凸优化学习笔记17:次梯度下降法
对于光滑函数,我们可以用梯度下降法,并且证明了取不同的步长,可以得到次线性收敛,如果加上强凸性质,还可以得到线性收敛速度。那如果现在对于不可导的函数,我们就只能沿着次梯度下降,同样会面临步长的选择、方向的选择、收敛性分析等问题。
1. 收敛性分析
次梯度下降的一般形式为
x ( k ) = x ( k − 1 ) − t k g ( k − 1 ) , k = 1 , 2 , … g ∈ ∂ f ( x ( k − 1 ) ) x^{(k)}=x^{(k-1)}-t_{k} g^{(k-1)}, \quad k=1,2, \ldots \quad g\in\partial f(x^{(k-1)}) x(k)=x(k−1)−tkg(k−1),k=1,2,…g∈∂f(x(k−1))
一般有 3 种步长的选择方式:
- fix step: t k t_k tk 为常数
- fix length: t k ∥ g ( k − 1 ) ∥ 2 = ∥ x ( k ) − x ( k − 1 ) ∥ 2 t_{k}\left\|g^{(k-1)}\right\|_{2}=\left\|x^{(k)}-x^{(k-1)}\right\|_{2} tk∥∥g(k−1)∥∥2=∥∥x(k)−x(k−1)∥∥2 为常数
- diminishing: t k → 0 , ∑ k = 1 ∞ t k = ∞ t_{k} \rightarrow 0, \sum_{k=1}^{\infty} t_{k}=\infty tk→0,∑k=1∞tk=∞
要证明这几种方法的收敛性,需要先引入 Lipschitz continuous 假设,即
∣ f ( x ) − f ( y ) ∣ ≤ G ∥ x − y ∥ 2 ∀ x , y |f(x)-f(y)| \leq G\|x-y\|_{2} \quad \forall x, y ∣f(x)−f(y)∣≤G∥x−y∥2∀x,y
这等价于 ∥ g ∥ 2 ≤ G \Vert g\Vert_2\le G ∥g∥2≤G 对任意 g ∈ ∂ f ( x ) g\in\partial f(x) g∈∂f(x) 都成立。
在分析收敛性之前,我们需要引入一个非常重要的式子⬇️!!!在后面的分析中会一直用到:
∥ x + − x ⋆ ∥ 2 2 = ∥ x − t g − x ⋆ ∥ 2 2 = ∥ x − x ⋆ ∥ 2 2 − 2 t g T ( x − x ⋆ ) + t 2 ∥ g ∥ 2 2 ≤ ∥ x − x ⋆ ∥ 2 2 − 2 t ( f ( x ) − f ⋆ ) + t 2 ∥ g ∥ 2 2 \begin{aligned} \left\|x^{+}-x^{\star}\right\|_{2}^{2} &=\left\|x-t g-x^{\star}\right\|_{2}^{2} \\ &=\left\|x-x^{\star}\right\|_{2}^{2}-2 t g^{T}\left(x-x^{\star}\right)+t^{2}\|g\|_{2}^{2} \\ & \leq\left\|x-x^{\star}\right\|_{2}^{2}-2 t\left(f(x)-f^{\star}\right)+t^{2}\|g\|_{2}^{2} \end{aligned} ∥∥x+−x⋆∥∥22=∥x−tg−x⋆∥22=∥x−x⋆∥22−2tgT(x−x⋆)+t2∥g∥22≤∥x−x⋆∥22−2t(f(x)−f⋆)+t2∥g∥22
那么如果定义 f b e s t ( k ) = min 0 ≤ i < k f ( x ( i ) ) f_{\mathrm{best}}^{(k)}=\min _{0 \leq i
2 ( ∑ i = 1 k t i ) ( f best ( k ) − f ⋆ ) ≤ ∥ x ( 0 ) − x ⋆ ∥ 2 2 − ∥ x ( k ) − x ⋆ ∥ 2 2 + ∑ i = 1 k t i 2 ∥ g ( i − 1 ) ∥ 2 2 ≤ ∥ x ( 0 ) − x ⋆ ∥ 2 2 + ∑ i = 1 k t i 2 ∥ g ( i − 1 ) ∥ 2 2 \begin{aligned} 2\left(\sum_{i=1}^{k} t_{i}\right)\left(f_{\text {best }}^{(k)}-f^{\star}\right) & \leq\left\|x^{(0)}-x^{\star}\right\|_{2}^{2}-\left\|x^{(k)}-x^{\star}\right\|_{2}^{2}+\sum_{i=1}^{k} t_{i}^{2}\left\|g^{(i-1)}\right\|_{2}^{2} \\ & \leq\left\|x^{(0)}-x^{\star}\right\|_{2}^{2}+\sum_{i=1}^{k} t_{i}^{2}\left\|g^{(i-1)}\right\|_{2}^{2} \end{aligned} 2(i=1∑kti)(fbest (k)−f⋆)≤∥∥∥x(0)−x⋆∥∥∥22−∥∥∥x(k)−x⋆∥∥∥22+i=1∑kti2∥∥∥g(i−1)∥∥∥22≤∥∥∥x(0)−x⋆∥∥∥22+i=1∑kti2∥∥∥g(i−1)∥∥∥22
根据上面的式子,就可以得到对于
Fixed step size: t i = t t_i=t ti=t
f best ( k ) − f ⋆ ≤ ∥ x ( 0 ) − x ⋆ ∥ 2 2 2 k t + G 2 t 2 f_{\text {best }}^{(k)}-f^{\star} \leq \frac{\left\|x^{(0)}-x^{\star}\right\|_{2}^{2}}{2 k t}+\frac{G^{2} t}{2} fbest (k)−f⋆≤2kt∥∥x(0)−x⋆∥∥22+2G2t
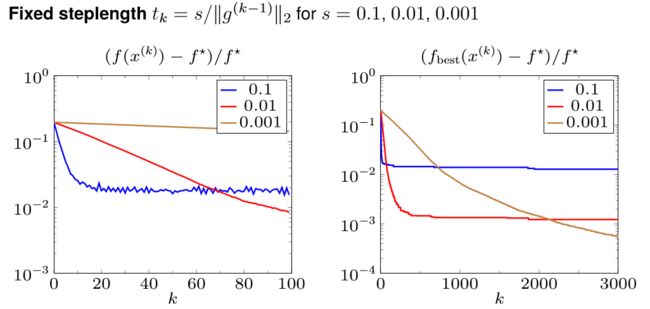
Fixed step length: t i = s / ∥ g ( i − 1 ) ∥ 2 t_{i}=s /\left\|g^{(i-1)}\right\|_{2} ti=s/∥∥g(i−1)∥∥2
f best ( k ) − f ⋆ ≤ G ∥ x ( 0 ) − x ⋆ ∥ 2 2 2 k s + G s 2 f_{\text {best }}^{(k)}-f^{\star} \leq \frac{G\left\|x^{(0)}-x^{\star}\right\|_{2}^{2}}{2 k s}+\frac{G s}{2} fbest (k)−f⋆≤2ksG∥∥x(0)−x⋆∥∥22+2Gs
这两个式子中的第一项都随着 k k k 增大而趋于 0,但第二项却没有办法消掉,也就是与最优解的误差不会趋于 0。并且他们有一个微妙的不同点在于,fixed step size 情况下 G 2 t / 2 ∼ O ( G 2 ) , G s / 2 ∼ O ( G ) G^2t/2\sim O(G^2),Gs/2\sim O(G) G2t/2∼O(G2),Gs/2∼O(G), G G G 一般是较大的。
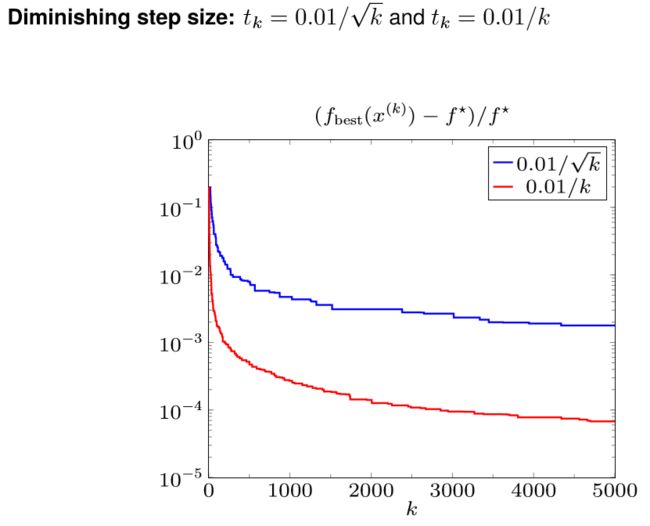
Diminishing step size: t k → 0 , ∑ k = 1 ∞ t k = ∞ t_{k} \rightarrow 0, \sum_{k=1}^{\infty} t_{k}=\infty tk→0,∑k=1∞tk=∞
f best ( k ) − f ⋆ ≤ ∥ x ( 0 ) − x ⋆ ∥ 2 2 + G 2 ∑ i = 1 k t i 2 2 ∑ i = 1 k t i f_{\text {best }}^{(k)}-f^{\star} \leq \frac{\left\|x^{(0)}-x^{\star}\right\|_{2}^{2}+G^{2} \sum_{i=1}^{k} t_{i}^{2}}{2 \sum_{i=1}^{k} t_{i}} fbest (k)−f⋆≤2∑i=1kti∥∥x(0)−x⋆∥∥22+G2∑i=1kti2
可以证明, ( ∑ i = 1 k t i 2 ) / ( ∑ i = 1 k t i ) → 0 \left(\sum_{i=1}^{k} t_{i}^{2}\right) /\left(\sum_{i=1}^{k} t_{i}\right) \rightarrow 0 (∑i=1kti2)/(∑i=1kti)→0,因此 f best ( k ) f_{\text {best }}^{(k)} fbest (k) 会收敛于 f ⋆ f^\star f⋆。
下面看几幅图片,对于优化问题 min ∥ A x − b ∥ 1 \min\Vert Ax-b\Vert_1 min∥Ax−b∥1
| Fixed step length | Diminishing step size |
|---|---|
 |
 |
前面考虑了固定步长的情况,假设现在我们固定总的迭代次数为 k k k,可不可以优化步长 s s s 的大小来尽可能使 f best ( k ) f_\text{best}^{(k)} fbest(k) 接近 f ⋆ f^\star f⋆ 呢?这实际上可以表示为优化问题
f best ( k ) − f ⋆ ≤ R 2 + ∑ i = 1 k s i 2 2 ∑ i = 1 k s i / G ⟹ min s R 2 2 k s / G + s 2 / G f_{\text {best }}^{(k)}-f^{\star} \leq \frac{R^{2}+\sum_{i=1}^{k} s_{i}^{2}}{2 \sum_{i=1}^{k} s_{i}/G} \Longrightarrow \min_s \frac{R^{2}}{2 ks/G}+\frac{s}{2/G} fbest (k)−f⋆≤2∑i=1ksi/GR2+∑i=1ksi2⟹smin2ks/GR2+2/Gs
其中 R = ∥ x ( 0 ) − x ⋆ ∥ 2 R=\left\|x^{(0)}-x^{\star}\right\|_{2} R=∥∥x(0)−x⋆∥∥2,那么最优步长为 s = R / k s=R/\sqrt{k} s=R/k,此时
f best ( k ) − f ⋆ ≤ G R k f_{\text {best }}^{(k)}-f^{\star} \leq \frac{GR}{\sqrt{k}} fbest (k)−f⋆≤kGR
因此收敛速度为 O ( 1 / k ) O(1/\sqrt{k}) O(1/k),对比之前光滑函数的梯度下降,收敛速度为 O ( 1 / k ) O(1/k) O(1/k)。
我们对前面的收敛速度并不满意,如果有更多的信息,比如已知最优解 f ⋆ f^\star f⋆ 的大小,能不能改进收敛速度呢?根据前面的式子,有
∥ x + − x ⋆ ∥ 2 2 ≤ ∥ x − x ⋆ ∥ 2 2 − 2 t i ( f ( x ) − f ⋆ ) + t i 2 ∥ g ∥ 2 2 \left\|x^{+}-x^{\star}\right\|_{2}^{2} \leq\left\|x-x^{\star}\right\|_{2}^{2}-2 t_i\left(f(x)-f^{\star}\right)+t_i^{2}\|g\|_{2}^{2} ∥∥x+−x⋆∥∥22≤∥x−x⋆∥22−2ti(f(x)−f⋆)+ti2∥g∥22
这实际上是关于 t i t_i ti 的一个二次函数,因此可以取 t i = f ( x ( i − 1 ) ) − f ⋆ ∥ g ( i − 1 ) ∥ 2 2 t_{i}=\frac{f\left(x^{(i-1)}\right)-f^{\star}}{\left\|g^{(i-1)}\right\|_{2}^{2}} ti=∥g(i−1)∥22f(x(i−1))−f⋆,就可以得到
f best ( k ) − f ⋆ ≤ G R k f_{\text {best }}^{(k)}-f^{\star} \leq \frac{GR}{\sqrt{k}} fbest (k)−f⋆≤kGR
可见还是没有改进收敛速度。
如果引入强凸性质呢?如果假设满足 μ \mu μ 强凸,则 f ⋆ ≥ f k + g k T ( x k − x ⋆ ) + μ / 2 ∥ x k − x ⋆ ∥ 2 2 f^\star \ge f^k+g^{kT}(x^k-x^\star)+\mu/2\Vert x^k-x^\star\Vert_2^2 f⋆≥fk+gkT(xk−x⋆)+μ/2∥xk−x⋆∥22,可以取 t k = 2 μ ( k + 1 ) t_k=\frac{2}{\mu(k+1)} tk=μ(k+1)2,那么就可以得到
f best ( k ) − f ⋆ ≤ 2 G 2 μ ( k + 1 ) f_{\text {best }}^{(k)}-f^{\star} \leq \frac{2G^2}{\mu(k+1)} fbest (k)−f⋆≤μ(k+1)2G2
最后给我的博客打个广告,欢迎光临
https://glooow1024.github.io/
https://glooow.gitee.io/
前面的一些博客链接如下
凸优化专栏
凸优化学习笔记 1:Convex Sets
凸优化学习笔记 2:超平面分离定理
凸优化学习笔记 3:广义不等式
凸优化学习笔记 4:Convex Function
凸优化学习笔记 5:保凸变换
凸优化学习笔记 6:共轭函数
凸优化学习笔记 7:拟凸函数 Quasiconvex Function
凸优化学习笔记 8:对数凸函数
凸优化学习笔记 9:广义凸函数
凸优化学习笔记 10:凸优化问题
凸优化学习笔记 11:对偶原理
凸优化学习笔记 12:KKT条件
凸优化学习笔记 13:KKT条件 & 互补性条件 & 强对偶性
凸优化学习笔记 14:SDP Representablity
凸优化学习笔记 15:梯度方法
凸优化学习笔记 16:次梯度
凸优化学习笔记 17:次梯度下降法