参考: 《算法导论》
一棵随机构造的二叉查找树的期望高度为O(logn),从而这种树上基本动态集合操作的平均时间为logn.红黑树是二叉查找树的一种变形。
二叉查找树的性质:设x为二叉查找树中的一个节点.如果y是x的左子树中的一个节点,则key[y]<=key[x].如果y是x的右子树中的一个节点,则key[y]>=key[x].
由二叉查找树的性质可知,中序遍历可以顺序输出树中的所有关键字。
1 /*中序遍历二叉查找树*/ 2 InOrder_Tree_Walk(x) 3 { 4 if(x!=NULL) 5 { 6 InOrder_Tree_Walk(left[x]); 7 print x; 8 InOrder_Tree_Walk(right[x]); 9 } 10 }
查找
1 /*给定树根的指针和关键字k,返回包含关键字k的节点,不存在则返回空*/ 2 Tree_Search(x,k) 3 { 4 if(x==NULL||key[x]==k) 5 return x; 6 if(k<key[x]) 7 return Tree_Search(left[x],k); 8 else 9 return Tree_Search(right[x],k); 10 }
最小/大关键字元素
/*返回一个指向以x为根的子树中的最小元素的指针*/ Tree_Minimum(x) { while(left[x]!=NULL) x=left[x]; return x; }
/*返回一个指向以x为根的子树中的最大元素的指针*/ Tree_Maximum(x) { while(right[x]!=NULL) x=right[x]; return x; }
后继:某一节点x的后继为具有大于key[x]中的关键字中最小者的那个节点。
1 /*返回节点x的后继节点,如果x是具有最大关键字的节点的话,则返回空*/ 2 Tree_Successor(x) 3 { 4 if(right[x]!=NULL) 5 return Tree_Minimum(right[x]); 6 y=p[x]; //x的父亲 7 while(y!=NULL&&x==right[y]) 8 { 9 x=y; 10 y=p[x]; 11 } 12 return y; 13 }
前趋:某一节点x的前趋为具有小于key[x]中的关键字中最大者的那个节点。
1 /*返回节点x的前趋节点,如果x是具有最小关键字的节点的话,则返回空*/ 2 Tree_Predecessor(x) 3 { 4 if(left[x]!=NULL) 5 return Tree_Maximum(left[x]); 6 y=p[x]; //x的父亲 7 while(y!=NULL&&x==left[y]) 8 { 9 x=y; 10 y=p[x]; 11 } 12 return y; 13 }
对于一棵高度为h的二叉查找树,以上几个操作(除中序遍历外)的复杂度均为O(h).
插入
为将一个新值v插入到二叉查找树T中,可调用过程Tree_Insert.传给该过程的参数是个节点z,并且有key[z]=v,left[z]=NULL,right[z]=NULL。该过程修改了T和z的某些域,并把z插入到树T中适当的位置上。
1 Tree_Insert(T,z) 2 { 3 y=NULL; 4 x=root[T]; 5 while(x!=NULL) 6 { 7 y=x; 8 if(key[z]<key[x]) 9 x=left[x]; 10 else 11 x=right[x]; 12 } 13 p[z]=y; 14 if(y==NULL) //Tree T is empty 15 root[T]=z; 16 else if(key[z]<key[y]) 17 left[y]=z; 18 else 19 right[y]=z; 20 }
删除
将节点z从二叉查找树T中删除,有以下三种情况:(1).z没有子女,则修改其父节点p[z],使NULL为其子女;(2).z只有一个子女,则可以通过在其子节点和父节点之间建立一条链来删除z;(3).z有两个子女,则可以先删除z的后继y(由后继的定义可知y一定没有左子女),再用y的内容代替z的内容。
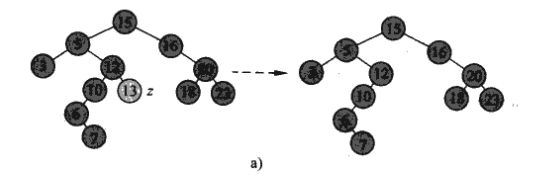
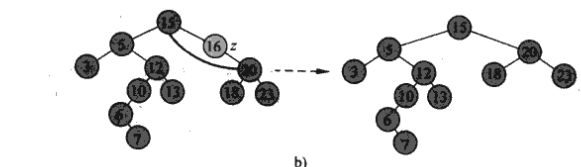
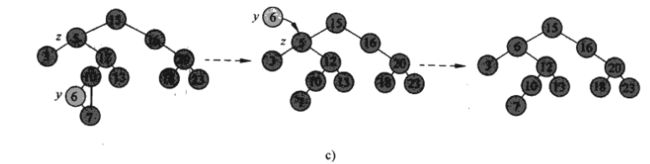
1 Tree_Delete(T,z) 2 { 3 if(left[z]==NULL||right[z]==NULL) 4 y=z; 5 else 6 y=Tree_Successor(z); 7 if(left[y]!=NULL) //y=z的情况 8 x=left[y]; 9 else 10 x=right[y]; 11 if(x!=NULL) 12 p[x]=p[y]; //在y的子节点和父节点之间建立一条链来删除y 13 if(p[y]==NULL) //z是树T的根的情况,即要删除树根的情况 14 root[T]=x; 15 else if(y==left[p[y]]) 16 left[p[y]]=x; 17 else 18 right[p[y]]=x; 19 if(y!=z) //z有两个子女的情况,用刚才删除的y的内容代替z的内容,相当于删除了z 20 key[z]=key[y]; 21 return y; 22 }
对于高度为h的二叉查找树,动态集合操作插入和删除的时间复杂度为O(h).
《算法导论》上的定理:一棵在n个关键字上随机构造的二叉查找树的期望高度为O(logn)。
另外,还给出了包含n个节点的不同的二叉树(是二叉树,而不仅仅是二叉查找树)的数目:bn=(1/(n+1))*C(2n,n) (即第n个卡特兰数)。证明见《算法导论》。