dso_ros笔记本摄像头/外接摄像头的安装与跑通【完整流程+填坑攻略】
dso_ros笔记本摄像头的安装与跑通
环境
- Ubuntu16.04
- ROS-kinetic
- dso_ros catkin版本
- 笔记本自带单目摄像头
- 安装编译成功的DSO
安装编译dso_ros
cd ~/catkin_dso/src
git clone https://github.com/JakobEngel/dso_ros.git #这里是catkin版本
export DSO_PATH=/home/YOUR_DSO_PATH/dso
cd dso_ros
gedit CMakeLists.txt
# 修改bin文件路径
set(EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin)
# 如果不修改,编译生成的bin将会存在build目录下,rosrun会找不到
mkdir build
cd build
cmake ..
make
sudo make install
cd ~/catkin_dso
catkin_make
安装编译usb_cam
cd ~/catkin_dso/src
git clone https://github.com/bosch-ros-pkg/usb_cam.git
cd ..
catkin_make
source ~/catkin_dso/devel/setup.bash
笔记本相机ROS标定
-
ROSwiki有相机矫正的官方文档,有单目的也有立体相机的教程,官方链接
-
参考链接
1 下载标定板
标定板下载链接
标定板为8x6,A4纸打印出来为,用直尺量square边长为24.5mm(这个根据自己标定板的大小自己量,大点好),即0.0245m,作为标定输入参数。
2 打开相机
cd ~/catkin_dso
source devel/setup.bash
roslaunch usb_cam usb_cam-test.get
# launch文件里面默认设备为/dev/video0,外接USB摄像头是有可能是/dev/video1,根据具体情况而定)
# 如果你没有矫正过的话,你会发现打开相机时会有一条警告
3 开始矫正
一般来说正常安装ros都是包含了camera_calibration,输入下面命令检查一下
~$ rosdep install camera_calibration
#All required rosdeps installed successfull
执行矫正文件
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.0245 image:=/usb_cam/image_raw camera:=/usb_cam
弹出display窗口
**注意:**如果没有的话检查你命令输入是否输入正确,例如:8x6,中间不能用 “*” ,是字母 “x”,–size,–square前面是两个"-",还要注意你的相机发出的话题是不是usb_cam/image_raw
4 采集样本
- 使得标定板尽量出现在摄像头视野的各个位置里
- CALIBRATE按钮变绿色,点击等待
- 点击COMMIT将结果保存到电脑路径:/home/××××/.ros/camera_info/head_camera.yaml
5 结果格式例下
[image]
width
640
height
480
[narrow_stereo]
camera matrix
644.987121 0.000000 331.735116
0.000000 647.308571 248.505845
0.000000 0.000000 1.000000
distortion
0.248372 -0.436036 -0.008074 -0.000495 0.000000
rectification
1.000000 0.000000 0.000000
0.000000 1.000000 0.000000
0.000000 0.000000 1.000000
projection
669.478394 0.000000 331.064954 0.000000
0.000000 669.226440 245.232233 0.000000
0.000000 0.000000 1.000000 0.000000
参数意义:
image_width、image_height代表图片的长宽 camera_name为摄像头名
camera_matrix规定了摄像头的内部参数矩阵
distortion_model指定了畸变模型
distortion_coefficients指定畸变模型的系数
rectification_matrix为矫正矩阵,一般为单位阵
projection_matrix为外部世界坐标到像平面的投影矩阵
运行dso_ros
编写相机文件:
gedit ~/catkin_dso/src/dso_ros/camera.txt
格式如下:
fx fy cx cy k1 k2 r1 r2
in_width in_height
"crop" / "full" / "fx fy cx cy 0"
out_width out_height
不同相机的格式写法不同,官方链接
打开一个终端
roscore
再开终端
source ~/catkin_dso/devel/setup.bash
roslaunch usb_cam usb_cam-test.launch
再开终端
source ~/catkin_dso/devel/setup.bash
rosrun dso_ros dso_live image:=/usb_cam/image_raw calib=/home/YOUR_PATH/camera.txt mode=1
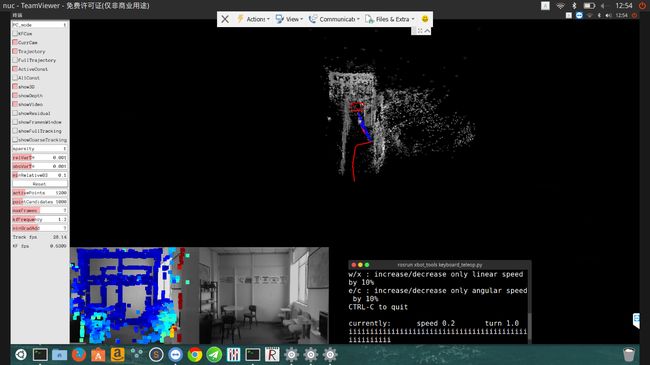
跑通图示
笔记本摄像头跑通截图:
可能遇到的问题
error1
/usr/bin/ld: CMakeFiles/dso_live.dir/src/main.cpp.o: undefined reference to symbol '_ZN5boost6system15system_categoryEv'
/usr/lib/x86_64-linux-gnu/libboost_system.so: error adding symbols: DSO missing from command line
collect2: error: ld returned 1 exit status
CMakeFiles/dso_live.dir/build.make:198: recipe for target 'bin/dso_live' failed
make[3]: *** [bin/dso_live] Error 1
error1解决办法
cd ~/catkin_dso/src/dso_ros
gedit CMakeLists.txt
# 编辑前:
target_link_libraries(dso_live ${DSO_LIBRARY} ${Pangolin_LIBRARIES} ${OpenCV_LIBS})
# 编辑后:
target_link_libraries(dso_live ${DSO_LIBRARY} ${Pangolin_LIBRARIES} ${OpenCV_LIBS} GL glut GLU boost_system)
error2
# 运行dso_ros出现
Couldn't find executable named dso_live below /home/chuanxu/catkin_dos/src/dso_ros
error2解决办法
- 可能原因1:下错了版本,下成了rosbuild,重新下载catkin版本并编译测试。
- 可能原因2:rosrun ××× 路径错误,找不到camera.txt,检查路径并修正即可。
error3
安装 usb_cam 出现error:
[usb_cam-1] process has died [pid 5257, exit code 1, cmd /home/zkzdzn/catkin_dso/devel/lib/usb_cam/usb_cam_node __name:=usb_cam __log:=/home/zkzdzn/.ros/log/ea6db8de-6759-11e9-a323-34415de66a2c/usb_cam-1.log].
log file: /home/zkzdzn/.ros/log/ea6db8de-6759-11e9-a323-34415de66a2c/usb_cam-1*.log
error3解决办法
rostopic list- 找到自己相机发布的image topic 例如: /camera/color/image_raw
- 找到usb_cam launch文件 修改重映射 remap 到自己相机发布的topic
# 修改前