(单/双目)图像标定全流程(C++/Opencv实现)---代码篇
代码分为几个部分,c++部分使用g++进行编译
(1)双目摄像头标定图像数据集收集保存
//image_save.cpp
#include 显示结果



(2)单目标定
//calibration.cpp
#include 获得的结果


进行双目标定之前,先分别确定左右摄像头的内参和外参。
双目标定
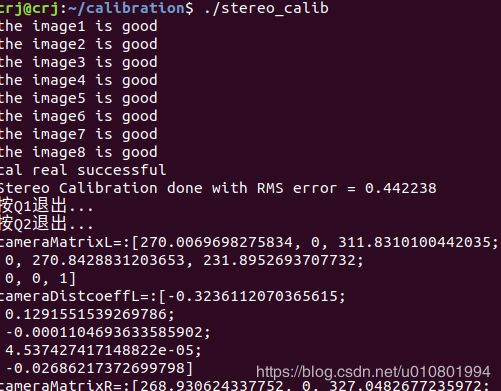
//双目相机标定 stereo_calib.cpp
#include 结果展示:
结果展示:
代码较粗糙,后续会加以修改
参考:
https://blog.csdn.net/xiao__run/article/details/78887362
https://blog.csdn.net/hejingkui/article/details/80488763
应用opencv参考代码的例子 https://blog.csdn.net/a864488081/article/details/78205519