slam14讲ch4作业----双目视差图恢复点云图
仅用于个人学习记录。
参考了这篇答案
一、工程描述(深蓝学院slam14–ch4课后作业)
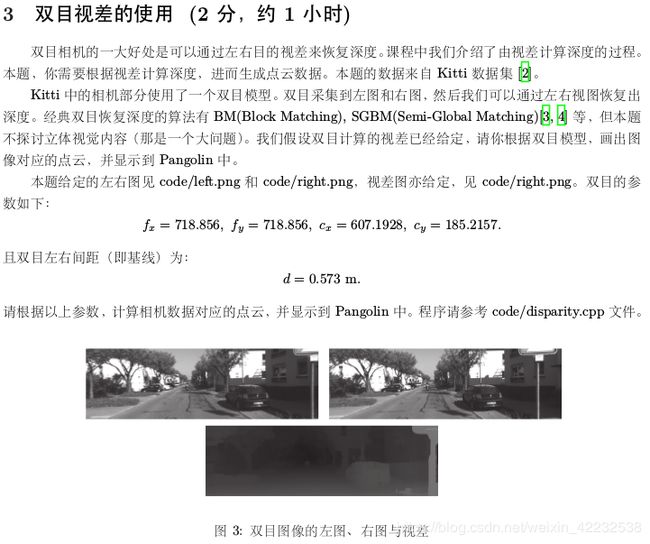
利用kitti数据集中的双目相机图像部分,给的left.png right.png以及视差图diapaity.png来恢复出三位点云(主要计算深度z)并用Pangolin显示。
left.png
 right.png
right.png
 disparity.png
disparity.png
 二、思路分析
二、思路分析
//1.拿到left.png right.png disparity.png 三张图,但是right.png实际上是没有用到的。
//2.以left中像素点进行遍历,与left每个像素点对应,在disparity中有每个点的视差信息,用0-255表示。
//因此对于每个像素点(v,u),其空间点的深度 z = fb/d
//3.在使用pangolin画图时,每个点具有4个值,x y z w ,z已经算出,x y 利用像素到空间的缩放平移公式 u = fxx+cx/z 来计算,w就用left对应点上点颜色即可
//4.在pangolin中画图,已写好,无需调整*
三、代码部分(主要都是课程中写好的)
需要提前安装库: opencv pangolin Eigen3等
disparity.cpp
//
// Created by 高翔 on 2017/12/15.
//
#include
#include
#include
#include
#include
using namespace std;
using namespace Eigen;
// 文件路径,如果不对,请调整
string left_file = "./left.png";
string right_file = "./right.png";
string disparity_file = "./disparity.png";
//笔记:
//拿到left.png right.png disparity.png 三张图,但是right.png实际上是没有用到的。
//以left中像素点进行遍历,与left每个像素点对应,在disparity中有每个点的视差信息,用0-255表示。
//因此对于每个像素点(v,u),其空间点的深度 z = fb/d
//在使用pangolin画图时,每个点具有4个值,x y z w ,z已经算出,x y 利用像素到空间的缩放平移公式 u = fx*x+cx/z 来计算,w就用left对应点上点颜色即可
// 在pangolin中画图,已写好,无需调整
void showPointCloud(const vector> &pointcloud);
int main(int argc, char **argv) {
// 内参
//是左相机点缩放系数fx fy,和平移系数cx cy
double fx = 718.856, fy = 718.856, cx = 607.1928, cy = 185.2157;
// 间距
double b = 0.573;
//焦距
double f = 0.04;
// 读取图像
cv::Mat left = cv::imread(left_file, 0);
// cv::Mat right = cv::imread(right_file, 0);
cv::Mat disparity = cv::imread(disparity_file, 0); // disparty 为CV_8U,单位为像素
// 生成点云
vector> pointcloud;
// TODO 根据双目模型计算点云
// 如果你的机器慢,请把后面的v++和u++改成v+=2, u+=2
for (int v = 0; v < left.rows; v+=2)
for (int u = 0; u < left.cols; u+=2) {
Vector4d point(0, 0, 0, left.at(v, u) / 255.0); // 前三维为xyz,第四维为颜色
// start your code here (~6 lines)
// start your code here (~6 lines)
unsigned int d=disparity.at(v,u);
//视差图disparty中(v,u)点,带有视差信息d,其深度d用像素值来表达0-255之间
if(d==0)
continue; //视差d=0表示该点没有深度不用估计
cout<> &pointcloud) {
if (pointcloud.empty()) {
cerr << "Point cloud is empty!" << endl;
return;
}
pangolin::CreateWindowAndBind("Point Cloud Viewer", 1024, 768);
glEnable(GL_DEPTH_TEST);
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)
);
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
while (pangolin::ShouldQuit() == false) {
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
d_cam.Activate(s_cam);
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);
glPointSize(2);
glBegin(GL_POINTS);
for (auto &p: pointcloud) {
glColor3f(p[3], p[3], p[3]);
glVertex3d(p[0], p[1], p[2]);
}
glEnd();
pangolin::FinishFrame();
usleep(5000); // sleep 5 ms
}
return;
}
CMakeLists.txt
cmake_minimum_required(VERSION 2.8.3)
project(disparity)
set(CMAKE_CXX_STANDARD 11)
find_package(OpenCV)
find_package(Eigen3)
find_package(Pangolin)
include_directories(${Pangolin_INCLUDE_DIRS})
#include_directories( "/usr/include/eigen3" )
include_directories(${EIGEN3_INCLUDE_DIR})
add_executable(disparity disparity.cpp)
target_link_libraries(disparity ${OpenCV_LIBS} ${Pangolin_LIBRARIES})
结果:
