激光SLAM——第四节(激光SLAM的前端配准方法)
@[目录]
ICP变种方法
– 第四章 激光的前端配准算法(ICP)
4.1、2、3、4的ICP方法,一个比一个精度高,计算量也大。
点云匹配算法是为了匹配两帧点云数据,从而得到传感器(激光雷达或摄像头)前后的位姿差,即****里程数据。匹配算法已经从最初的ICP方法发展出了多种改进的算法NDT。他们分别从配准点的寻找,误差方程等等方面进行了优化。下面分别介绍:
4.1 ICP匹配方法
点对点的icp,可以称PP-icp
- Iterative closest point:迭代最近点(最原始的icp算法)
- 简介:前端匹配(配准),后端优化;套路是固定的,即求解最小二乘解。基于图优化的slam如果做得精度高,那多半是前端配准做得棒,才可以拉开差距。
- 目地:配准两帧点云,求欧式变换(R、t变换);
- 意义:两个安装方法、角度不同的雷达,对同一个实体看到的样子是不一样的(距离、姿态等),设为两个雷达探知到的同一个实体位姿为A、B,求A、B位姿的变换,(R、t变换、欧式变换问题)
- 两帧点云集合X、P:
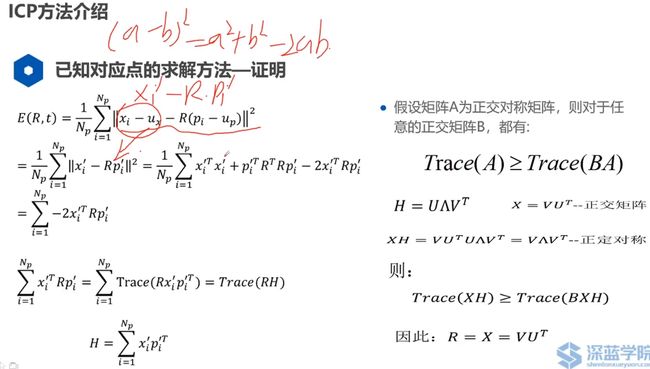
– 4.1.1 已知对应解的求解方法–证明
- 一般是没办法不迭代就知道对应解的;

勘误:假设矩阵A为正定对称矩阵
– 4.1.2 未知对应点的求解方法
笔记的3.2.4同此;
迭代最近点求解流程(ICP通用方法):
- 1、寻找对应点(需要初始输入的R、t),由R、t求‘对应点’;
- 2、根据对应点,再求解进一步的R、t,由‘对应点’求解R、t;
- 3、对点云进行转换,计算误差;
- 4、不断重复123点,迭代求解,直到误差小于某阈值;
将匹配的方法求解成EM算法思想;

4.2 PL-ICP匹配方法
后面的ICP的优化方法,都是基于这个优化思想。
- PL:point to line
- 示意图:
- a黄色表示实际曲线,蓝色表示激光采样的点;黑色表示和黄色近似的‘曲面’。
- b是点对点,势场是圆,往四周扩展递增,和实际不符合;
- c是点对线的势场模型,势场都是平行的,往外递增,比较符合实际。

– 4.2.1基本思想:
- 1、激光点是对实际环境的曲面的离散采样;
- 2、重要的不是激光点,而是隐藏在激光点中的曲面;
- 3、最好的误差尺度为当前的激光点到实际曲面的距离,关键的问题在于如何恢复曲面;
- 4、PL-ICP的解答思路:用分段线性的方法来对实际曲面进行近似,从而定义当前帧激光点到曲面的距离;
– 4.2.2 数学描述:
- 目标函数:表示点到曲面的距离,即点到直线的距离

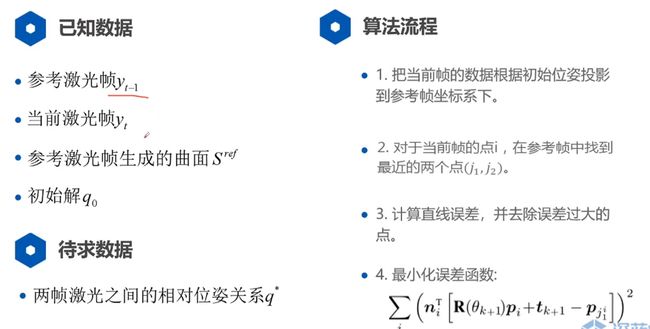
– 4.2.3 求解方法:
- 流程:
1、把当前帧的数据根据初始位姿投影到参考帧坐标系下;
2、对于当前帧的点i,在参考帧中找到最近的两个点(j1,j2)****,因为两点确定一线。
3、计算直线误差,并去除误差过大的点。
4、代入最小化误差函数求解,点到直线的误差。
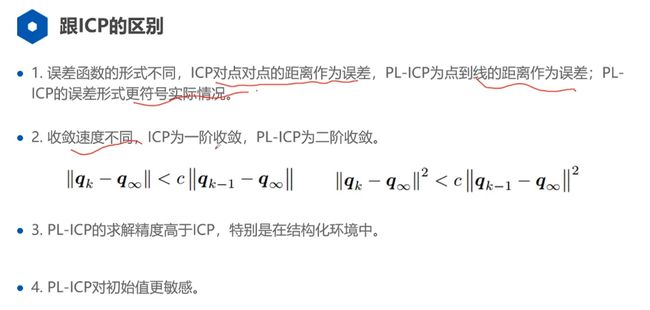
– 4.2.4 PL-ICP和ICP的区别
4.3 NICP匹配方法
- **N:normal **法向量
简介:原始的论文是运行在3D激光中的,不过变到2D是很容易的。
目前在开源领域最好的ICP方法;
– 4.3.1 基本思路:
1、替换了pp-icp的欧式最近距离特征。
2、充分利用曲面的特征来对错误的点匹配进行滤除,主要的特征为法向量和曲率。
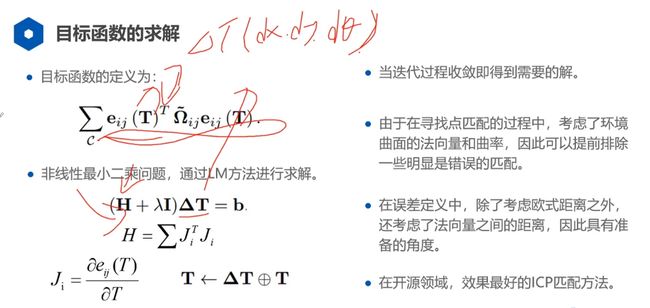
3、误差项除了考虑对应点的欧式距离之外,同时还考虑对应点法向量的角度差。(有利于R旋转矩阵的求解,精度更高**;R比t的精度要求高**)

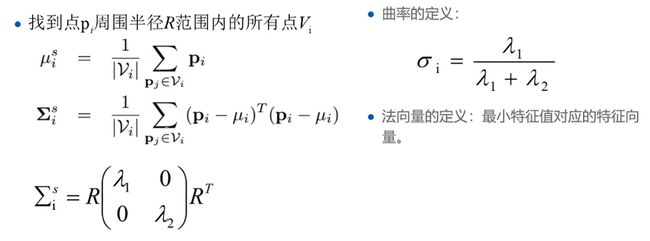
– 4.3.2 数学描述

– 4.3.3 法向量和曲率计算
高斯分布,描述点云的空间分布特性,即usi;
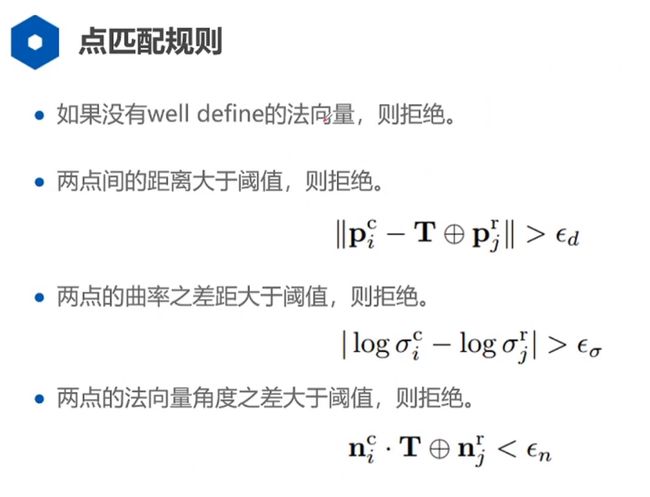
– 4.3.4 点匹配规则:
1、杂点不匹配
J的求解,泰勒展开;LM迭代求解收敛。
– 4.3.5 算法流程:

4.4 IMLS-ICP匹配方法
- IMLS:隐式的移动最小二乘;
- Implicit 隐式,由于实际的曲面的显式方程难以求出,实际是求点到曲线的距离,拟合一曲面。
- Moving 滑动窗口法:
- Least Square 最小二乘法求解;
理论上最好的算法,因为对实际环境的拟合是最真实的,精度最高。
目前没有开源的slam的ros算法包;
曲面重建约准确,对真实世界描述约准确,匹配的精度就越高。
步骤:
1、选取参考点;
2、曲面重构;
– 4.4.1 ICP和IMLS的对比:
1、ICP收敛到了一团点上,收敛结果不稳定;
2、IMLS-ICP收敛到了曲线上,符合真实情况,拟合结果稳定,误差尺度更好;
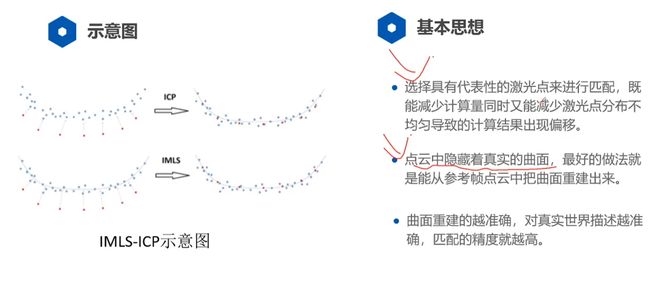
基本思想解释:
1、选择代表性点:选择信息量丰富的点,结构化的点。去除不好的杂点,因为激光常常会出现点分布不均匀的情况,可能会让最终匹配结果偏向特征点丰富的一边,令匹配失真;
– 4.4.2 代表点的选择策略:
- 2D激光:选择直线;
- 3D激光:选择平面;

解释:
1、选择结构化的点,具有良好的曲率和法向量,选择均衡,在曲面两侧数量基本平衡
2、角度不可观一般遇不到,除非是一个非常圆的环境,没有别的特征,难以分辨方位。
– 4.4.3 曲面重建方法

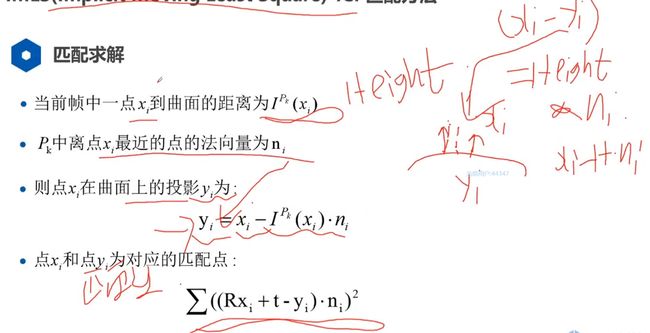
– 4.4.4 匹配求解
- 计算步骤:
- 当前帧中的一点xi到曲面的距离
 ;
; - Pk中离点xi最近的点的法向量为ni;
- 则点xi在曲面上的投影yi为:yi=xi-Ipk(xi)*ni
- 点xi和点yi为对应的匹配点:
- 当前帧中的一点xi到曲面的距离
基于优化的方法
– 第五章 激光前端配准算法(基于优化/势场方法)
以下为基于势场的方法,与ICP算法不一样,以下算法都不需要匹配点;简单来说就是对某段连续的激光点(障碍物)进行高斯平滑/膨胀,再用分数评价,离激光点(障碍物)越近,得分越高(障碍物本身得分为零),人为地构造出一个得分势场; 这样只要比较得分即可,不需要匹配点。
- 基本数学概念:
a.梯度gradient,由多元函数的各个偏导数组成的向量
以二元函数为例,其梯度为:

b.黑森矩阵Hessian matrix,由多元函数的二阶偏导数组成的方阵,描述函数的局部曲率,以二元函数为例。可用迭代法求解,地址

c.雅可比矩阵 Jacobian matrix,是多元函数一阶偏导数以一定方式排列成的矩阵,体现了一个可微方程与给出点的最优线性逼近。以二元函数为例,
如果扩展多维的话F: Rn-> Rm,则雅可比矩阵是一个m行n列的矩阵:
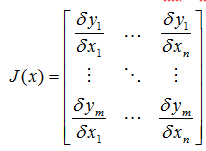
雅可比矩阵作用:如果P是Rn中的一点,F在P点可微分,那么在这一点的导数由JF§给出,在此情况下,由F§描述的线性算子即接近点P的F的最优线性逼近:
![]()
d.残差 residual,表示实际观测值与估计值(拟合值)之间的差值
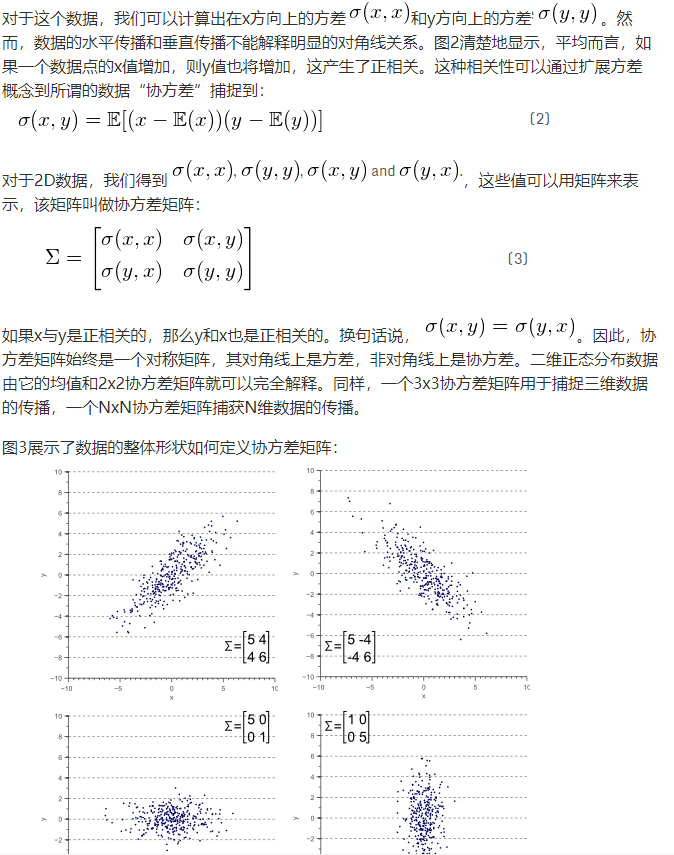
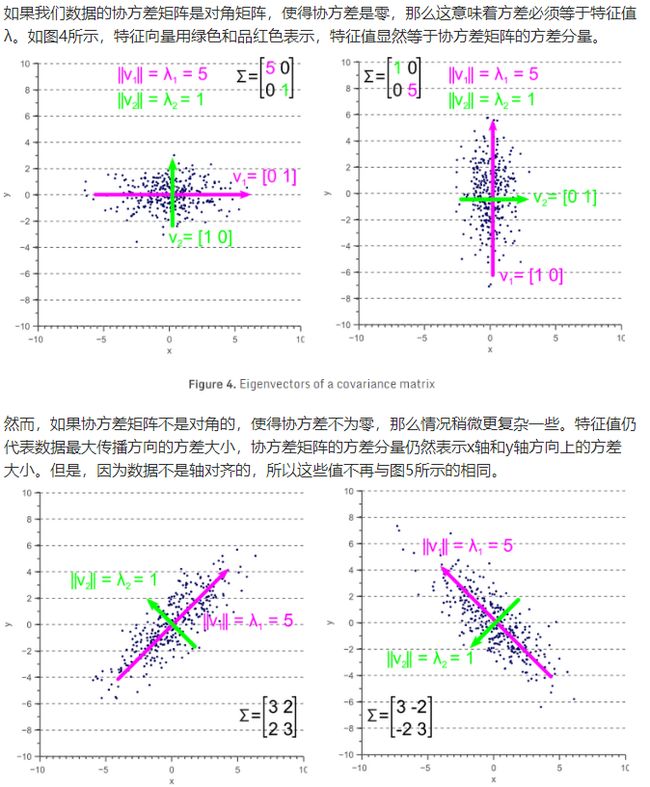
e. 协方差矩阵
资料:
http://www.360doc.com/content/16/0121/13/13800296_529534763.shtml
协方差矩阵始终是一个对称矩阵,其对角线是方差,非对角线是协方差;
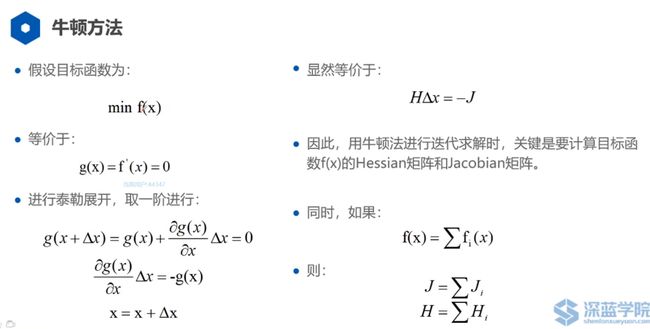
5.1高斯牛顿优化方法
例如:hector-slam。
算法解析:https://blog.csdn.net/qq_39521554/article/details/79919041
** 高斯牛顿法解决非线性最小二乘问题的最基本方法,并且它只能处理****二次函数**
– 5.1.1 原理图示及数学描述
描述:此图表示红色最高点为选取的初始值,取不同的初始解,会得到不一样的结果。(非凸优化、初始值敏感)。下图就是人工势场。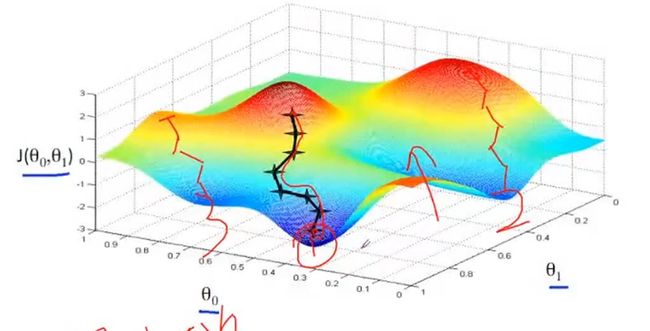
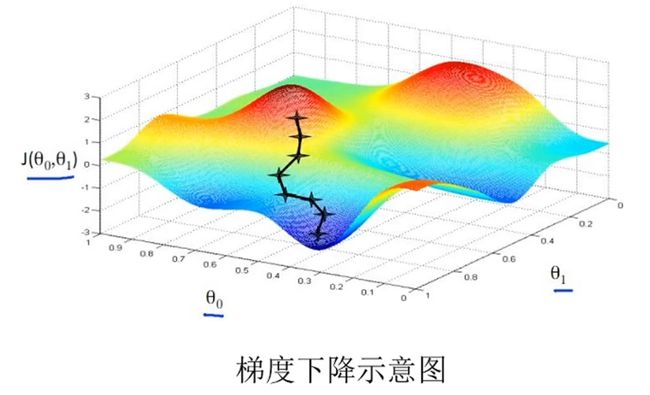
给定目标函数E(T):

- 上图公式:
1、目标是求T(机器人位姿)的极小值;
2、[1-M(Si(T))]²,表示势场(其中Si表示得分,M(x)表示得到坐标X的地图占用概率),即表示在障碍物周围一定区域内,得分表示为1,超过区域表示为0,这就有了一个人工势场( [0, 1]闭区间 )。
3、生成T的坐标矩阵,将T全部转换到三维空间中。
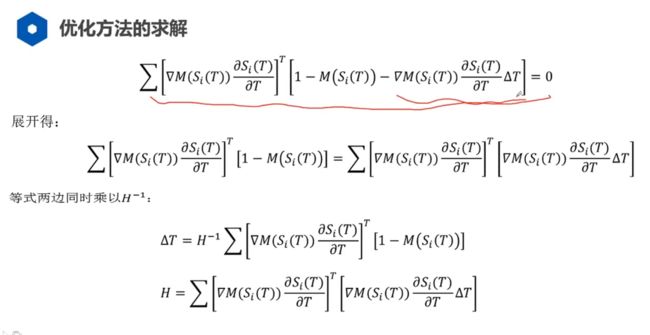
– 5.1.2 求解方法步骤
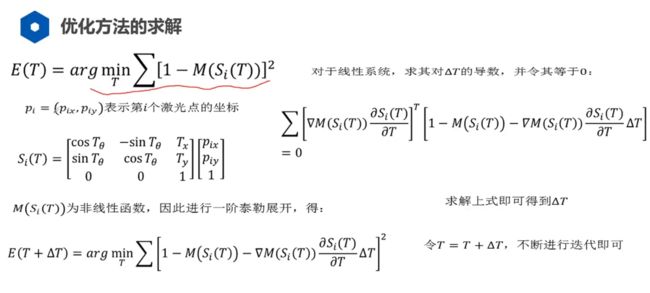
- pi表示当前激光帧的第i个激光点参考坐标/势场坐标;
- M(Si(T))为非线性函数;一阶泰勒展开得线性函数,化简
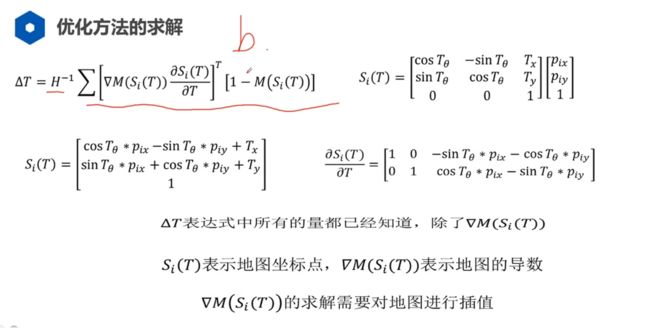
- M(Si(T))是离散的,无法求导,故需要插值。
- 地图的插值方法:
1、地图双线性插值


如上图,Pm为激光点,已知Pij四点栅格值,且知道其各自的势场值,就可用双线性插值方法推出Pm的势场值;
- 拉格朗日插值法
一般来说多项式插值就是求n-1个线性方程的解,拉格朗日插值即是基于此思想。拉格朗日创造性的避开的方程组求解的复杂性,引入“基函数”这一概念,使得快速手工求解成为可能。
定义:求作<=n 次多项式 pn(x),使满足条件pn(xi)= yi,i = 0,1,…,n.这就是所谓拉格朗日( Lagrange)插值;

5.2 NDT方法
主要用在3D-slam算法当中。
- 比较好的NDT解析:https://www.cnblogs.com/21207-iHome/p/8039741.html
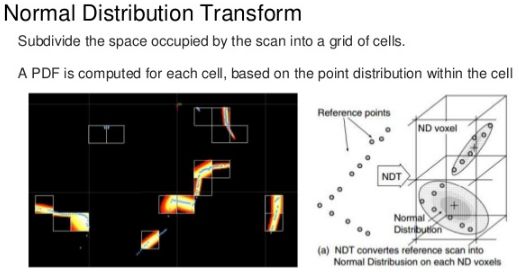
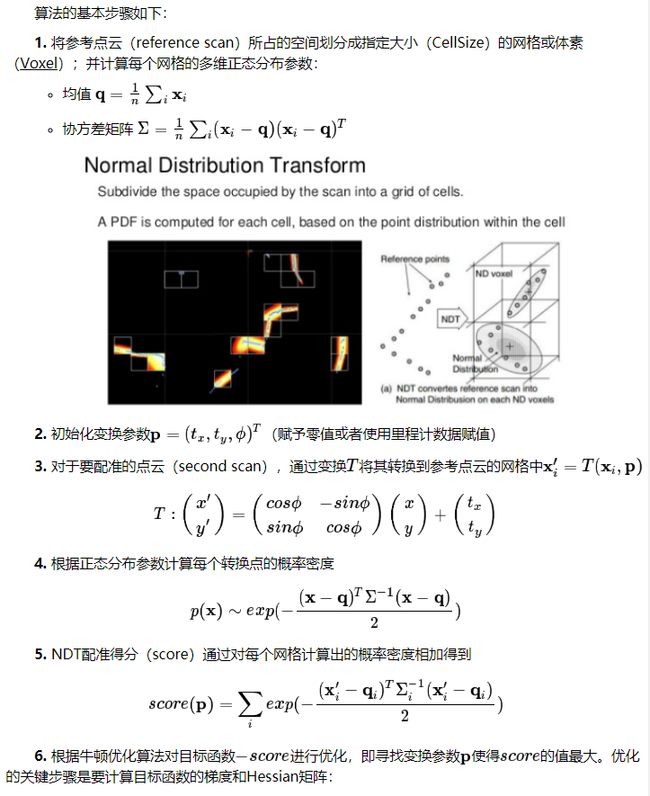
– 5.2.1 基本思想
NDT算法的基本思想是先根据参考数据(reference scan)来构建多维变量的正态分布,如果变换参数能使得两幅激光数据匹配的很好,那么变换点在参考系中的概率密度将会很大。因此,可以考虑用优化的方法求出使得概率密度之和最大的变换参数,此时两幅激光点云数据将匹配的最好。
Normal Distance Transform 正态分布变换;

1、把空间用cel进行区分
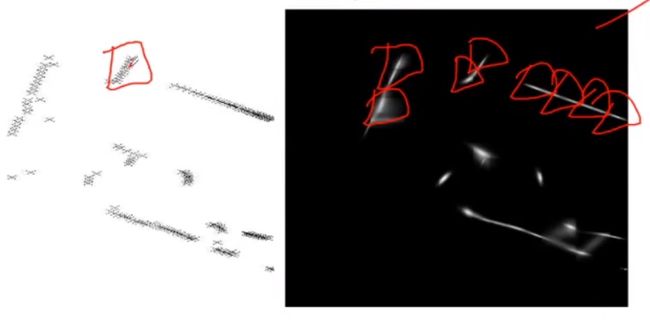
2、用高斯分布区代替势场,膨胀为符合正态分布的概率密度区域,形成一个天然分段连续的势场:
把落入cell的点都认为符合拟合的高斯分布。
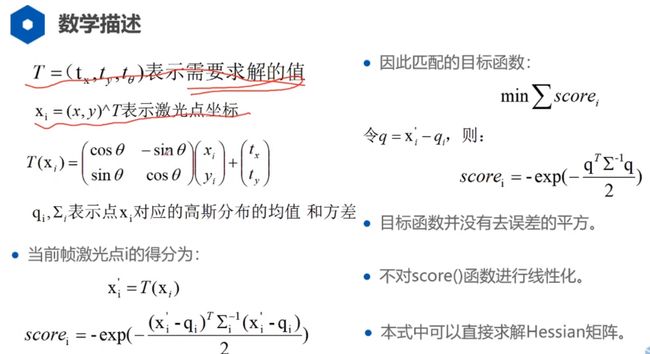
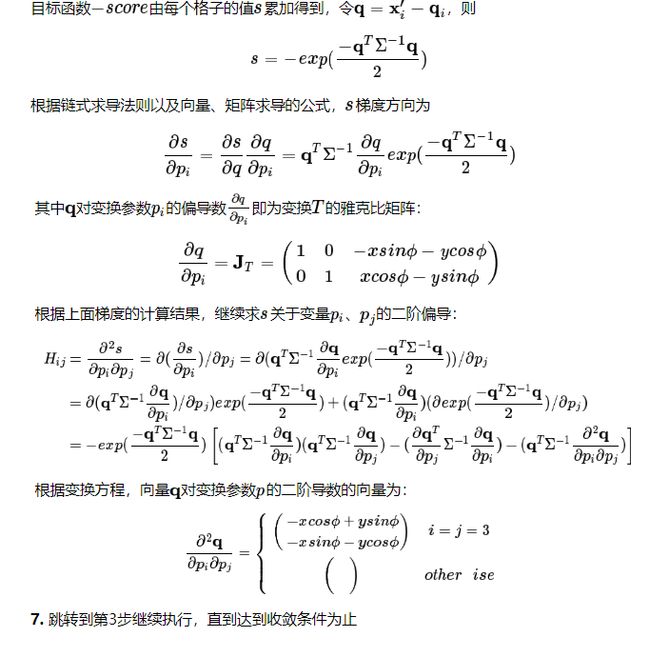
– 5.2.2 数学描述

– 5.2.3 算法流程

NDT算法的C++实现:
https://blog.csdn.net/adamshan/article/details/79230612
5.3 相关匹配方法及分支定界加速
CSM、BB
例如:cartographer。
CSM作用:先用相关性扫描匹配(CSM)给一个初值,然后构造一个最小二乘问题;用激光末端点匹配取到占据栅格地图中的值,获得得分,取得分最高的作为初值。加上多分辨率计算可以加速,并且获得分辨率意义下的最优解。
相关性扫描匹配的思路其实非常简单。想象给定一个栅格地图,再给定当前帧的点云,怎样才能知道激光雷达所在的位置呢?最简单的办法,**把激光雷达放在地图的每个格子上,看在这个位置时,**点云是否与地图重合,重合程度最高的位置就是激光雷达的真实位姿。
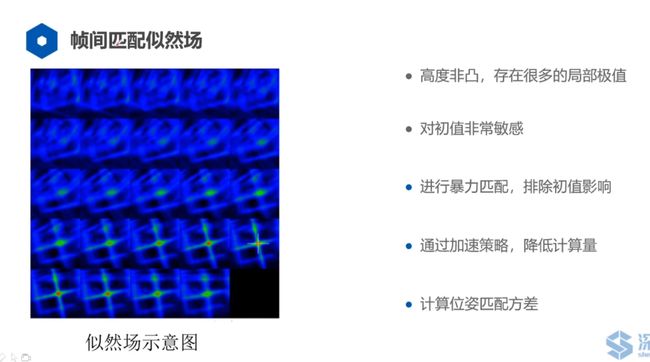
- 基本概念
枚举似然场中的每一个位姿,选择最好的。
– 5.3.1 算法流程
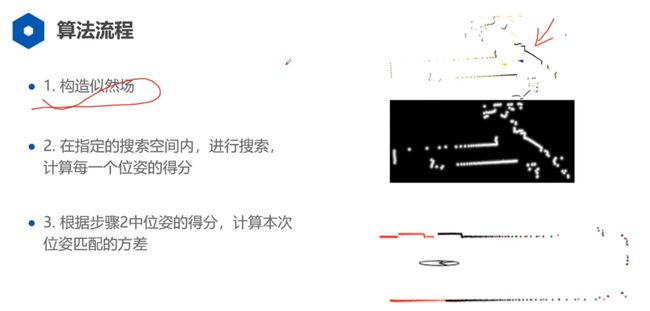
1、构造似然场,即对其进行高斯模糊;
2、指定一个小车的位姿范围,例如1m x 1m,30度范围内,分成许多位姿,计算每一个位姿的得分,取最优解。
3、位姿搜索
- 位姿搜索

1、暴力搜索
三层嵌套for循环,大量三角函数计算。
2、预先投影搜索
把1的顺序调转。
3、多分辨率搜索
因为25cm和2.5cm的差距,保证不了最优位姿在栅格内,所以有时候会得到一个次优解。分支定界可能最优。
5.4 分支定界算法
– 5.4.1 基本思想
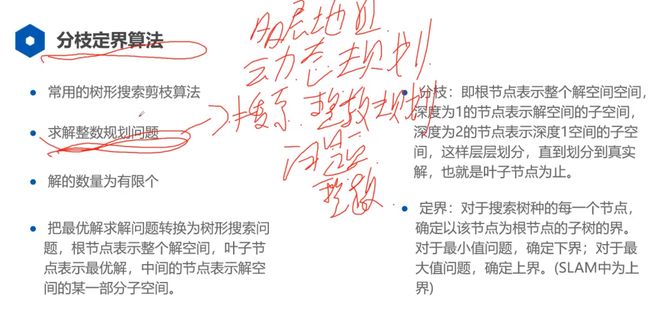
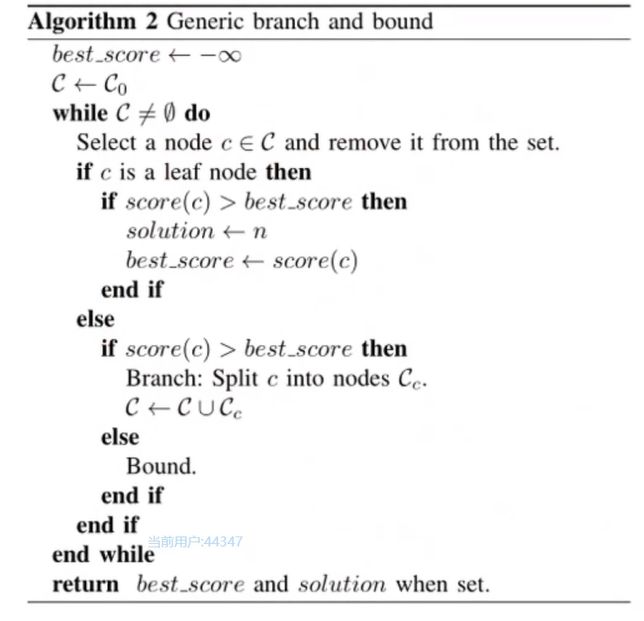
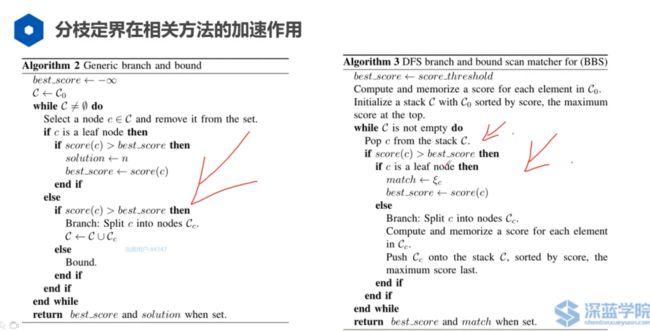
– 5.4.2 分支定界的加速作用

补充
相关性扫描匹配CSM与分支限界加速:
https://blog.csdn.net/weixin_35695879/article/details/103511418
Google Cartographer SLAM 原理 (Real-Time Loop Closure in 2D LIDAR SLAM 论文详细解读):
https://blog.csdn.net/weixin_36976685/article/details/84994701
前言
在激光SLAM中,相关性扫描匹配可是重点中的重点,而分支限界加速更是大大提高了它的实时性。本文就来详细解读一下其中的奥秘。
激光SLAM前端
既然是SLAM,那么通常都会分为前端和后端。前端充当里程计的角色,比如我们熟知的VO(视觉里程计)和VIO(视觉惯性里程计)。激光SLAM也需要前端,对于每一帧点云,通常是使用所谓的扫描匹配(scan-match)方法进行位姿估计。
简单地说,扫描匹配就是想办法把两帧点云对齐,对齐过程中的旋转和平移就是两帧之间的相对位姿。这是最最简单的方式,实际中,为了提高鲁棒性,通常把当前帧点云和地图进行扫描匹配,更不容易出错。
扫描匹配的实现方式有两种,第一种是相关性扫描匹配,第二种是基于优化的扫描匹配。第一种思路简单,但有一些复杂的细节,而第二种则是构建非线性最小二乘优化问题并求解。实际中,通常是两种方法同时用,先用相关性扫描匹配求初值,再用基于优化的扫描匹配进一步优化。
相关性扫描匹配
相关性扫描匹配的思路其实非常简单。想象给定一个栅格地图,再给定当前帧的点云,怎样才能知道激光雷达所在的位置呢?最简单的办法,把激光雷达放在地图的每个格子上,看在这个位置时,点云是否与地图重合,重合程度最高的位置就是激光雷达的真实位姿。
显然,这个方法就是暴力搜索。虽然肯定搜得出来,但速度比较慢。想要加速,就得祭出我们的算法神器了——分支限界。
分支限界加速
如果上过计算机算法课,就一定接触过分支限界法。这是一个通用的算法,一般用于搜索离散空间的最优解。我们这里的解空间显然就是一个离散的空间,而且可以很方便地按照地图分辨率构造树形结构。
举例来说,假设有一张4×4的地图,我们降低其分辨率,每2×2的格子合并成一个,得到一张2×2的地图,再降低其分辨率,得到一张1×1的地图。这样,地图被分成了三层,如下图所示。
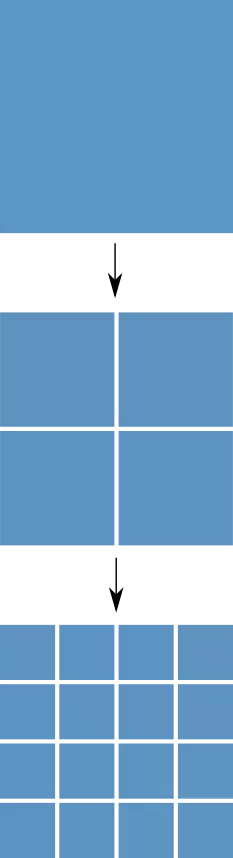
有了多分辨率地图后,我们先在第二层的解空间中搜索,找到最优的位姿对应的格子。然后再在该格子中搜索下一层中对应的小格子,找到最优的位姿。
这么简单?当然不是。请注意,上面的做法是完全错误的。它有两个问题。首先,在第二层的格子中搜索最优的位姿,实际上是把位姿放在格子的中心,计算其点云的评分(即hit点的评分之和,下文直接称其为位姿的评分)。但是格子中心的位姿并不能代表格子其它位置的位姿,很有可能格子中心的评分低于其它位置的评分,那么第二层最优的格子中并不一定包含第三层最优的格子。怎么办呢,我们可以想办法让格子中心的评分高于其所有子格子的评分,此时格子的评分是其子格子的评分上界,这样就可以保证子格子的最高评分体现在父格子中。
但是,此时又引入了第二个问题,虽然格子的评分是其子格子的评分上界,但并非上确界。也就是说,可能存在格子的评分很高,但其所有子格子的评分都很低的情况。这样的话,我们仍然无法选取最大评分格子的同时抛弃其它格子。
剩下的选择就只有一个,绝不抛弃任何一个可能存在最优解的格子,只抛弃那些绝对不存在最优解的格子。这正是分支限界的思想。
具体实现的时候,先从根节点开始遍历,把它拆分成4个子格子。这4个子格子分别计算评分,并由高到低排序。从中选出分数最高的格子,进一步拆分成4个子格子。假设这4个子格子已经到了叶子节点,也就是达到了真实地图的分辨率。此时计算出的4个子格子的评分代表了真实的位姿评分(只有叶子节点的评分是真实评分,其它格子的评分都是上界),找出其最大值,记作best_score。以上过程,我们体会了分支是如何实现的。接下来,该轮到限界出场了。第二层的格子还有3个未曾探索,我们当然是选择最大的那个开始分支。但别急,先看一下它的评分是否大于best_score,如果是,继续分支,如果否,就可以直接剪枝了,抛弃这个格子及其所有子格子。因为格子的评分代表了其子格子评分的上界,如果上界都小于best_score,就不可能再有子格子的评分大于它了。按照如此方法,大刀阔斧地剪枝即可。注意,当遇到评分大于best_score的叶子节点时,记得更新best_score,这样可以更快地缩小搜索空间。
讲到这里,你是不是有点摸不着头脑?别怕,因为这里有个最最关键的问题我还没有解释,也就是如何能够快速计算出格子评分的上界。
计算评分上界
先说一个平凡方法。既然要算子格子评分的上界,那就把每一个子格子拿出来算一遍,求个最大值。对了,子格子还会有子格子,所以这是个递归运算,直到把叶子节点都算出来才行。那这跟直接暴力搜索就没什么两样了,不行不行。
我们还是得追求在O(1)时间复杂度内求出格子的评分。想了想,之所以叶子节点评分可以在O(1)时间内求出,是因为它是直接在地图中查表得到的(严谨地说,是通过查其所有hit点的评分再求和得到的,但由于hit点数量固定,可以认为时间复杂度是O(1))。但我们构造的多分辨率地图能不能也维护类似的概率表格,使得格子的评分可以在对应分辨率地图中查询得到呢?
多么机智的想法啊!试想,把地图中每个格子的概率用其附近区域内的最大概率代替。这样的话,直接查对应分辨率地图就可以得到格子的评分,因为这个评分已经事先在附近区域中取了最大值。
上面提到的“某个范围”,需要与地图分辨率保持一致。也就是说,越低分辨率的地图(也就是越高层的地图),应该在越大的区域求最大值,其大小与当前分辨率下格子的大小一致。
不同分辨率的地图需要事先计算好,大概长这个样子:

可以看到,越靠后的地图分辨率越低,格子中的概率越接近1,也就代表了越高的上限。这与我们的直观理解是一致的。
总结
说实话,本文内容非常抽象,又限于笔者画图能力太差,实在画不出合适的插图,只能靠读者自己想象了。
不得不说,除非事先有所了解,否则读了之后可能还是一头雾水。所以,如果你对激光SLAM还没有整体的了解,还不知道什么是点云、什么是地图、如何计算概率。那么请关注一下文末的参考资料,相信会对你有所帮助。
相关性扫描匹配及分枝限界加速在谷歌Cartographer的论文中有详细介绍,建议大家去看一看。
参考资料
Real-Time Loop Closure in 2D LIDAR SLAM Wolfgang Hess, Damon Kohler, Holger Rapp, Daniel Andor