《视觉SLAM十四讲》第十章g2o代码的简化
在学习SLAM过程中,第十章的解决大规模BA问题的g2o代码比较难读懂,不太适合我这种slam小白,于是我写了一个简化的版本,不过基本是参考书上的代码写的,尽最大的可能写的简单一些,同时也是在学习g2o的用法。数据集可以在这里下载:http://grail.cs.washington.edu/projects/bal/
文件会出现这种格式:
前三行为旋转向量,四五六行为平移向量,剩下为f , k1 , k2
1.5741515942940262e-02
-1.2790936163850642e-02
-4.4008498081980789e-03
-3.4093839577186584e-02
-1.0751387104921525e-01
1.1202240291236032e+00
3.9975152639358436e+02
-3.1770643852803579e-07
5.8820490534594022e-13 代码附上:
#include
#include
#include
#include
#include
#include
#include "g2o/core/base_vertex.h"
#include "g2o/core/base_binary_edge.h"
#include "g2o/stuff/sampler.h"
#include "g2o/core/sparse_optimizer.h"
#include "g2o/core/block_solver.h"
#include "g2o/core/solver.h"
#include "g2o/core/robust_kernel_impl.h"
#include "g2o/core/batch_stats.h"
#include "g2o/core/optimization_algorithm_levenberg.h"
#include "g2o/core/optimization_algorithm_dogleg.h"
#include "g2o/solvers/cholmod/linear_solver_cholmod.h"
#include "g2o/solvers/dense/linear_solver_dense.h"
#include "g2o/solvers/eigen/linear_solver_eigen.h"
#include "g2o/solvers/pcg/linear_solver_pcg.h"
#include "g2o/types/sba/types_six_dof_expmap.h"
#include "g2o/solvers/structure_only/structure_only_solver.h"
#include
using namespace Eigen;
using namespace std;
using namespace cv;
using Sophus::SE3;
using Sophus::SO3;
//定义求解器 pose:九维 路标点:三维
typedef g2o::BlockSolver > BalBlockSolver;
typedef Eigen::Matrix< double, 9, 1 > Vector9d;
void World2Camera(const Vector9d camera, const Eigen::Vector3d P_w, Eigen::Vector3d& P_c);
void SolveBALProblem(const string filename);
inline void CamProjectionWithDistortion(const Vector9d camera, const Vector3d point, Vector2d& u);
//BAL相机顶点
class VertexCameraBAL : public g2o::BaseVertex<9,Vector9d>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
VertexCameraBAL() {}
virtual void setToOriginImpl() {}
virtual void oplusImpl ( const double* update )
{
Vector9d::ConstMapType v ( update );
_estimate += v;
}
virtual bool read ( std::istream& in ) { return false;}
virtual bool write ( std::ostream& out ) const {return false;}
};
//BAL 空间点顶点
class VertexPointBAL : public g2o::BaseVertex<3, Eigen::Vector3d>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
VertexPointBAL() {}
virtual void setToOriginImpl() {}
virtual void oplusImpl ( const double* update )
{
Eigen::Vector3d::ConstMapType v ( update );
_estimate += v;
}
virtual bool read ( std::istream& in ) { return false;}
virtual bool write ( std::ostream& out ) const {return false;}
};
//BAL 边
class EdgeObservationBAL : public g2o::BaseBinaryEdge<2, Eigen::Vector2d,VertexCameraBAL, VertexPointBAL>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
EdgeObservationBAL() {}
virtual bool read ( std::istream& in ) {return false;}
virtual bool write ( std::ostream& out ) const {return false;}
//使用G20数值导,不像书上调用ceres的自动求导功能.
virtual void computeError() override
{
//这里将第0个顶点,相机位姿取出来。
const VertexCameraBAL* cam = static_cast ( vertex ( 0 ) );
//这里将第1个顶点,空间点位置取出来。
const VertexPointBAL* point = static_cast ( vertex ( 1 ) );
Eigen::Vector2d u;
CamProjectionWithDistortion(cam->estimate(), point->estimate(), u );
_error[0] = u[0] - _measurement[0];
_error[1] = u[1] - _measurement[1];
}
};
//加载BAL的文本文件
class LoadBALProblem
{
public:
LoadBALProblem( string filename ):filename_(filename) {}
~LoadBALProblem()
{
delete[] point_index_;
delete[] camera_index_;
delete[] observations_;
delete[] observations_cameras;
delete[] observations_points;
}
//返回相机数量,空间点数量,观测点数量
int num_cameras() const{ return num_cameras_; }
int num_points() const{ return num_points_; }
int num_observations() const{ return num_observations_;}
double num_observations_cameras(int index) { return observations_cameras[index];}
double num_observations_points(int index) { return observations_points[index];}
double num_observations_uv(int index) { return observations_[index];}
int point_index(int index) { return point_index_[index];}
int camera_index(int index) { return camera_index_[index];}
//读取数据
void ReadData();
//将pose和point生成点云.
void WriteToPLYFile(const std::string& filename);
//当优化完成,重新将数据写入数组,覆盖原来未被优化的数据
double* ReWritePoses(){return observations_cameras;}
double* ReWritePoints(){return observations_points;}
//坐标系操作,相机坐标转换到世界坐标
void Camera2World(const cv::Mat angleAxis, const Eigen::Vector3d P_c, Eigen::Vector3d& P_w);
private:
int num_cameras_;
int num_points_;
int num_observations_;
int observations_cameras_;
int observations_points_;
string filename_;
int* point_index_;
int* camera_index_;
double* observations_;
double* observations_cameras;
double* observations_points;
};
int main(int argc, char** argv)
{
const string filename = "../problem-16-22106-pre.txt";
//const string filename = "../problem-52-64053-pre.txt";
SolveBALProblem(filename);
return 0;
}
/***
* 解决BAL问题
* @param filename 将.txt文件传进来,最后将优化的后点云输出
*/
void SolveBALProblem(const string filename)
{
//生成初始数据
LoadBALProblem loadBALProblem(filename);
loadBALProblem.ReadData();
//生成初始为未被优化的ply点云文件
loadBALProblem.WriteToPLYFile("../old.ply");
//创建一个稀疏优化器对象
g2o::SparseOptimizer optimizer;
//使用稀疏求解器
g2o::LinearSolver* linearSolver =
new g2o::LinearSolverCholmod();
dynamic_cast* >(linearSolver)->setBlockOrdering(true);
//矩阵块求解器
BalBlockSolver* solver_ptr = new BalBlockSolver(linearSolver);
//使用LM算法
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg(solver_ptr);
//优化器构建完成
optimizer.setAlgorithm(solver);
//打开调试输出
optimizer.setVerbose(true);
//增加pose顶点
const int num_cam = loadBALProblem.num_cameras();
for(int i = 0; i < num_cam; i++)
{
Vector9d temVecCamera;
for (int j = 0; j < 9; j++)
{
temVecCamera[j] = loadBALProblem.num_observations_cameras(9*i+j);
}
VertexCameraBAL* pCamera = new VertexCameraBAL();
pCamera->setEstimate(temVecCamera);
pCamera->setId(i);
optimizer.addVertex(pCamera);
}
//增加路标顶点
const int point_num = loadBALProblem.num_points();
for(int i = 0; i < point_num; i++)
{
Vector3d temVecPoint;
for (int j = 0; j < 3; j++)
{
temVecPoint[j] = loadBALProblem.num_observations_points(3*i+j);
}
VertexPointBAL* pPoint = new VertexPointBAL();
pPoint->setEstimate(temVecPoint);
//这里加上pose的数量,避免跟pose的ID重复
pPoint->setId(i + num_cam);
pPoint->setMarginalized(true);
optimizer.addVertex(pPoint);
}
//增加边
const int num_observations =loadBALProblem.num_observations();
for(int i = 0; i < num_observations; ++i)
{
EdgeObservationBAL* bal_edge = new EdgeObservationBAL();
//得到相机ID和空间点ID
const int camera_id = loadBALProblem.camera_index(i);
const int point_id = loadBALProblem.point_index(i) + num_cam;
//使用了鲁棒核函数
g2o::RobustKernelHuber* rk = new g2o::RobustKernelHuber;
rk->setDelta(1.0);
bal_edge->setRobustKernel(rk);
bal_edge->setVertex(0,dynamic_cast(optimizer.vertex(camera_id)));
bal_edge->setVertex(1,dynamic_cast(optimizer.vertex(point_id)));
bal_edge->setInformation(Eigen::Matrix2d::Identity());
bal_edge->setMeasurement(Eigen::Vector2d(loadBALProblem.num_observations_uv(2*i + 0),
loadBALProblem.num_observations_uv(2*i + 1)));
optimizer.addEdge(bal_edge);
}
optimizer.initializeOptimization();
optimizer.setVerbose(true);
optimizer.optimize(20);
double* cameras = loadBALProblem.ReWritePoses();
for(int i = 0; i < num_cam; i++)
{
VertexCameraBAL* pCamera = dynamic_cast(optimizer.vertex(i));
Vector9d NewCameraVec = pCamera->estimate();
memcpy(cameras + i * 9, NewCameraVec.data(), sizeof(double) * 9);
}
double* points = loadBALProblem.ReWritePoints();
for(int j = 0; j < point_num; j++)
{
VertexPointBAL* pPoint = dynamic_cast(optimizer.vertex(j + num_cam));
Eigen::Vector3d NewPointVec = pPoint->estimate();
memcpy(points + j * 3, NewPointVec.data(), sizeof(double) * 3);
}
loadBALProblem.WriteToPLYFile("../new.ply");
cout<<"finished..." <(1,3)<(0,0),Rcw.at(0,1),Rcw.at(0,2), camera[3],
Rcw.at(1,0),Rcw.at(1,1),Rcw.at(1,2), camera[4],
Rcw.at(2,0),Rcw.at(2,1),Rcw.at(2,2), camera[5],
0,0,0,1;
//这里的非齐次坐标的变换要注意
Vector4d Pw(P_w[0],P_w[1],P_w[2],1);
Vector4d P = T*Pw;
P_c[0] = P[0];
P_c[1] = P[1];
P_c[2] = P[2];
}
/***
* 去畸变,世界坐标下的空间点转换成相机坐标系下的空间,最后变成像素坐标的像素点,基本跟书上的一致
* 思想如下:
* P = R * X + t (conversion from world to camera coordinates)
* p = -P / P.z (perspective division) 这里有个负号需要注意
* p' = f * r(p) * p (conversion to pixel coordinates)
* r(p) = 1.0 + k1 * ||p||^2 + k2 * ||p||^4.
* @param camera 相机的9的数据,实际上只用到前面6个数据
* @param point 世界坐标系下的空间点
* @param u 像素坐标的像素点
*/
inline void CamProjectionWithDistortion(const Vector9d camera, const Vector3d point, Vector2d& u)
{
Eigen::Vector3d p;
World2Camera(camera, point, p);
// Compute the center fo distortion
double xp = -p[0]/p[2];
double yp = -p[1]/p[2];
// Apply second and fourth order radial distortion
const double k1 = camera[7];
const double k2 = camera[8];
double r2 = xp*xp + yp*yp;
double distortion = 1.0 + r2 * k1 + k2*r2*r2 ;
const double f = camera[6];
u[0] = f * distortion * xp;
u[1] = f * distortion * yp;
}
/***
* 实现将pose转换到世界坐标系
* @param angleAxis 旋转向量
* @param P_c pose的t
* @param P_w 世界坐标系pose的t
*/
void LoadBALProblem::Camera2World( const cv::Mat angleAxis, const Eigen::Vector3d P_c, Eigen::Vector3d& P_w)
{
cv::Mat Rcw;
//这里调用opencv将旋转向量转换成旋转矩阵的API
cv::Rodrigues(angleAxis,Rcw);
Eigen::Matrix4d Tcw;
Tcw << Rcw.at(0,0),Rcw.at(0,1),Rcw.at(0,2),P_c[0],
Rcw.at(1,0),Rcw.at(1,1),Rcw.at(1,2),P_c[1],
Rcw.at(2,0),Rcw.at(2,1),Rcw.at(2,2),P_c[2],
0,0,0,1;
Eigen::Matrix4d Twc;
//Twc = Tcw^-1
Twc = Tcw.inverse();
P_w[0] = Twc(0,3);
P_w[1] = Twc(1,3);
P_w[2] = Twc(2,3);
}
/***
*生成点云文件,基本跟书上一样
* @param filename
*/
void LoadBALProblem::WriteToPLYFile(const std::string& filename)
{
std::ofstream of(filename.c_str());
of<< "ply"
<< '\n' << "format ascii 1.0"
<< '\n' << "element vertex " << num_cameras_ + num_points_
<< '\n' << "property float x"
<< '\n' << "property float y"
<< '\n' << "property float z"
<< '\n' << "property uchar red"
<< '\n' << "property uchar green"
<< '\n' << "property uchar blue"
<< '\n' << "end_header" << std::endl;
for(int i = 0; i < num_cameras(); ++i)
{
Eigen::Vector3d P_c;
Eigen::Vector3d P_w;
cv::Mat angleAxis = (cv::Mat_(1,3)<>num_cameras_;
fin>>num_points_;
fin>>num_observations_;
//输出第一行数据,这里包括,相机的姿态数量,空间点的数量,观测数据数量
std::cout << "pose number: " << num_cameras_ <>camera_index_[i];
fin>>point_index_[i];
fin>>observations_[2*i];
fin>>observations_[2*i+1];
}
//这里读取本文文件里一行一个数字的内容,相机的参数有9个,分别为R,t,f,k1,k2,这个R是旋转向量,空间为三个一组
observations_cameras_ = 9*num_cameras_;
observations_points_ = 3*num_points_;
observations_cameras = new double[observations_cameras_];
observations_points = new double[observations_points_];
//读取相机初始数据
for (int i = 0; i < observations_cameras_; ++i)
{
fin>>observations_cameras[i];
}
//读取空间初始数据
for (int i = 0; i < observations_points_; ++i)
{
fin>>observations_points[i];
}
} CMakeLists文件:
cmake_minimum_required( VERSION 2.8 )
project( BAL )
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-std=c++11 -O3" )
list( APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules )
# 寻找G2O Cholmod eigen3
find_package( G2O REQUIRED )
find_package( Cholmod )
include_directories(
${G2O_INCLUDE_DIRS} ${CHOLMOD_INCLUDE_DIR}
"/usr/include/eigen3"
)
# sophus
find_package( Sophus REQUIRED )
include_directories( ${Sophus_INCLUDE_DIRS} )
#OpenCV
find_package( OpenCV REQUIRED )
include_directories( ${OpenCV_INCLUDE_DIRS} )
add_executable( BAL main.cpp )
target_link_libraries( BAL
g2o_types_slam2d
g2o_types_slam3d
g2o_core
g2o_stuff
g2o_types_sclam2d
${CHOLMOD_LIBRARIES}
${Sophus_LIBRARIES}
${OpenCV_LIBRARIES}
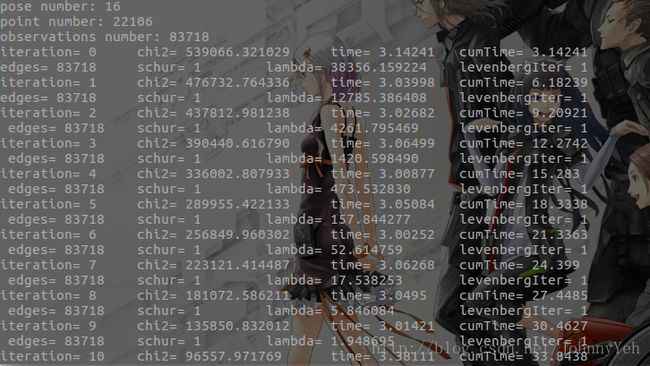
)终端运行效果如下:
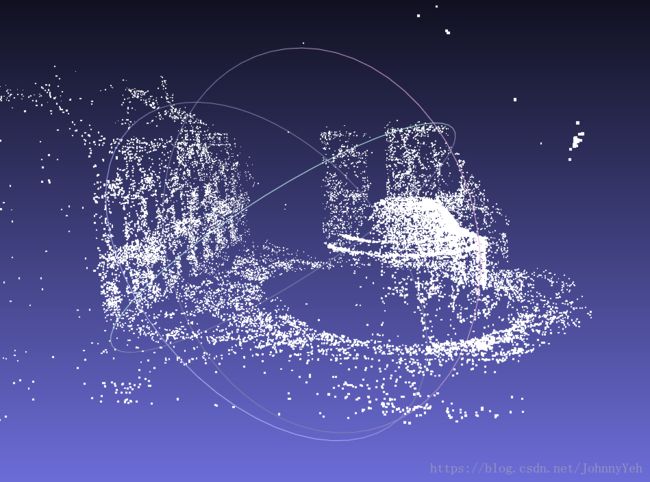
使用meshlab 打开ply文件 命令为meshlab xxx.ply
下一篇博客会实际写出雅克比矩阵,而不是使用g2o帮住求导。
点这里到达下一篇https://blog.csdn.net/JohnnyYeh/article/details/82315543
如果本文有什么错误的地方,请联系我,我及时修改。
转载请注明出处:http://blog.csdn.net/johnnyyeh/article/details/79310655