- ur5在gazebo中仿真的官方源码浅析
Ecalpal
机器人其他
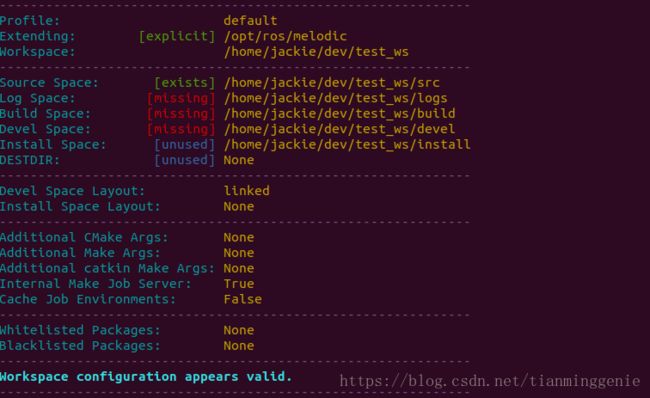
一复现好久之前初学ros+gazebo机械臂仿真的时候总有些懵,用的是ur5机械臂,现在回过头来看好像看懂了一些,故重新理清了一下功能包的逻辑,方便查阅。官方源码本文参考ubuntu16.04安装UR3/UR5/UR10机械臂的ROS驱动并实现gazebo下Moveit运动规划仿真以及真实UR3机械臂的运动控制(1)1.1roslaunchur_gazebour5.launch1.1.1找gaze
- 本地存储之window.sessionStorage和window.localStorage
程序员Syoyu
javascript
1.window.sessionStorage(1).生命周期为关闭浏览器窗口(关闭浏览器之后,所存储的数据也就随之清空)(2).以键值对形式存取使用(3).在同一窗口(页面)下数据可以共享//存储数据sessionStorage.setItem(key,val)//获取数据sessionStorage.getItem(key)//删除数据sessionStorage.removeItem(key
- 转2021-07-17
c633b5ae684a
大家好,我是你们可爱的小智。最近关于moveit相关的问题感觉非常多,毕竟机械臂+视觉的应用的确是非常的火爆,小智都想直接开课教机械臂运动规划相关的了。有的同学问小智,怎么使用moveit控制真实机械臂呢?小智对这个还是非常有经验的,小智曾经从silidworkds模型开始,使用moveit完成对真实机械臂的运动规划。想要了解怎么做的,可以关注小智。小智准备从solidworks模型导出urdf开
- react-rnd 实现拖拽移动。放大缩小功能
不7而遇_
react实现鼠标拖拽移动我们可以引入一个组件是react-rnd即通常的引用npmireact-rnd-S安装后引用就可以了import{Rnd}from'react-rnd'用的时候只需要在想要被拖动的内容外面套上标签就可以了如(尴尬了这个markdown不识别箭头函数)this.moveItem(e,d,item)}onResizeStop={(e,direction,ref,delta,p
- ros2启动文件.launch.py中的moveit_config
嘟嘟灵兮
ros2launch机器人开发moveit
看启动文件时,初看觉得简单,但仔细斟酌,找对应的路径时,发现文件对不上号,此篇以官方教程给出的move_group.launch.py为例,记录文件对应关系moveit_configmoveit_config=(MoveItConfigsBuilder("moveit_resources_panda").robot_description(file_path="config/panda.urdf.
- 浏览器缓存方法 localStorage
Mihansy
设置缓存localStorage.setItem(key,value)获取缓存localStorage.getItem(key)删除缓存localStorage.removeItem(key)
- 动态修改地址栏传参数
啧啧静
前端vue.js
使用场景在获取接口数据后,拿到获取到得值,赋值给地址栏,并使页面不刷新方法一:使用本地存储如果所需要得数据是其他页面获取到得,可以存在本地,拿到之后将其移除掉constid=JSON.parse(localStorage.getItem('id'))if(id){localStorage.removeItem('id')consturl=newURL(location.href);url.sear
- 搭建仿真环境玩转ROS机械臂
学吧!少年!
ubuntu机器人
1.ROS中的控制器插件2.完善机器人模型显示隐藏文件,方法:ctrl+H3.构建MoveIt!+Gazebo仿真4.小结
- MoveIt!深入
学吧!少年!
linuxubuntu机器人
1.圆弧轨迹规划2.轨迹重定义3.多轨迹连续运动4.更换运动学插件安装trac-ik5.小结
- 睿尔曼6自由度机械臂ROS驱动包功能拓展之查询指令
睿尔曼学院
机器人
1:主要环境预览1:系统:Ubuntu20.042:ROS:noetic3:对于系统要求需根据相关手册完成机械臂相关依赖安装,能够运行机械臂本身基本功能,包括moveit。4:准备资料,完成功能拓展我们需要依赖以下资料《睿尔曼6自由度机械臂JSON通信协议v3.5.3》。2:添加ROS机械臂驱动包功能说明机械臂内部有许多的指令,可将其分为三类。首先是设置,通俗的理解就是通过一些设置指令改变机械臂的
- localstorage de yongfa
LinDaiuuj
udp网络协议网络
1.**设置一个项目**```javascriptlocalStorage.setItem("myCat","Whiskers");```2.**获取一个项目**```javascriptletmyCat=localStorage.getItem("myCat");```3.**删除一个项目**```javascriptlocalStorage.removeItem("myCat");```4.*
- 睿尔曼超轻量仿人机械臂-ROS第一篇 启动机械臂的Moveit
睿尔曼学院
机器人人工智能智能硬件经验分享
本文主要讲述了睿尔曼六轴机械臂在ROS中的功能包配置,及如何根据文件启动Moveit做仿真。文中涉及的机械臂ROS包已存放网盘,链接如下:链接:https://pan.baidu.com/s/1LC0SsoRJ-HOHcFXkN0I1cQ?pwd=xk8f提取码:xk8f目录1.机械臂ROS包介绍2.使用前环境准备3.源码的安装编译4.在rviz中显示机械臂模型4.1机器人描述功能包4.2在rvi
- 睿尔曼超轻量仿人机械臂ROS系列-ROS第二篇 使用Moveit控制Gazebo中的机械臂
睿尔曼学院
机器人智能硬件经验分享人工智能
目录简介配置说明6.2仿真与真实机械臂配置6.2.1MoveIt!端的配置6.2.2机器人端的配置6.2.3启动文件arm_65_bringup_moveit.launch6.3运行效果简介MoveIt!与Gazebo的联合仿真,其主要思路为搭建ros_control和MoveIt!的桥梁。先在MoveIt!端配置关节和传感器接口yaml文件,将其加载到rviz端;再在机器人端配置ros_cont
- mariadb-server : Depends: mariadb-server-10.3 (>= 1:10.3.25-0ubuntu0.20.04.1)
marytime
mariadb数据库
Ifyouhaveinstalledmysql,removeitandgiveitatry.itworkedinmyscenario.sudoapt-getremove--purgemysql-servermysql-clientmysql-commonsudoapt-getautoremovesudoapt-getautocleanTHISWILLWIPEALLYOUREXISTINGDATAB
- JavaScript进阶:WebAPIs重点知识整理3
是小蟹呀^
JavaScriptjavascript
1本地存储存储容量大:约5M1.1localStorage1.1.1存储localStorage.setItem('username','张三')localStorage.setItem('password','123456')1.1.2获取console.log(localStorage.getItem('username'))1.1.3删除localStorage.removeItem('us
- 学习Flutter的第九天
囧rg
5.动画5.1AnimatedList一个滚动容器,可以为item被插入或移除时添加动画效果。列表数据的插入和删除有进出场动画需要调用AnimatedListState指定的方法,只删除原数据并调用setState方法是没有动画效果的。nimatedListState.insertItem或AnimatedListState.removeItem并不会更新实际数据,需要手动处理。import'da
- localstroage用法
咸鱼起码是条鱼
Jsjavascript
注意:localStorage只能存储字符串格式,几乎支持大部分浏览器不用考虑IE8的问题大小为5M存储localstroage.setItem(‘openid’,‘ksjhfkjajkdfjkszdjfksad’);获取varopenid=localstroage.getItem(‘openid’);删除某个值localstroage.removeItem(‘openid’);删除所有值loca
- 2023年最具影响力的十大网络安全事件,文件销毁,数据销毁,保密销毁,物料销毁,回收电脑 硬盘销毁
文件销毁硬盘销毁海龙
运维安全网络前端大数据
被业内人士定性为网络安全“灾年”的2023年已经翻篇,但过去一年发生的创记录的数据泄露、勒索软件、零日漏洞、间谍软件和供应链攻击事件已经为2024年全球网络安全威胁态势定下了主旋律和基调。以下我们将回顾各行业2023年最具影响力和破坏力的十大网络安全事件,回顾并总结这些事件将是2024年伊始网络安全专业人士制订风险管理策略和目标的重要参考:一、杀伤半径最大的供应链攻击:MOVEitTransfer
- ROS+moveit+jakaminicob仿真运动
drivenzyw
机器人
先浅浅的放一个官方的c++文档:MotionPlanningAPI—moveit_tutorialsMelodicdocumentation目录一、实现运动到目标点的程序二、在rviz里面新建扫描平台一、实现运动到目标点的程序(等我得空了补一个c++运行环境部署说明)#include#include#include#include#include#include#include#include#i
- docker镜像自动部署,关闭删除现有容器和镜像的shell脚本
沉思的雨季
1、添加本地docker容器和镜像自动清理脚本CleanDocker.sh。脚本如下:#!/bin/#定义镜像和容器的名称name=frontapp#判断是否容器存在dockerps-a|grep$name&>/dev/null#如果存在,关闭并删除该容器if[$?-eq0]thenecho$name"isup,wewillstopandremoveit!!!"dockerstop$namedoc
- 不用moveit控制ur5e机械臂
chch2010523
ros经验分享
参考:https://blog.csdn.net/gyxx1998/article/details/119351029?spm=1001.2014.3001.5506代码总结#bash1roslaunchsmartcar_descriptionscout_with_laser_gazebo.launch#bash2rosrunsmartcar_descriptionsendposition.pys
- ROS下移动机械臂导航与Moveit!抓取仿真实现
EaSon王同学
rosmoveit
作者-杭州电子科技大学智能机器人实验室ROS下移动机械臂导航与Moveit!抓取仿真实现URDF模型链接:(一)URDF模型组合(二)导航配置(三)机械臂配置1.Moveit!assistant配置参数2.文件修改(1)创建关节轨迹文件(2)创建关节轨迹加载文件(3)创建controller_gazebo文件(4)修改Moveit配置的config包里的launch文件(5)创建关节状态控制文件(
- ros gazebo机械臂仿真,手动控制与MoveIt自动控制
河北一帆
机器人
本文总结归纳古月居胡春旭ros机械臂教程,给出了一些error的解决方法,补充了通过python运行moveit。十分建议去看githubhuchunxu源代码的repository。创建机械臂的xacro模型首先创建一个工作空间,在工作空间中创建arm_description功能包。功能包中创建一个urdf文件夹,放入机械臂模型文件arm.xacroGazebo/WhiteGazebo/Whit
- windows下使用FCL(Flexible-collision-library)
深一
FCL碰撞检测
windows下使用FCL(TheFlexible-collision-library) FCL做为一款开源的碰撞检测库,支持多种基础的几何体,及支持C++和python,在windows和linux平台均可以使用。是一款计算高效的碰撞检测工具。在机械臂规划控制框架moveit中做为基础的碰撞检测算法。FCL支持的几何体类型:box(长方体)sphere(球)ellipsoid(椭球)capsu
- 2023年最具影响力的十大网络安全事件
廾匸0705
网络安全web安全安全
✦Event.1...杀伤半径最大的供应链攻击:✦MOVEitTransfer数据盗窃攻击据Emsisoft报道,文件传输服务MOVEit的漏洞已经导致2706个组织遭到(勒索软件)攻击,超过9300万人的个人数据被泄露。MOVEitTransfer是由美国ProgressSoftwareCorporation子公司Ipswitch开发的托管文件传输(MFT)解决方案,允许企业使用SFTP、SCP
- ROS MoveIt!
K-Liberty
机器人人工智能c++
MoveIt!是一个用于ROS的开源运动规划库,提供多种功能,包括用于运动规划的快速逆运动学分析、用于操纵的高级算法、机械手控制、动力学、控制器和运动规划。(通过提供一个GUI来协助MoveIt!所需的各种设置,它允许使用RViz进行视觉反馈。)MoveIt!组件和模块:MoveGroup:这是MoveIt!的核心节点,负责管理和执行运动规划任务。它提供了许多服务和动作接口供用户调用。Planni
- ROS仿真R2机器人之安装运行及MoveIt的介绍
寅恪光潜
机器人操作系统(ROS)QuaternionMoveItmove_groupGAZEBO
R2(Robonaut2)是NASA美国宇航局与GM通用联合推出的宇航人形机器人,能在国际空间站使用,可想而知其价格是非常昂贵,几百万美刀吧,还好NASA发布了一个R2机器人的Gazebo模型,使用模型就不需要花钱了,由于我们的机器人软件通常是不依赖于具体机器人的,所以在R2学到的东西也可以应用到其他的机器人身上,所以我们在仿真平台上来操作它。1、安装R2机器人1.1、OS版本使用的是虚拟机上的一
- JS本地持久化
duration~
前端javascript开发语言ecmascript
要将数据持久化到本地存储中,可以使用浏览器提供的localStorage或indexedDB等机制。下面分别介绍这两种方式的用法:使用localStorage://存储数据localStorage.setItem('key','value');//获取数据constdata=localStorage.getItem('key');//删除数据localStorage.removeItem('key
- RecyclerView将某个item移动到底部
Steve_XiaoHai
基础控件android
获取要移动的item的数据对象。从数据集中删除该item。将该item添加到数据集的底部。调用notifyItemMoved通知适配器进行移动。//移动item到底部的方法publicvoidmoveItemToBottom(intposition){if(position=dataList.size()){return;}//获取要移动的item数据YourDataitemToMove=data
- 机械臂仿真程序记录贴(2)
drivenzyw
ubuntu
一、新建功能包catkin_create_pkgmotion_planningrospyroscppstd_msgs二、vscode打开code./三、新建cpp文件来规划路径(看官方文档吧)MoveGroupC++Interface—moveit_tutorialsMelodicdocumentation这个是c++版本的↑,主要看他给你推的那个参考包里面有不同的demo,仿照它写就好
- JAVA中的Enum
周凡杨
javaenum枚举
Enum是计算机编程语言中的一种数据类型---枚举类型。 在实际问题中,有些变量的取值被限定在一个有限的范围内。 例如,一个星期内只有七天 我们通常这样实现上面的定义:
public String monday;
public String tuesday;
public String wensday;
public String thursday
- 赶集网mysql开发36条军规
Bill_chen
mysql业务架构设计mysql调优mysql性能优化
(一)核心军规 (1)不在数据库做运算 cpu计算务必移至业务层; (2)控制单表数据量 int型不超过1000w,含char则不超过500w; 合理分表; 限制单库表数量在300以内; (3)控制列数量 字段少而精,字段数建议在20以内
- Shell test命令
daizj
shell字符串test数字文件比较
Shell test命令
Shell中的 test 命令用于检查某个条件是否成立,它可以进行数值、字符和文件三个方面的测试。 数值测试 参数 说明 -eq 等于则为真 -ne 不等于则为真 -gt 大于则为真 -ge 大于等于则为真 -lt 小于则为真 -le 小于等于则为真
实例演示:
num1=100
num2=100if test $[num1]
- XFire框架实现WebService(二)
周凡杨
javawebservice
有了XFire框架实现WebService(一),就可以继续开发WebService的简单应用。
Webservice的服务端(WEB工程):
两个java bean类:
Course.java
package cn.com.bean;
public class Course {
private
- 重绘之画图板
朱辉辉33
画图板
上次博客讲的五子棋重绘比较简单,因为只要在重写系统重绘方法paint()时加入棋盘和棋子的绘制。这次我想说说画图板的重绘。
画图板重绘难在需要重绘的类型很多,比如说里面有矩形,园,直线之类的,所以我们要想办法将里面的图形加入一个队列中,这样在重绘时就
- Java的IO流
西蜀石兰
java
刚学Java的IO流时,被各种inputStream流弄的很迷糊,看老罗视频时说想象成插在文件上的一根管道,当初听时觉得自己很明白,可到自己用时,有不知道怎么代码了。。。
每当遇到这种问题时,我习惯性的从头开始理逻辑,会问自己一些很简单的问题,把这些简单的问题想明白了,再看代码时才不会迷糊。
IO流作用是什么?
答:实现对文件的读写,这里的文件是广义的;
Java如何实现程序到文件
- No matching PlatformTransactionManager bean found for qualifier 'add' - neither
林鹤霄
java.lang.IllegalStateException: No matching PlatformTransactionManager bean found for qualifier 'add' - neither qualifier match nor bean name match!
网上找了好多的资料没能解决,后来发现:项目中使用的是xml配置的方式配置事务,但是
- Row size too large (> 8126). Changing some columns to TEXT or BLOB
aigo
column
原文:http://stackoverflow.com/questions/15585602/change-limit-for-mysql-row-size-too-large
异常信息:
Row size too large (> 8126). Changing some columns to TEXT or BLOB or using ROW_FORMAT=DYNAM
- JS 格式化时间
alxw4616
JavaScript
/**
* 格式化时间 2013/6/13 by 半仙
[email protected]
* 需要 pad 函数
* 接收可用的时间值.
* 返回替换时间占位符后的字符串
*
* 时间占位符:年 Y 月 M 日 D 小时 h 分 m 秒 s 重复次数表示占位数
* 如 YYYY 4占4位 YY 占2位<p></p>
* MM DD hh mm
- 队列中数据的移除问题
百合不是茶
队列移除
队列的移除一般都是使用的remov();都可以移除的,但是在昨天做线程移除的时候出现了点问题,没有将遍历出来的全部移除, 代码如下;
//
package com.Thread0715.com;
import java.util.ArrayList;
public class Threa
- Runnable接口使用实例
bijian1013
javathreadRunnablejava多线程
Runnable接口
a. 该接口只有一个方法:public void run();
b. 实现该接口的类必须覆盖该run方法
c. 实现了Runnable接口的类并不具有任何天
- oracle里的extend详解
bijian1013
oracle数据库extend
扩展已知的数组空间,例:
DECLARE
TYPE CourseList IS TABLE OF VARCHAR2(10);
courses CourseList;
BEGIN
-- 初始化数组元素,大小为3
courses := CourseList('Biol 4412 ', 'Psyc 3112 ', 'Anth 3001 ');
--
- 【httpclient】httpclient发送表单POST请求
bit1129
httpclient
浏览器Form Post请求
浏览器可以通过提交表单的方式向服务器发起POST请求,这种形式的POST请求不同于一般的POST请求
1. 一般的POST请求,将请求数据放置于请求体中,服务器端以二进制流的方式读取数据,HttpServletRequest.getInputStream()。这种方式的请求可以处理任意数据形式的POST请求,比如请求数据是字符串或者是二进制数据
2. Form
- 【Hive十三】Hive读写Avro格式的数据
bit1129
hive
1. 原始数据
hive> select * from word;
OK
1 MSN
10 QQ
100 Gtalk
1000 Skype
2. 创建avro格式的数据表
hive> CREATE TABLE avro_table(age INT, name STRING)STORE
- nginx+lua+redis自动识别封解禁频繁访问IP
ronin47
在站点遇到攻击且无明显攻击特征,造成站点访问慢,nginx不断返回502等错误时,可利用nginx+lua+redis实现在指定的时间段 内,若单IP的请求量达到指定的数量后对该IP进行封禁,nginx返回403禁止访问。利用redis的expire命令设置封禁IP的过期时间达到在 指定的封禁时间后实行自动解封的目的。
一、安装环境:
CentOS x64 release 6.4(Fin
- java-二叉树的遍历-先序、中序、后序(递归和非递归)、层次遍历
bylijinnan
java
import java.util.LinkedList;
import java.util.List;
import java.util.Stack;
public class BinTreeTraverse {
//private int[] array={ 1, 2, 3, 4, 5, 6, 7, 8, 9 };
private int[] array={ 10,6,
- Spring源码学习-XML 配置方式的IoC容器启动过程分析
bylijinnan
javaspringIOC
以FileSystemXmlApplicationContext为例,把Spring IoC容器的初始化流程走一遍:
ApplicationContext context = new FileSystemXmlApplicationContext
("C:/Users/ZARA/workspace/HelloSpring/src/Beans.xml&q
- [科研与项目]民营企业请慎重参与军事科技工程
comsci
企业
军事科研工程和项目 并非要用最先进,最时髦的技术,而是要做到“万无一失”
而民营科技企业在搞科技创新工程的时候,往往考虑的是技术的先进性,而对先进技术带来的风险考虑得不够,在今天提倡军民融合发展的大环境下,这种“万无一失”和“时髦性”的矛盾会日益凸显。。。。。。所以请大家在参与任何重大的军事和政府项目之前,对
- spring 定时器-两种方式
cuityang
springquartz定时器
方式一:
间隔一定时间 运行
<bean id="updateSessionIdTask" class="com.yang.iprms.common.UpdateSessionTask" autowire="byName" />
<bean id="updateSessionIdSchedule
- 简述一下关于BroadView站点的相关设计
damoqiongqiu
view
终于弄上线了,累趴,戳这里http://www.broadview.com.cn
简述一下相关的技术点
前端:jQuery+BootStrap3.2+HandleBars,全站Ajax(貌似对SEO的影响很大啊!怎么破?),用Grunt对全部JS做了压缩处理,对部分JS和CSS做了合并(模块间存在很多依赖,全部合并比较繁琐,待完善)。
后端:U
- 运维 PHP问题汇总
dcj3sjt126com
windows2003
1、Dede(织梦)发表文章时,内容自动添加关键字显示空白页
解决方法:
后台>系统>系统基本参数>核心设置>关键字替换(是/否),这里选择“是”。
后台>系统>系统基本参数>其他选项>自动提取关键字,这里选择“是”。
2、解决PHP168超级管理员上传图片提示你的空间不足
网站是用PHP168做的,反映使用管理员在后台无法
- mac 下 安装php扩展 - mcrypt
dcj3sjt126com
PHP
MCrypt是一个功能强大的加密算法扩展库,它包括有22种算法,phpMyAdmin依赖这个PHP扩展,具体如下:
下载并解压libmcrypt-2.5.8.tar.gz。
在终端执行如下命令: tar zxvf libmcrypt-2.5.8.tar.gz cd libmcrypt-2.5.8/ ./configure --disable-posix-threads --
- MongoDB更新文档 [四]
eksliang
mongodbMongodb更新文档
MongoDB更新文档
转载请出自出处:http://eksliang.iteye.com/blog/2174104
MongoDB对文档的CURD,前面的博客简单介绍了,但是对文档更新篇幅比较大,所以这里单独拿出来。
语法结构如下:
db.collection.update( criteria, objNew, upsert, multi)
参数含义 参数
- Linux下的解压,移除,复制,查看tomcat命令
y806839048
tomcat
重复myeclipse生成webservice有问题删除以前的,干净
1、先切换到:cd usr/local/tomcat5/logs
2、tail -f catalina.out
3、这样运行时就可以实时查看运行日志了
Ctrl+c 是退出tail命令。
有问题不明的先注掉
cp /opt/tomcat-6.0.44/webapps/g
- Spring之使用事务缘由(3-XML实现)
ihuning
spring
用事务通知声明式地管理事务
事务管理是一种横切关注点。为了在 Spring 2.x 中启用声明式事务管理,可以通过 tx Schema 中定义的 <tx:advice> 元素声明事务通知,为此必须事先将这个 Schema 定义添加到 <beans> 根元素中去。声明了事务通知后,就需要将它与切入点关联起来。由于事务通知是在 <aop:
- GCD使用经验与技巧浅谈
啸笑天
GC
前言
GCD(Grand Central Dispatch)可以说是Mac、iOS开发中的一大“利器”,本文就总结一些有关使用GCD的经验与技巧。
dispatch_once_t必须是全局或static变量
这一条算是“老生常谈”了,但我认为还是有必要强调一次,毕竟非全局或非static的dispatch_once_t变量在使用时会导致非常不好排查的bug,正确的如下: 1
- linux(Ubuntu)下常用命令备忘录1
macroli
linux工作ubuntu
在使用下面的命令是可以通过--help来获取更多的信息1,查询当前目录文件列表:ls
ls命令默认状态下将按首字母升序列出你当前文件夹下面的所有内容,但这样直接运行所得到的信息也是比较少的,通常它可以结合以下这些参数运行以查询更多的信息:
ls / 显示/.下的所有文件和目录
ls -l 给出文件或者文件夹的详细信息
ls -a 显示所有文件,包括隐藏文
- nodejs同步操作mysql
qiaolevip
学习永无止境每天进步一点点mysqlnodejs
// db-util.js
var mysql = require('mysql');
var pool = mysql.createPool({
connectionLimit : 10,
host: 'localhost',
user: 'root',
password: '',
database: 'test',
port: 3306
});
- 一起学Hive系列文章
superlxw1234
hiveHive入门
[一起学Hive]系列文章 目录贴,入门Hive,持续更新中。
[一起学Hive]之一—Hive概述,Hive是什么
[一起学Hive]之二—Hive函数大全-完整版
[一起学Hive]之三—Hive中的数据库(Database)和表(Table)
[一起学Hive]之四-Hive的安装配置
[一起学Hive]之五-Hive的视图和分区
[一起学Hive
- Spring开发利器:Spring Tool Suite 3.7.0 发布
wiselyman
spring
Spring Tool Suite(简称STS)是基于Eclipse,专门针对Spring开发者提供大量的便捷功能的优秀开发工具。
在3.7.0版本主要做了如下的更新:
将eclipse版本更新至Eclipse Mars 4.5 GA
Spring Boot(JavaEE开发的颠覆者集大成者,推荐大家学习)的配置语言YAML编辑器的支持(包含自动提示,