深蓝学院《从零开始手写VIO》作业七
深蓝学院《从零开始手写VIO》作业七
- 深蓝学院《从零开始手写VIO》作业七
深蓝学院《从零开始手写VIO》作业七
将第二讲中的仿真数据(视觉特征,imu数据)接入VINS系统,并运行出轨迹结果
第一步:将IMU数据传入VINS系统
这部分的代码实现在run_euroc.cpp中的PubSimImuData部分,如下:
void PubSimImuData()
{
string sImu_data_file = sConfig_path + "imu_pose_noise.txt";
cout << "1 PubImuData start sImu_data_file: " << sImu_data_file << endl;
ifstream fsImu;
fsImu.open(sImu_data_file.c_str());
if (!fsImu.is_open())
{
cerr << "Failed to open imu file! " << sImu_data_file << endl;
return;
}
std::string sImu_line;
double dStampNSec = 0.0;
double tmp;
Vector3d vAcc;
Vector3d vGyr;
while (std::getline(fsImu, sImu_line) && !sImu_line.empty()) // read imu data
{
std::istringstream ssImuData(sImu_line);
ssImuData >> dStampNSec;
for(int i=0;i<7;i++)
ssImuData>>tmp;
ssImuData>>vGyr.x() >> vGyr.y() >> vGyr.z() >> vAcc.x() >> vAcc.y() >> vAcc.z();
pSystem->PubImuData(dStampNSec, vGyr, vAcc);
usleep(5000*nDelayTimes);
}
fsImu.close();
}
第二步:将特征数据传入VINS系统
读入特征数据的代码实现在run_euroc.cpp中的PubSimImageData部分,如下:
void PubSimImageData()
{
string sImage_file = sConfig_path + "cam_pose.txt"; //包含时间戳的文件
cout << "1 PubImageData start sImage_file: " << sImage_file << endl;
ifstream fsImage;
fsImage.open(sImage_file.c_str());
if (!fsImage.is_open())
{
cerr << "Failed to open image file! " << sImage_file << endl;
return;
}
std::string sImage_line;
double dStampNSec;
string sImgFileName;
int n=0;
while (std::getline(fsImage, sImage_line) && !sImage_line.empty())
{
std::istringstream ssImgData(sImage_line);
ssImgData >> dStampNSec; //读入时间戳
cout<<"cam time: "<PubSimImageData(dStampNSec, all_points_file_name);
usleep(50000*nDelayTimes);
n++;
}
fsImage.close();
}
第三步:修改System.cpp
通过函数loadPointData传入double时间戳和string文件名,如下:
TicToc t_r;
//trackerData[0].readImage(img, dStampSec);
trackerData[0].loadPointData(points_file_name,dStampSec);
第四步:修改feature_tracker.cpp
由于没有图像,并且所有的特征点都在每一个相机中被成功跟踪,所以就不用光流函数追踪。直接读入当前时刻相机对应的观测值并存入forw_pts即可,并将每个特征点的track_cnt++。对于初始时刻,由于cur_pts是空的,需要对该时刻的相机观测值forw_pts进行初始化,将该时刻相机对特征点的观测值(像素坐标)存入n_pts中,然后调用函数addPoints来完成forw_pts,ids,track_cnt的初始化。最后,将forw_pts赋值给cur_pts。并通过函数undistoredSimPoints来计算像素点的速度,如下:
void FeatureTracker::undistortedSimPoints()
{
cur_un_pts.clear();
cur_un_pts_map.clear();
//cv::undistortPoints(cur_pts, un_pts, K, cv::Mat());
for (unsigned int i = 0; i < cur_pts.size(); i++)
{
Eigen::Vector2d a(cur_pts[i].x, cur_pts[i].y);
cur_un_pts.push_back(cv::Point2f(cur_pts[i].x,cur_pts[i].y));
cur_un_pts_map.insert(make_pair(ids[i], cv::Point2f(cur_pts[i].x,cur_pts[i].y)));
//printf("cur pts id %d %f %f", ids[i], cur_un_pts[i].x, cur_un_pts[i].y);
}
// caculate points velocity
if (!prev_un_pts_map.empty())
{
double dt = cur_time - prev_time;
pts_velocity.clear();
for (unsigned int i = 0; i < cur_un_pts.size(); i++)
{
if (ids[i] != -1)
{
std::map::iterator it;
it = prev_un_pts_map.find(ids[i]);
if (it != prev_un_pts_map.end())
{
double v_x = (cur_un_pts[i].x - it->second.x) / dt;
double v_y = (cur_un_pts[i].y - it->second.y) / dt;
pts_velocity.push_back(cv::Point2f(v_x, v_y));
}
else
pts_velocity.push_back(cv::Point2f(0, 0));
}
else
{
pts_velocity.push_back(cv::Point2f(0, 0));
}
}
}
else
{
for (unsigned int i = 0; i < cur_pts.size(); i++)
{
pts_velocity.push_back(cv::Point2f(0, 0));
}
}
prev_un_pts_map = cur_un_pts_map;
}
实验结果
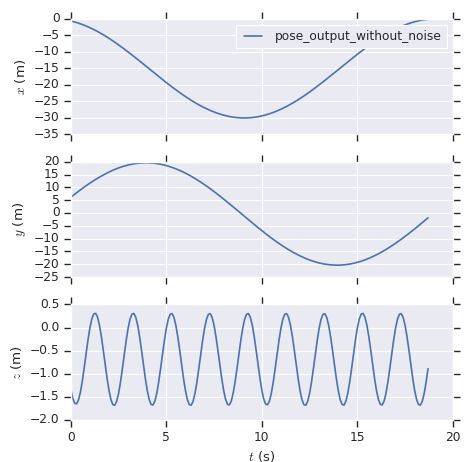
(1)无噪声仿真数据

(2)有噪声数据
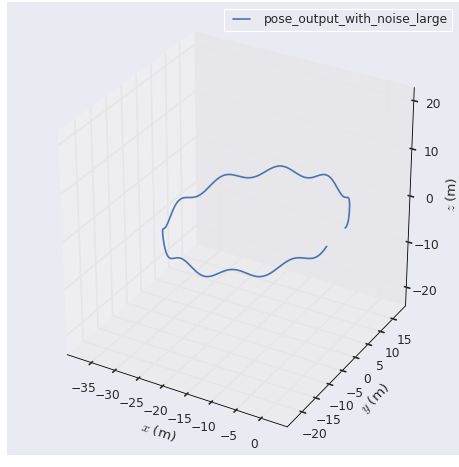
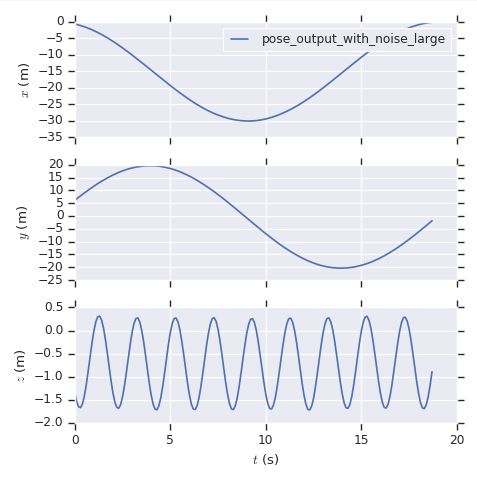
其中加速度计的bias随机游走的方差为0.0001,高斯噪声的方差为0.019; 陀螺仪的bias随机游走的方差为为1e-5,高斯噪声的方差为0.015
(3)实验结果对比
a. 带噪声数据
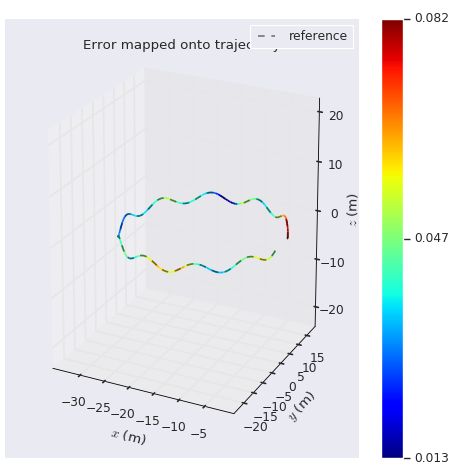
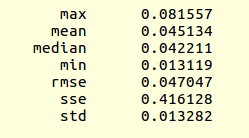
b.不带噪声数据
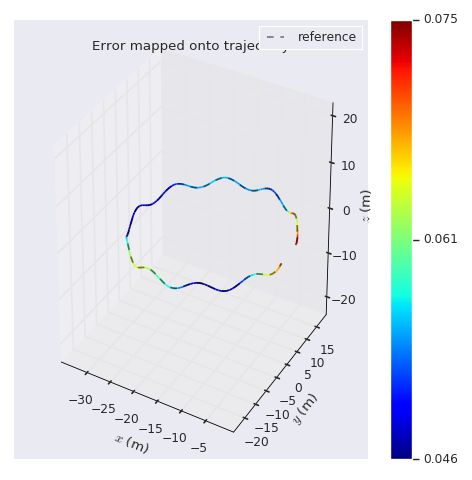
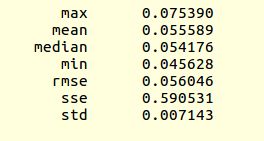
结论:带噪声的数据比不带噪声的数据效果声好。