实现自己的仿真小车移动
上一章讲到使用第三方包来实现仿真小车的移动,这一章我们来创建一个自己的仿真小车,并使它在rviz中移动。
我会稍微介绍以下知识
- urdf文件语法
- tf广播与坐标转换
一、urdf语法
有这方面知识的同学可以跳过。
a)什么是urdf?
用于统一机器人描述格式(URDF)的C ++解析器,它是用于表示机器人模型的XML格式。(google翻译)也就是说,如果你想在ros平台中,仿真出来一个机器人,你就需要用这个包来描述一个仿真机器人。
b)urdf的标签
官网上介绍了这几种标签
1. link:描述链接的运动和动态属性。
2. joint:描述接头的运动学和动态特性。
3. gazebo:描述仿真性能,如阻尼,摩擦等。
4. sensor:描述一个传感器,如相机,射线传感器等。
5. model_state:描述某一时间模型的状态。
6. model:描述机器人结构的运动学和动态特性。
7. transmission:传动装置将执行机构连接到接头上,代表其机械联轴器。
8. sensor/proposals:描述一个传感器,如相机,射线传感器等。
我们这次用到的标签是与。
我们这里先给出一个模型,这是官网写好的。
<robot name="visual">
<material name="blue">
<color rgba="0 0 0.8 1"/>
material>
<material name="black">
<color rgba="0 0 0 1"/>
material>
<material name="white">
<color rgba="1 1 1 1"/>
material>
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2"/>
geometry>
<material name="blue"/>
visual>
link>
<link name="right_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
visual>
link>
<joint name="base_to_right_leg" type="fixed">
<parent link="base_link"/>
<child link="right_leg"/>
<origin xyz="0 -0.22 0.25"/>
joint>
<link name="right_base">
<visual>
<geometry>
<box size="0.4 0.1 0.1"/>
geometry>
<material name="white"/>
visual>
link>
<joint name="right_base_joint" type="fixed">
<parent link="right_leg"/>
<child link="right_base"/>
<origin xyz="0 0 -0.6"/>
joint>
<link name="right_front_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
geometry>
<material name="black"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
visual>
link>
<joint name="right_front_wheel_joint" type="fixed">
<parent link="right_base"/>
<child link="right_front_wheel"/>
<origin rpy="0 0 0" xyz="0.133333333333 0 -0.085"/>
joint>
<link name="right_back_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
geometry>
<material name="black"/>
visual>
link>
<joint name="right_back_wheel_joint" type="fixed">
<parent link="right_base"/>
<child link="right_back_wheel"/>
<origin rpy="0 0 0" xyz="-0.133333333333 0 -0.085"/>
joint>
<link name="left_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
visual>
link>
<joint name="base_to_left_leg" type="fixed">
<parent link="base_link"/>
<child link="left_leg"/>
<origin xyz="0 0.22 0.25"/>
joint>
<link name="left_base">
<visual>
<geometry>
<box size="0.4 0.1 0.1"/>
geometry>
<material name="white"/>
visual>
link>
<joint name="left_base_joint" type="fixed">
<parent link="left_leg"/>
<child link="left_base"/>
<origin xyz="0 0 -0.6"/>
joint>
<link name="left_front_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
geometry>
<material name="black"/>
visual>
link>
<joint name="left_front_wheel_joint" type="fixed">
<parent link="left_base"/>
<child link="left_front_wheel"/>
<origin rpy="0 0 0" xyz="0.133333333333 0 -0.085"/>
joint>
<link name="left_back_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
geometry>
<material name="black"/>
visual>
link>
<joint name="left_back_wheel_joint" type="fixed">
<parent link="left_base"/>
<child link="left_back_wheel"/>
<origin rpy="0 0 0" xyz="-0.133333333333 0 -0.085"/>
joint>
<joint name="gripper_extension" type="fixed">
<parent link="base_link"/>
<child link="gripper_pole"/>
<origin rpy="0 0 0" xyz="0.19 0 0.2"/>
joint>
<link name="gripper_pole">
<visual>
<geometry>
<cylinder length="0.2" radius="0.01"/>
geometry>
<origin rpy="0 1.57075 0 " xyz="0.1 0 0"/>
visual>
link>
<joint name="left_gripper_joint" type="fixed">
<origin rpy="0 0 0" xyz="0.2 0.01 0"/>
<parent link="gripper_pole"/>
<child link="left_gripper"/>
joint>
<link name="left_gripper">
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/>
geometry>
visual>
link>
<joint name="left_tip_joint" type="fixed">
<parent link="left_gripper"/>
<child link="left_tip"/>
joint>
<link name="left_tip">
<visual>
<origin rpy="0.0 0 0" xyz="0.09137 0.00495 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger_tip.dae"/>
geometry>
visual>
link>
<joint name="right_gripper_joint" type="fixed">
<origin rpy="0 0 0" xyz="0.2 -0.01 0"/>
<parent link="gripper_pole"/>
<child link="right_gripper"/>
joint>
<link name="right_gripper">
<visual>
<origin rpy="-3.1415 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/>
geometry>
visual>
link>
<joint name="right_tip_joint" type="fixed">
<parent link="right_gripper"/>
<child link="right_tip"/>
joint>
<link name="right_tip">
<visual>
<origin rpy="-3.1415 0 0" xyz="0.09137 0.00495 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger_tip.dae"/>
geometry>
visual>
link>
<link name="head">
<visual>
<geometry>
<sphere radius="0.2"/>
geometry>
<material name="white"/>
visual>
link>
<joint name="head_swivel" type="fixed">
<parent link="base_link"/>
<child link="head"/>
<origin xyz="0 0 0.3"/>
joint>
<link name="box">
<visual>
<geometry>
<box size="0.08 0.08 0.08"/>
geometry>
<material name="blue"/>
visual>
link>
<joint name="tobox" type="fixed">
<parent link="head"/>
<child link="box"/>
<origin xyz="0.1814 0 0.1414"/>
joint>
robot>
这个就是官网上写好的,每个人都会有这个模型。就在这个文件夹/opt/ros/kinetic/share/urdf_tutorial/urdf
然后我们可以运行看看roslaunch urdf_tutorial display.launch model:='$(find urdf_tutorial)/urdf/05-visual.urdf'
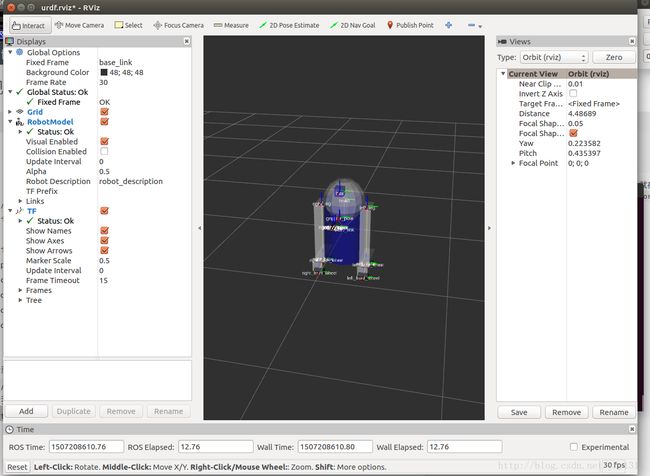
二、tf广播与坐标转换
先来扯一点物理知识。中学物理告诉我们,位移是相对的,你意识到某件物体在移动,那么在你的意识里必定会有一个参考系,物体相对于参考系在移动。在仿真世界中也是这样的,如果你想要小车移动,那么你必须告诉rviz,我们选择一个不动的物体作为参考系,然后小车相对于这个参考系,距离越来越远,这样我们就可以看到小车在仿真世界中移动了!
那么我们只需下面这些步骤:
- 编写监听传感器(我这里用的是手柄)
- 传感器数据使用tf坐标转换,转成tf格式的消息。
- 在rviz中看我们的成果
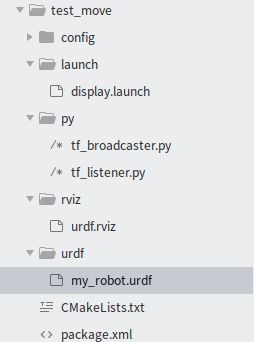
这是我的文档结构,tf_boradcaster.py写的就是监听传感器并使用tf坐标转换
#!/usr/bin/env python
#coding=utf-8
import rospy
import tf
from sensor_msgs.msg import Joy
def handle_turtle_pose(msg):
br = tf.TransformBroadcaster()
br.sendTransform((msg.axes[4], msg.axes[3], 0),
tf.transformations.quaternion_from_euler(0, 0, msg.axes[0]),
rospy.Time.now(),
"odom",#固定坐标叫什么都可以
"base_link")#你的物体的参考系 link标签里面的name属性值都可以
if __name__ == '__main__':
rospy.init_node('my_tf')
rospy.Subscriber('joy',
Joy,#手柄节点的消息类型
handle_turtle_pose)
rospy.spin()因为使用了一些依赖,所以我们在CMakeLists.txt中加载依赖,在CMakeLists.txt文件中找到
find_package(catkin REQUIRED#加上后面的东西,重新catkin_make就行了
rospy
tf
sensor_msgs
)这里把urdf.rviz中的配置发一下,也是直接拿另一个包写好的
Panels:
- Class: rviz/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /Status1
- /RobotModel1
- /TF1
Splitter Ratio: 0.5
Tree Height: 557
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:
- /2D Pose Estimate1
- /2D Nav Goal1
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.588679
- Class: rviz/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
- Class: rviz/Time
Experimental: false
Name: Time
SyncMode: 0
SyncSource: ""
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.03
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 10
Reference Frame: Frame>
Value: true
- Alpha: 0.5
Class: rviz/RobotModel
Collision Enabled: false
Enabled: true
Links:
All Links Enabled: true
Expand Joint Details: false
Expand Link Details: false
Expand Tree: false
Link Tree Style: Links in Alphabetic Order
base_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
right_leg:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
Name: RobotModel
Robot Description: robot_description
TF Prefix: ""
Update Interval: 0
Value: true
Visual Enabled: true
- Class: rviz/TF
Enabled: true
Frame Timeout: 15
Frames:
All Enabled: true
base_link:
Value: true
right_leg:
Value: true
Marker Scale: 0.5
Name: TF
Show Arrows: true
Show Axes: true
Show Names: true
Tree:
base_link:
right_leg:
{}
Update Interval: 0
Value: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Fixed Frame: base_link
Frame Rate: 30
Name: root
Tools:
- Class: rviz/Interact
Hide Inactive Objects: true
- Class: rviz/MoveCamera
- Class: rviz/Select
- Class: rviz/FocusCamera
- Class: rviz/Measure
- Class: rviz/SetInitialPose
Topic: /initialpose
- Class: rviz/SetGoal
Topic: /move_base_simple/goal
- Class: rviz/PublishPoint
Single click: true
Topic: /clicked_point
Value: true
Views:
Current:
Class: rviz/Orbit
Distance: 4.48689
Enable Stereo Rendering:
Stereo Eye Separation: 0.06
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Focal Point:
X: 0
Y: 0
Z: 0
Name: Current View
Near Clip Distance: 0.01
Pitch: 0.695397
Target Frame: Frame>
Value: Orbit (rviz)
Yaw: 0.513582
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 882
Hide Left Dock: false
Hide Right Dock: false
QMainWindow State: 000000ff00000000fd00000004000000000000013c000002c3fc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000006400fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c0061007900730100000043000002c3000000de00fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f000002c3fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a005600690065007700730100000043000002c3000000b800fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000004c000000044fc0100000002fb0000000800540069006d00650100000000000004c00000025800fffffffb0000000800540069006d0065010000000000000450000000000000000000000269000002c300000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Time:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: false
Width: 1216
X: 17
Y: 28
然后这个是launch文件
"rvizconfig" default="$(find test_move)/rviz/urdf.rviz" />
"robot_description" command="$(find xacro)/xacro.py '$(find test_move)/urdf/my_robot.urdf'" />
"joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
"robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
"joy" type="joy_node" output="screen"/>
"takler" pkg="test_move" type="tf_broadcaster.py"/>
"rviz" pkg="rviz" type="rviz" args="-d $(arg rvizconfig)" required="true" />
注意里面的test_move换成你自己的包名就好了。
然后我们
roslaunch test_move display.launch
就可以启动一个可以用手柄操控的仿真机器人了