,不仅包含了原始地图信息,还加入了其他辅助信息。
代价地图有一下特点: 1.首先,代价地图有两张,一张是local_costmap,一张是global_costmap,分别用于局部路径规划器和全局路径规划器,而这两个costmap都默认并且只能选择costmap_2d作为插件。 2. 无论是local_costmap还是global_costmap,都可以配置他们的Layer,可以选择多个层次。costmap的Layer包括以下几种:
- Static Map Layer:静态地图层,通常都是SLAM建立完成的静态地图。
- Obstacle Map Layer:障碍地图层,用于动态的记录传感器感知到的障碍物信息。
- Inflation Layer:膨胀层,在以上两层地图上进行膨胀(向外扩张),以避免机器人的外壳会撞上障碍物。
- Other Layers:你还可以通过插件的形式自己实现costmap,目前已有
Social Costmap Layer、Range Sensor Layer等开源插件。
可以同时选择多个Layer并存。
3.2 地图插件的选择
与9.2节中move_base插件的配置类似,costmap配置也同样用yaml 来保存,其本质是维护在参数服务器上。由于costmap通常分为local和global的coastmap,我们习惯把两个代价地图分开。以ROS-Academy-for-Beginners为例,配置写在了param文件夹下的global_costmap_params.yaml和local_costmap_params.yaml里。 global_costmap_params.yaml:
global_costmap:
global_frame: /map
robot_base_frame: /base_footprint
update_frequency: 2.0
publish_frequency: 0.5
static_map: true
rolling_window: false
transform_tolerance: 0.5
plugins:
- {name: static_layer, type: "costmap_2d::StaticLayer"}
- {name: voxel_layer, type: "costmap_2d::VoxelLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
local_costmap_params.yaml:
local_costmap:
global_frame: /map
robot_base_frame: /base_footprint
update_frequency: 5.0
publish_frequency: 2.0
static_map: false
rolling_window: true
width: 4.0
height: 4.0
resolution: 0.05
origin_x: 5.0
origin_y: 0
transform_tolerance: 0.5
plugins:
- {name: voxel_layer, type: "costmap_2d::VoxelLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
在plugins一项中可以设置Layer的种类,可以多层叠加。在本例中,考虑到局部地图并不需要静态地图,而只考虑传感器感知到的障碍物,因此可以删去StaticLayer。
4. map_server & amcl
在某些固定场景下,我们已经知道了地图(无论通过SLAM还是测量),这样机器人每次启动最好就能直接加载已知地图,而是每次开机都重建。在这种情况下,就需要有一个节点来发布/map,提供场景信息了。
4.1 map_server
map_server是一个和地图相关的功能包,它可以将已知地图发布出来,供导航和其他功能使用,也可以保存SLAM建立的地图。
要让map_server发布/map,需要输入给它两个文件:
- 地图文件,通常为pgm格式;
- 地图的描述文件,通常为yaml格式
例如在ROS-Academy-for-Beginners里,我们提供了软件博物馆的地图文件,见slam_sim_demo/maps下:
Software_Museum.pgm 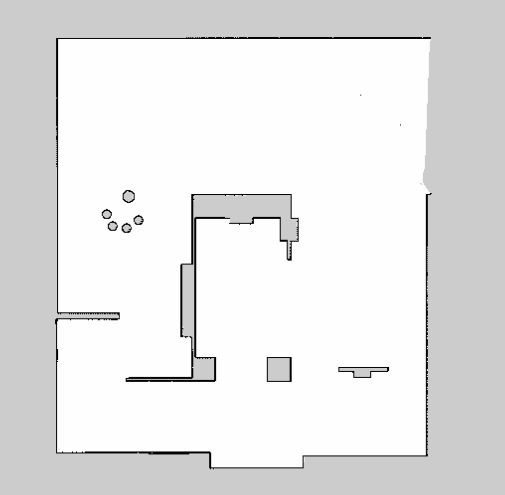
Software_Museum.yaml
image: Software_Museum.pgm #指定地图文件
resolution: 0.050000 #地图的分辨率 单位为m/pixel
origin: [-25.000000, -25.000000, 0.000000] #地图的原点
negate: 0 #0代表 白色为空闲 黑色为占据
occupied_thresh: 0.65 #当占据的概率大于0.65认为被占据
free_thresh: 0.196 #当占据的概率小于0.196认为无障碍
其中占据的概率 occ = (255-color_avg)/255.0, color_avg为RGB三个通道的平均值。
有了以上两个文件,你可以通过指令来加载这张地图,map_server相关命令如下:
| map_server命令 | 作用 |
|---|---|
rosrun map_server map_server Software_Museum.yaml |
加载自定义的地图 |
rosrun map_server map_saver -f mymap |
保存当前地图为mymap.pgn和mymap.yaml |
当我运行rosrun map_server map_server ***.yaml时,会有以下的通信接口:
Topic
通常我们是在launch文件中加载map_server,发布地图。而map_server发布的消息包括:
- /map_metadata: 发布地图的描述信息
- /map: 发布锁存的地图消息
Service
amcl的服务只有一个:
- static_map: 用于请求和响应当前的静态地图。
Param
amcl有一个参数需要设置,就是发布地图的frame。
- ~frame_id: string类型,默认为map。 绑定发布的地图与tf中的哪个frame,通常就是map。
有两个概念不要搞混淆,map既是一个topic,也是一个frame,前者是topic通信方式中的一个话题,信息交互的频道,后者是tf中的一个坐标系,map_frame需要和其他的frame相连通。
4.2 amcl
Adaptive Mentcarto Localization(AMCL),蒙特卡洛自适应定位是一种很常用的定位算法,它通过比较检测到的障碍物和已知地图来进行定位。
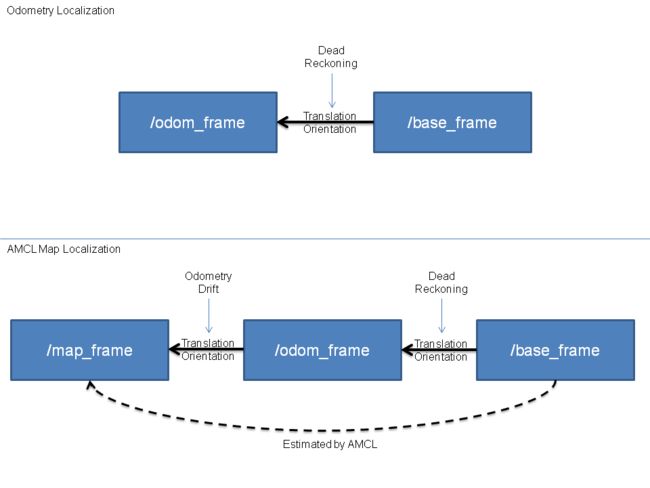
AMCL上的通信架构如上图所示,与之前SLAM的框架很像,最主要的区别是/map作为了输入,而不是输出,因为AMCL算法只负责定位,而不管建图。 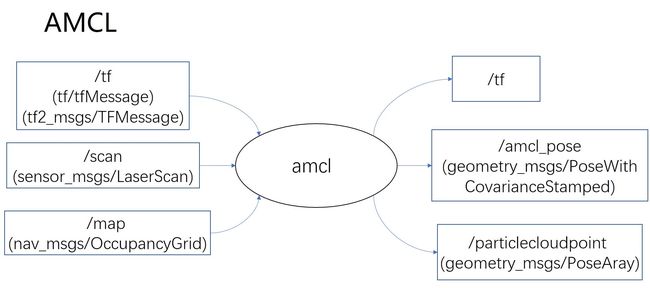
同时还有一点需要注意,AMCl定位会对里程计误差进行修正,修正的方法是把里程计误差加到map_frame和odom_frame之间,而odom_frame和base_frame之间是里程计的测量值,这个测量值并不会被修正。这一工程实现与之前gmapping、karto的做法是相同的。