计算机与数学 —— 四元数的应用与分析
这篇博客介绍了四元数在计算机图形学中的应用
四元数
四元数在3D数学中可以用来表现旋转。四元数由四个数字组成 —— (x,y,z,w) 。其中 (x,y,z) 用于旋转所围绕的轴的向量,而 w 可以用来表现旋转的角度θ,其公式为:
四元数也可以写作一个标量n后接着一个用黑体表示的向量v,例如:
四元数的好处
相对于矩阵操作或者欧拉角,使用四元数有着三个好处:
万向节死锁(gimbal lock)
万向节死锁指的是在旋转过程中,两个轴出现了重合的情况,这样一来就使得物体丢失了绕一个轴旋转的能力。

如果使用四元数,则不会出现这个情况。由于四元数所代表的是绕着某个轴的旋转,因此不会产生万向节死锁的问题。
更加顺滑的插值
在骨骼动画的插值中,相对于使用矩阵来进行Rotation中的插值,使用四元数来进行插值能够获得更加顺滑的插值,同时计算量也少得多。
占用更少的空间
这个优点很好理解 —— 四元数由四个数来表示,而矩阵则需要16个数来表示,因此所占用的空间更少。另一方面,就CPU周期来说,四元数的某些操作也更加便宜。
四元数的运算
四元数有着自己的一套运算法则,这篇博客参考了Ken Shoemake的论文,传送门。
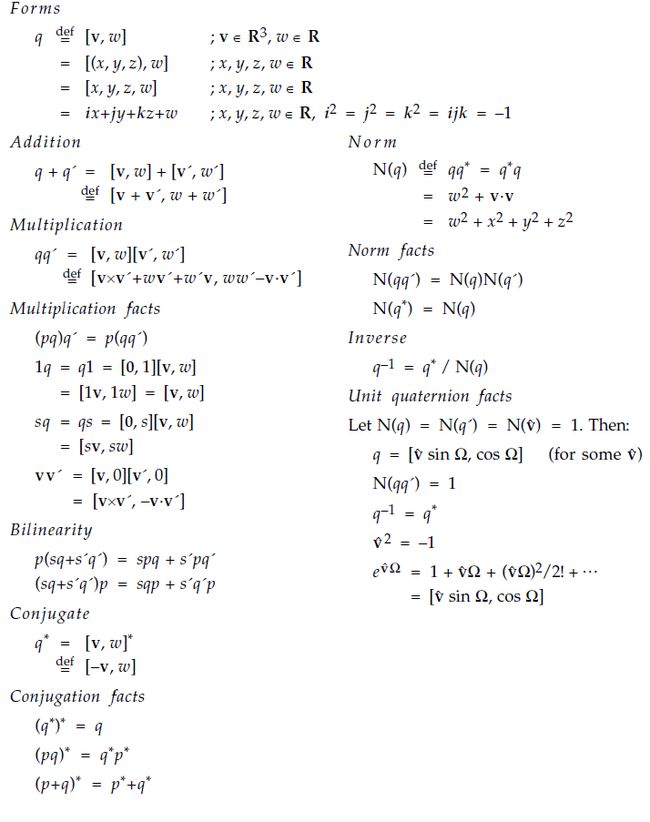
基本运算法则
一些最基本的运算法则如下:
四元数的旋转
我们可以使用四元数来针对向量或者其他四元数进行旋转,旋转公式如下:
其中,p可以是一个向量,也可以是一个四元数。值得一提的是,如果是针对于向量的旋转,我们需要的四元数的标量部分应该为0,并且最后我们需要忽略掉最终结果的标量部分。
下面是这个公式的证明,先可以推断出三个结论:
1. 在形式为 p′=q(p)(q−1) 的运算中, p=[v,w] , p′=[v′,w] ,那么 N(v)=N(v′)
2. 四元数 q 与任意的非零实数相乘,上面的公式仍然成立。
3. 如果 N(q)=1 ,那么 q=[vsinΩ,cosΩ] 的运算就能够将四元数或向量 p 绕着轴 v 旋转 2Ω 度。
下面是这三个结论的证明过程:
先可以证明第二条结论。对于任意非零实数 s ,我们有:
又由于交换率,可以得到:
因此第二条可证。
因此可以直接将四元数 q 来当作单位四元数来看,由基本运算规律可得,对于单位四元数 q ,有 q∗=q−1 ,因此 qpq−1=qpq∗ 。
接下来就可以证明结论一,由四元数的基本运算规律可知,对于一个四元数 q ,它的标量部分可以使用 2S(q)=q+q∗ 来获得。
那么可以进一步推论:
由乘法分配率得:
这样就说明了四元数的标量不变,而由于上面我们已经把可以将四元数 q 当作单位四元数来看,因此 N(q)=N(q∗)=1 。由于四元数的模长相等,标量部分也相等,因此其向量部分的模也相等。
最后我们来证明结论三,下图中 N(v0)=N(v1)=1 ,我们令 q=v1v∗0=[v0×v1,v0⋅v1] ,而在图中可以很容易得出 v0⋅v1=cosΩ :

令 v^=v0×v1∥v0×v1∥ ,换句话说 v^ 就是一个垂直 v0 与 v1 的单位向量,因此我们可以得出:
此时我们令 v2=qv0q∗ 并且将其进一步扩展为 v2v∗1 ,可得:
又由于 q=v1v∗0 ,我们有:
因此可以判定 v2v∗1 与 v1v∗0 有同样的结构,所以 v2 与 v1 、 v0 在同一平面,且 v2 与 v0 的角度为 2Ω 。
因此结论3得证。
<全文完>