线性代数的应用场景
机器学习与线性代数
自打我开始学习机器学习的相关知识以来,线性代数就一直是制约我读懂算法的最大短板。尽管经过大概两个月的学习,我的代数知识积累似乎已经足以让我不害怕任何数学推导了,但是毕竟是将来要赖以生存的本领,如果有一天忘记了它们我会很沮丧的。所以这里我还是决定整理一下与机器学习相关的所有数学知识,方便随时查阅,杜绝忘却。
笔记将以花书《深度学习》为思维导向,从底到上梳理各种可能用到的数学知识。
代数的运算律
和标量类似的运算律有分配律、结合律,而一般不满足交换律,因为代数是有维度的。
A B ≠ B A e x p : ( 2 x 3 ) × ( 3 x 2 ) = ( 2 x 2 ) b u t ( 3 x 2 ) × ( 2 x 3 ) = ( 3 x 3 ) AB \neq BA \qquad exp: (2x3)\times (3x2) = (2x2) \quad but \quad (3x2)\times (2x3) = (3x3) AB=BAexp:(2x3)×(3x2)=(2x2)but(3x2)×(2x3)=(3x3)
此外代数可以转置,也就是沿对角线反转矩阵。代数乘积的转置满足
( A B ) T = B T A T (AB)^T = B^TA^T (AB)T=BTAT
迹
T r ( A ) = ∑ i A i , i Tr(A) = \sum_iA_{i,i} Tr(A)=i∑Ai,i
只看这个定义看不出什么,体验它的作用还是在实践中。它有着非常好用的交换律,即使两个矩阵一个是nxn一个是mxm
T r ( A B ) = T r ( B A ) Tr(AB) = Tr(BA) Tr(AB)=Tr(BA)
范数
范数可以把向量映射为非负标量
∣ ∣ x ∣ ∣ p = ( ∑ i ∣ x i ∣ p ) 1 p ||x||_p = (\sum_i|x_i|^p)^{\frac{1}{p}} ∣∣x∣∣p=(i∑∣xi∣p)p1
范数常用来评估高维空间中的距离,经典的应用就是正则化和聚类。常用的范数有L1范数,即曼哈顿距离,L2范数即欧几里得距离,有时还会使用Linf范数,即计算向量中最大幅值元素的绝对值。
矩阵逆
单位矩阵一般写成 I I I,是对角线元素为1其他为0的方阵。为此我们有矩阵的逆矩阵的定义
A − 1 A = I A^{-1}A = I A−1A=I
做题和考试时求矩阵逆我们可能会采取手算的方法,就是通过多次基本矩阵变换把A变成I,这是同样把这些操作施加于单位矩阵上,就得到逆矩阵。矩阵可逆的条件是矩阵正定,即矩阵中不存在线性相关项。同时,单位正交矩阵的逆矩阵就是它自己的转置。
特征值分解
应某些问题需要,我们经常会用到矩阵对角化的运算。对一个方阵B,我们希望得到
B = P − 1 A P B = P^{-1}AP B=P−1AP
其中A是对角矩阵,即对角线上的元素非零其他为零。而P是单位正交矩阵,单位正交矩阵的每一列对应的列向量都是单位向量,且两两正交。也就是满足
d i a g ( A ) = { λ 1 , . . . , λ n } diag(A) = \{\lambda_1,...,\lambda_n\} diag(A)={λ1,...,λn}
P T P = I P^TP = I PTP=I
这样的矩阵分解方法也可以写成多个向量外积的加和
B = λ 1 p 1 p n T + . . . + λ n p n p n T B = \lambda_1 p_1p_n^T+...+\lambda_np_np_n^T B=λ1p1pnT+...+λnpnpnT
这种分解得到的对角矩阵中的标量称为特征值,每个特征值都会对应一个特征向量。一般的矩阵不一定能对角化,但是对称矩阵一定可以对角化。正定矩阵的特征值都是非负的。
行列式
计算大家都懂,它会得到矩阵所有特征值的乘积。一个有用的性质是, 如果方阵线性相关, 行列式的值为0.
SVD分解
我们不能对一般的矩阵(不一定是方阵)进行对角化,但是我们可以用一些运算构造出能分解的对称矩阵。
M = A T A M = A^TA M=ATA为对称正定矩阵,因为
( A T A ) T = A T ( A T ) T = A T A (A^TA)^T = A^T(A^T)^T = A^TA (ATA)T=AT(AT)T=ATA
x T A T A x = ( x T A T ) ( A x ) = ( A x ) T ( A x ) ≥ 0 x^TA^TAx = (x^TA^T)(Ax) = (Ax)^T(Ax) \ge 0 xTATAx=(xTAT)(Ax)=(Ax)T(Ax)≥0
很容易看出,M的转置仍然是自己,且不论是用怎样的特征向量,得到的 λ \lambda λ特征值都是非负数。这样我们就能对这个 A T A A^TA ATA进行SVD分解
( A T A ) n x n = U T D U (A^TA)_{nxn} = U^TDU (ATA)nxn=UTDU
( A A T ) m x m = V T D V (AA^T)_{mxm} = V^TDV (AAT)mxm=VTDV
两个矩阵分解得到的中间的对角矩阵,也就是得到的特征值相同。
A m x n = V m x m T d i a g ( { λ 1 1 2 , . . . λ n 1 2 } ) U n x n T A_{mxn}=V^T_{mxm}diag(\{\lambda_1^{\frac{1}{2}},...\lambda_n^{\frac{1}{2}}\})U^T_{nxn} Amxn=VmxmTdiag({λ121,...λn21})UnxnT
A m x n = λ 1 1 2 v 1 u 1 T + . . . + λ n 1 2 v n u n T A_{mxn}=\lambda_1^{\frac{1}{2}}v_1u_1^T+...+\lambda_n^{\frac{1}{2}}v_nu_n^T Amxn=λ121v1u1T+...+λn21vnunT
这样就能对任意的矩阵进行奇异值的分解。得到的对角矩阵中的标量称为奇异值,左侧矩阵的向量称为左奇异向量,右侧称为右奇异向量。
SVD分解和特征值分解都常被用作矩阵的压缩保存,我们可以不保存所有特征向量,只保存一部分特征向量来重构原矩阵。
应用1:线性回归
我们在学习线性代数时知道用矩阵方法求解线性方程组,事实上对于一个线性方程组 A n x n x = y A_{nxn}x=y Anxnx=y,我们完全可以用 x = A − 1 y x = A^{-1}y x=A−1y来计算线性方程组的解。当然A可逆的条件是A为方阵且A中的每个行向量线性无关,也就是A正定。但是实际使用中我们并不会有那么好的运气,在做线性回归时,我们的数据集的有效数据个数rank和数据维度m不总是相等的。当rank大于m时线性方程组无解,当rank小于m时方程组有无穷个解。解决这个问题的简单方法是使用伪逆。
我们将不追求得到尽善尽美的解,而是追求最小化均方误差 ∣ ∣ A x − y ∣ ∣ 2 ||Ax-y||_2 ∣∣Ax−y∣∣2。这种凸优化问题,我们只需要对均方误差求导就能得到最小化误差的解。
L = ( A x − y ) T ( A x − y ) L = (Ax-y)^T(Ax-y) L=(Ax−y)T(Ax−y)
∂ L ∂ x = 2 A T ( A x − y ) = 0 \frac{\partial L}{\partial x} = 2A^T(Ax-y)=0 ∂x∂L=2AT(Ax−y)=0
这时得到的解是
x = ( A T A ) − 1 A T y x = (A^TA)^{-1}A^Ty x=(ATA)−1ATy
当A矩阵像上面的列数m多于行数n,则上面的方法并不能得到好的解,因为这时A的秩(最大线性无关行的个数)不会大于n,而n
x = l i m α → 0 ( A T A + α I ) − 1 A T y x = lim_{\alpha \rightarrow 0}(A^TA+\alpha I)^{-1}A^Ty x=limα→0(ATA+αI)−1ATy
这时就可以求逆了,可以直观地理解,我们在每个向量 v m v_m vm的第m维加上了一点点的增量,这样即使原本线性相关的向量也会被变成线性无关。这样,我们就能对任意的A求解一个线性方程组近似解,也就是线性回归解。
上面的这个 ( A T A + α I ) − 1 A T (A^TA+\alpha I)^{-1}A^T (ATA+αI)−1AT又叫伪逆 A + A^+ A+,我们一般会用奇异值分解帮助我们计算伪逆。即 A + = V D + U T A^+ = VD^+U^T A+=VD+UT,对角矩阵D的伪逆就是对D的非零元素取倒数再转置。如果我们用伪逆在数据集上进行线性回归,得到的解会让欧几里得距离,也就是上面的损失函数最小。同时如果引入正则化项,还能在m多于rank时,从无穷个解中找到最小范数的解x。
实例:小车初速度与加速度测定
我们在物理实验中会让小车在光滑平面上运动, 通过记录时间和路程构成的多个数据点并做数据分析, 得到小车实际的初速度和加速度. 这个过程实际上是一个线性回归, 我们知道路程-时间公式可以写成
s = s 0 + v 0 t + a t 2 s = s_0+v_0 t+a t^2 s=s0+v0t+at2
那么问题实际上是一个三元的线性回归, 变量分别是 1 1 1, t t t, t 2 t^2 t2, 我们把三元数据和路程做线性回归, 就能得到一个权值向量x, 它的三个维度的意义就是上面的 s 0 , v 0 , a s_0,v_0,a s0,v0,a.
import numpy as np
# 小车斜面下落实验, 加速度为4.9, 初速度2, 初始路程1
t = np.linspace(0, 5, 20)
s = 1 + 2*t + 4.9*t**2
# 加一些噪声,可以理解为实验中的测量误差
s += np.random.randn(*s.shape)*0.01
# 构造数据的三元矩阵
A = np.concatenate([np.ones(t.shape).reshape(1,-1),
t.reshape(1,-1),
(t**2).reshape(1,-1)]).T
# 计算线性回归的权值向量x
x = np.linalg.pinv(A).dot(s)
print("Displacement: %.4f"%(x[0]))
print("Initial velocity: %.4f"%(x[1]))
print("Acceleration: %.4f"%(x[2]))
Displacement: 0.9971
Initial velocity: 1.9972
Acceleration: 4.9009
应用2:主成分分析(PCA)
我们希望通过一个线性变换,把现有的数据集 X n x m X_{nxm} Xnxm通过变换矩阵 W m x d W_{mxd} Wmxd变换到d维,从而实现数据降维的需要。这个W要满足正交基的性质,即 W T W = I W^TW=I WTW=I,是单位正交矩阵。
为了实现"变换后的数据丢失尽可能少的信息",我们会定义一个损失函数,让这些降维后的数据点分得尽可能开。这个损失函数就设定为变换后数据集的方差,我们希望最大化方差。为了处理起来简便,我们在一开始就把X标准化处理,让它的均值为零,那么降维后的均值 μ = 0 \mu=0 μ=0。
E ( W ) = ∑ i n ∣ ∣ x i W − μ ∣ ∣ 2 2 = ∑ i n ∣ ∣ x i W ∣ ∣ 2 2 E(W) = \sum_i^n||x_iW-\mu||_2^2= \sum_i^n||x_iW||_2^2 E(W)=i∑n∣∣xiW−μ∣∣22=i∑n∣∣xiW∣∣22
这个损失函数可以用上面迹的定义写成非常好看的矩阵乘法形式
E ( W ) = t r [ ( X W ) ( X W ) T ] E(W) = tr[(XW)(XW)^T] E(W)=tr[(XW)(XW)T]
加上上面的W单位正交条件,这个问题是一个约束优化问题,最优解一定满足KKT条件。构造出拉格朗日函数,设$\lambda $是拉格朗日乘子的d维行向量。我们有
L ( W ) = E ( W ) + λ t r ( W T W − I ) = t r [ ( X W ) ( X W ) T ] − λ t r ( W T W − I ) L(W) = E(W)+\lambda tr(W^TW-I) = tr[(XW)(XW)^T] -\lambda tr(W^TW-I) L(W)=E(W)+λtr(WTW−I)=tr[(XW)(XW)T]−λtr(WTW−I)
∂ L ∂ W = 2 X T ( X W ) − 2 λ W = 0 → X T X W = λ W \frac{\partial L}{\partial W} = 2X^T(XW)-2\lambda W = 0 \rightarrow X^TXW = \lambda W ∂W∂L=2XT(XW)−2λW=0→XTXW=λW
这说明W中的每个向量都满足 X T X w i = λ i w i X^TXw_i = \lambda_iw_i XTXwi=λiwi的条件,也就是,W中的每个向量都是 X T X X^TX XTX的特征向量。但是特征向量可能有很多,我们只需要d个,该选择哪d个呢?让我们回到上面的误差函数E
E ( W ) = t r [ ( X W ) T ( X W ) ] = t r [ W T X T X W ] = t r [ W T λ W ] = t r [ λ W T W ] = t r [ λ I ] = ∏ i d λ i E(W) = tr[(XW)^T(XW)] = tr[W^TX^TXW] = tr[W^T\lambda W]=tr[\lambda W^TW]=tr[\lambda I] = \prod_i^d \lambda_i E(W)=tr[(XW)T(XW)]=tr[WTXTXW]=tr[WTλW]=tr[λWTW]=tr[λI]=i∏dλi
我们会发现我们想最大化的误差E就是w特征向量对应的特征值的乘积。如果我们要最大化这个误差,只需要找最大的d个特征值即可。
综上,算法的流程为,对X进行标准化,然后对 X T X X^TX XTX进行特征值分解,并取出前d个最大特征值对应的特征向量拼接成W,返回 X W XW XW,算法结束。
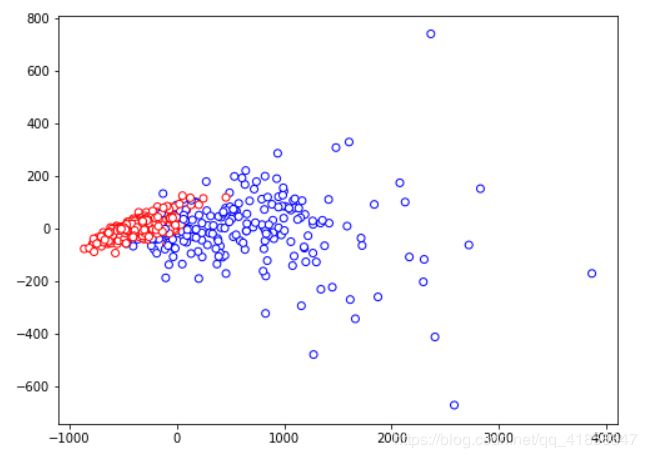
实例:数据可视化
在数据科学中, 我们要处理的数据往往超过三个维度, 几十维甚至上百维的数据是很常见的. 为了直观的观察数据的分布与它的特征之间的关系, 我们常常要用降维手段把它降到2维平面, 再plot出来观察. PCA可以胜任这个工作.
这里我们用经典的乳腺癌数据集(30维特征)做降维到2维, 并观察数据的分布和类别的关系. 在此之上判断我们下一步该用什么机器学习方法解决问题.
def PCA(X, dim):
'''
X, size(n,m), n个m维的数据点构成的数据集矩阵
dim, 目标降维维度, dim
# 归一化处理
means = np.mean(X,axis = 0)
X = X.copy()-means
# 计算要特征值分解的协方差矩阵
Covs = X.T.dot(X)
# 特征值分解
lamda,V = np.linalg.eigh(Covs)
index = np.argsort(-lamda)[:dim]
W = V[:,index]
return X.dot(W)
# 导入数据集
from sklearn import datasets
X,y = datasets.load_breast_cancer(return_X_y = True)
X_2dim = PCA(X, 2)
import matplotlib.pyplot as plt
import matplotlib
plt.figure(figsize=(8,6))
ec_list = ['b' if n==0 else 'r' for n in y]
plt.scatter(X_2dim[:,0],X_2dim[:,1],c = 'w', edgecolor = ec_list)
plt.show()
可以看见的是良性肿瘤(红色)的分布较为集中, 表现出高斯簇的形状, 而恶性肿瘤(兰色)则比较发散
所以我们可以把这个问题用二分类模型来解, 也可以用无监督的多维高斯模型构造异常检测系统
应用3:PageRank
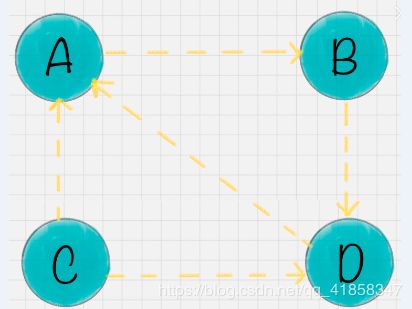
page rank是google在世纪初使用的搜索引擎技术, 它是一种结合了线性代数, 图论和数值计算的高效机器学习算法. 但究其原理其实并不复杂, 我们先构思一个图模型, 它的每个顶点是一个独立的网页. 这些网页之间被超链接互联, 从而让这个图模型是一个有向图. 这时我们就能给出一个假设, 网络中的用户流在顶点V时, 有等概率流向它的所有其他子顶点. 这样的假设建立了网页间的影响力关系线性方程组, 举个例子, 下面的网页图模型.
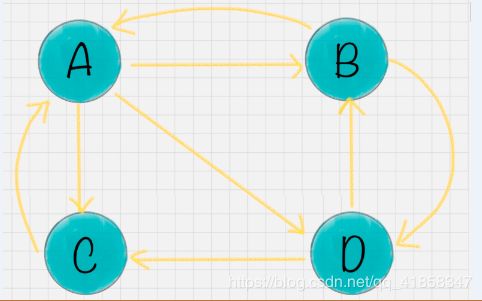
也就是, 我们把每个顶点的分流因子1平均赋值到所有子结点, 形成一个nxn的矩阵M. 所有顶点的影响力满足线性方程组 M x = x Mx = x Mx=x
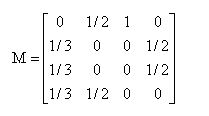
解一个这样的线性方程组就能得到解x, 它就是所有网页的影响力值, 可以通过排序被用在网页的推荐上. 但是这样的解法是有一定问题的, 一个是效率的问题, 我们的网页数目通常会很多, 100k以上都是比较少的了, 这样的线性方程组的系统不适合直接求解, 而且即使直接解, 也不能保证解是唯一的. 因此我们一般使用带约束的迭代解法, 一般如下面的流程.
- 初始化x为一个 ∣ ∣ x ∣ ∣ 1 = 1 ||x||_1 = 1 ∣∣x∣∣1=1的向量
- 迭代计算 x ← M x x\leftarrow Mx x←Mx
- x不再变化时, 停止迭代
这是不动点迭代的思想, 因为M的每一列的所有元素和为1, 迭代计算可以保证 ∣ ∣ x ∣ ∣ 1 = 1 ||x||_1 = 1 ∣∣x∣∣1=1始终成立, 而这样的迭代计算会让x向真正的解不断靠近直至收敛. 这个迭代次数一般不会太多, 所以这种解法能适用于有一定特殊性的本问题, 而且效率比RREF的方法高效得多
这样的解法可行, 但是我们仍然会面临两个很重要的问题, 它们会让解变得无效化.
- 等级泄露(Rank Leak):如果一个网页没有出链,就像是一个黑洞一样,吸收了其他网页的影响力而不释放,最终会导致其他网页的 PR 值为 0。
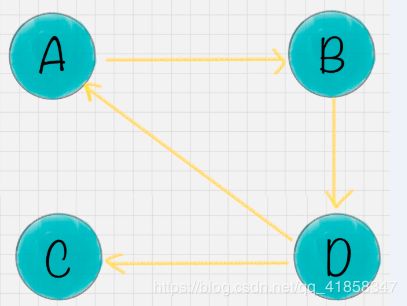
- 等级沉没(Rank Sink):如果一个网页只有出链,没有入链(如下图所示),计算的过程迭代下来,会导致这个网页的 PR 值为 0
为此我们可以引入一个合理的另一个假设, 我们假设在浏览网页时, 用户不会老老实实跟着超链接走下去, 很有可能看到一半感觉无聊了, 就随机跳到了一个另外的界面. 也就是, 我们引入这样的随机浏览因素, 把原来的M矩阵写成新的PR矩阵
P R = ( 1 − d ) M + d O n e s n PR = (1-d)M+d \frac{Ones}{n} PR=(1−d)M+dnOnes
这样的变化会让我们的计算收敛到一个有意义的解, 避免了无效解的产生
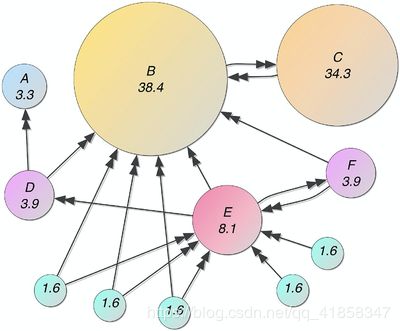
实例: 网页推荐
我们按照下面的网页连接状况进行建模, 并计算出网络影响力, 以此作为排序标准进行网页推荐.
hyperlinks = [
(3, 0),
(3, 1),
(4, 3),
(4, 1),
(1, 2),
(2, 1),
(5, 1),
(4, 5),
(5, 4),
(6, 1),
(6, 4),
(7, 1),
(7, 4),
(8, 1),
(8, 4),
(9, 4),
(10, 4)
]
n = 11
hyperlinks = np.array(hyperlinks)
M = np.zeros((n,n))
M[hyperlinks[:,1],hyperlinks[:,0]] = 1
for i in range(n):
if np.sum(M[:,i])>0:
M[:,i] /= np.sum(M[:,i])
d = 0.175
PR = (1-d)*M + d*np.ones((n,n))/n
x = np.ones((n,1))/n
for iter in range(50):
x = PR.dot(x)
x /= np.sum(x)
x = x[:,0]
x *= 100
sorted_indices = np.argsort(-x)
for i in sorted_indices:
name = chr(ord('A')+i)
print("Page "+name+": Score: %5.3f"%(x[i]))
Page B: Score: 38.322
Page C: Score: 34.143
Page E: Score: 8.163
Page D: Score: 3.943
Page F: Score: 3.943
Page A: Score: 3.308
Page G: Score: 1.636
Page H: Score: 1.636
Page I: Score: 1.636
Page J: Score: 1.636
Page K: Score: 1.636
小结
线性代数和概率论给我的感觉是, 它们就是机器学习和深度学习的基石, 比起最优化理论还要重要. 早知如此大一就不听我们的废柴老师讲的线代了, 自己看名校网课不是美滋滋? 我学线代时完全不知道这东西有什么用, 直到自己开始接触高级一点的机器学习问题或者物理建模, 才知道没学好这东西是一个多大的短板.