在Rviz中显示坐标系方法探究
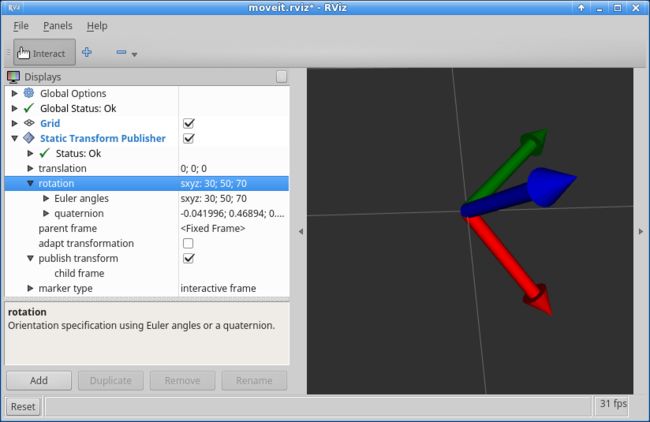
这个问题也算是一个历史遗留问题,之前在youbot的机械臂的夹子间添加了一个virtual joint,也算是添加一个坐标系了。但这个偏重于机器人模型方面的坐标。另外,在做机械臂的轨迹运动规划的时候,常常也需要显示点位,甚至是坐标系姿态。Rviz的插件中虽然也可以添加坐标系,如下图:
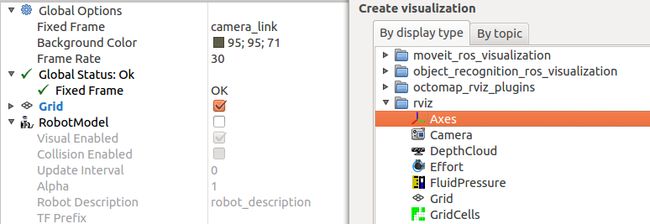
但是发现它的这个Axes只能添加Fixed Frame的坐标系,添加相对于其他坐标系的Axes会显示不出来。
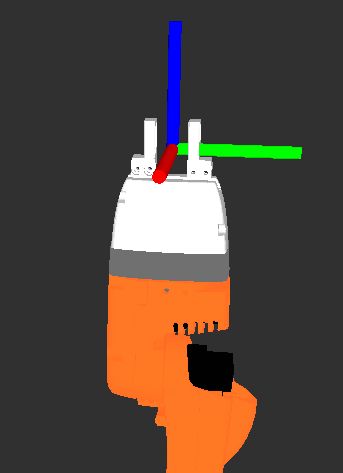
1. 虚拟关节
这部分内容在《ROS By Example Volume 2 Hydro》的第四章P136页有详细说明。截图是这样子
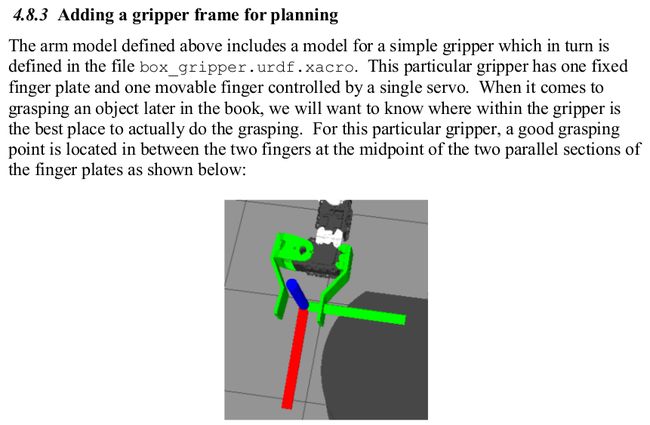
我自己试过如下,它侧重于模型的坐标系的建立,修改机器人的URDF 文件就好。
2. 显示坐标系
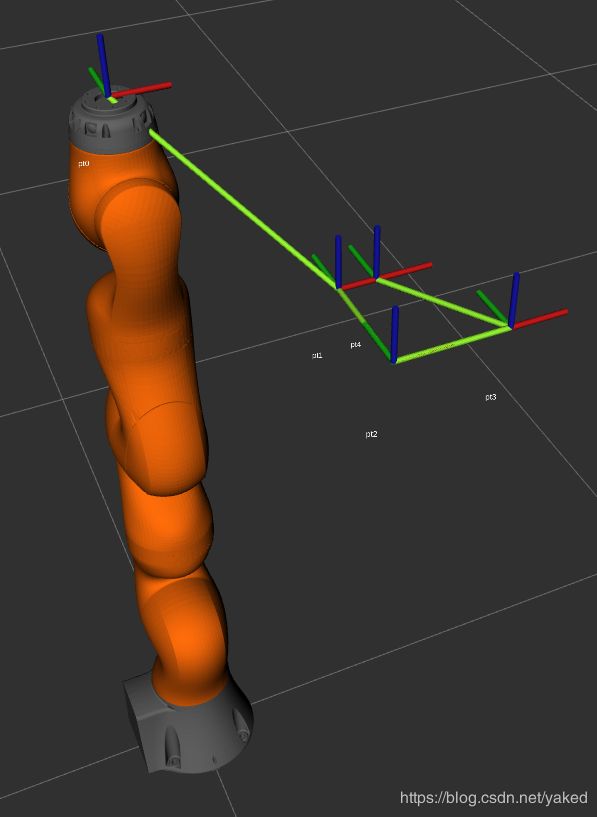
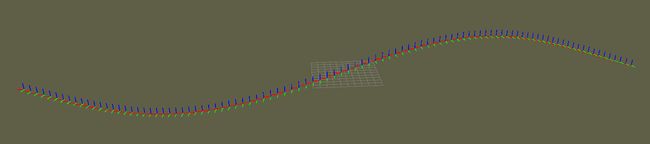
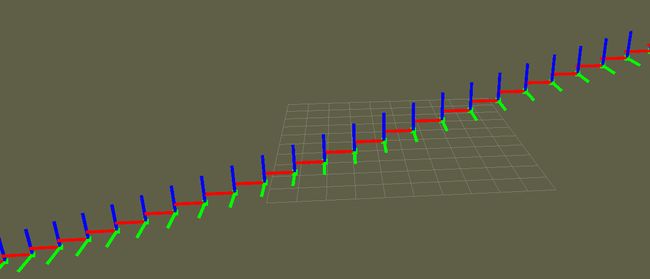
2.1 使用line list分别画出x,y,z轴
这里可以找到Riz所有的显示对象http://wiki.ros.org/rviz/DisplayTypes
参考官网这里的http://wiki.ros.org/rviz/Tutorials/Markers%3A%20Points%20and%20Lines
选用line list来画坐标系,分别画出x, y, z轴
// http://wiki.ros.org/rviz/Tutorials/Markers%3A%20Points%20and%20Lines
// The LINE_STRIP type uses each point as a vertex in a connected set of lines, where point 0 is connected to point 1, 1 to 2, 2 to 3, etc. The LINE_LIST type creates unconnected lines out of each pair of points, i.e. point 0 to 1, 2 to 3, etc.
#include
#include
#include
int main( int argc, char** argv )
{
ros::init(argc, argv, "points_and_lines");
ros::NodeHandle n;
ros::Publisher marker_pub = n.advertise("visualization_marker", 10);
ros::Rate r(30);
float f = 0.0;
while (ros::ok())
{
visualization_msgs::Marker points, line_strip, line_list_x,line_list_y, line_list_z;
points.header.frame_id = line_strip.header.frame_id = line_list_x.header.frame_id = line_list_y.header.frame_id =line_list_z.header.frame_id = "/base_link";
points.header.stamp = line_strip.header.stamp = line_list_x.header.stamp= line_list_y.header.stamp = line_list_z.header.stamp= ros::Time::now();
points.ns = line_strip.ns = line_list_x.ns= line_list_y.ns= line_list_z.ns = "points_and_lines";
points.action = line_strip.action = line_list_x.action = line_list_y.action =line_list_z.action =visualization_msgs::Marker::ADD;
points.pose.orientation.w = line_strip.pose.orientation.w = line_list_x.pose.orientation.w =line_list_y.pose.orientation.w =line_list_z.pose.orientation.w = 1.0;
points.id = 0;
line_strip.id = 1;
line_list_x.id = 2;
line_list_y.id = 3;
line_list_z.id = 4;
points.type = visualization_msgs::Marker::POINTS;
line_strip.type = visualization_msgs::Marker::LINE_STRIP;
line_list_x.type = visualization_msgs::Marker::LINE_LIST;
line_list_y.type = visualization_msgs::Marker::LINE_LIST;
line_list_z.type = visualization_msgs::Marker::LINE_LIST;
// POINTS markers use x and y scale for width/height respectively
points.scale.x = 0.2;
points.scale.y = 0.2;
// LINE_STRIP/LINE_LIST markers use only the x component of scale, for the line width
line_strip.scale.x = 0.1;
line_list_x.scale.x = 0.1;
line_list_y.scale.x = 0.1;
line_list_z.scale.x = 0.1;
// Points are green
points.color.g = 1.0f;
points.color.a = 1.0;
// Line strip is blue
line_strip.color.b = 1.0;
line_strip.color.a = 1.0;
// Line list is red
line_list_x.color.r = 1.0;
line_list_x.color.a = 1.0;
line_list_y.color.g = 1.0;
line_list_y.color.a = 1.0;
line_list_z.color.b = 1.0;
line_list_z.color.a = 1.0;
// Create the vertices for the points and lines
for (uint32_t i = 0; i < 100; ++i)
{
float y = 5 * sin(f + i / 100.0f * 2 * M_PI);
float z = 5 * cos(f + i / 100.0f * 2 * M_PI);
geometry_msgs::Point p;
p.x = (int32_t)i - 50;
p.y = y;
p.z = z;
points.points.push_back(p);
// line_strip.points.push_back(p);
// The line list needs two points for each line
line_list_z.points.push_back(p);
p.z += 1.0;
line_list_z.points.push_back(p);
p.z -= 1.0;
line_list_y.points.push_back(p);
p.y += 1.0;
line_list_y.points.push_back(p);
p.y -= 1.0;
line_list_x.points.push_back(p);
p.x += 1.0;
line_list_x.points.push_back(p);
}
marker_pub.publish(points);
marker_pub.publish(line_strip);
marker_pub.publish(line_list_x);
marker_pub.publish(line_list_y);
marker_pub.publish(line_list_z);
r.sleep();
f += 0.04;
}
}
2.2 使用posestamped
// http://wiki.ros.org/rviz/Tutorials/Markers%3A%20Points%20and%20Lines
// The LINE_STRIP type uses each point as a vertex in a connected set of lines, where point 0 is connected to point 1, 1 to 2, 2 to 3, etc. The LINE_LIST type creates unconnected lines out of each pair of points, i.e. point 0 to 1, 2 to 3, etc.
#include
#include
#include
#include
#include
#include
#include
using namespace std;
std::vector &split(const std::string &s, char delim, std::vector &elems)
{
std::stringstream ss(s);
std::string item;
while (std::getline(ss, item, delim))
{
elems.push_back(item);
}
return elems;
}
std::vector split(const std::string &s, char delim)
{
std::vector elems;
split(s, delim, elems);
return elems;
}
int main( int argc, char** argv )
{
ros::init(argc, argv, "points_and_lines");
ros::NodeHandle n;
ros::Publisher marker_pub = n.advertise("joint_target_marker", 10);
ros::Publisher pose_pub = n.advertise("pose_marker", 10);
ros::Rate r(10);
string line;
ifstream myfile("/home/yake/catkin_ws/src/youbot_trajectory_ros/cartesian_target/cartesian_target.txt");
std::vector elems;
visualization_msgs::Marker points;
geometry_msgs::PoseStamped pose;
std::vector v_pose;
if (myfile.is_open())
{
cout << "Open file successfully."<header.frame_id= "/arm_link_0";
// pose->header.stamp=ros::Time::now();
// pose->pose.position = po.position;
// pose->pose.orientation = po.orientation;
pose.header.frame_id= "/arm_link_0";
v_pose.push_back (pose);
// pose_pub.publish(pose);
// marker_pub.publish(points);
}
myfile.close();
}else cout << "Unable to open file"<::iterator it = v_pose.begin ();
while (ros::ok())
{
points.header.frame_id = "/arm_link_0";
points.header.stamp = ros::Time::now();
points.ns = "joint_points_and_lines";
points.action = visualization_msgs::Marker::ADD;
points.id = 0;
points.type = visualization_msgs::Marker::POINTS;
// visualization_msgs::Marker::pose;
// POINTS markers use x and y scale for width/height respectively
points.scale.x = 0.02;
points.scale.y = 0.02;
points.scale.z = 0.0;
// Points are green
points.color.g = 1.0f;
points.color.a = 1.0;
marker_pub.publish(points);
for(size_t i=0; i
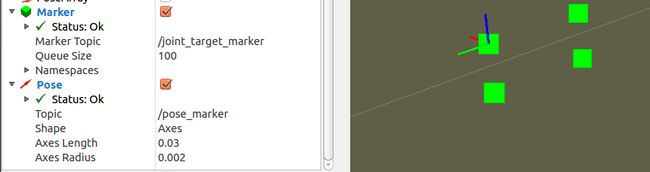
这个问题比较大,坐标系还是可以显示的,但是我需要显示的四个pose,但是发现pose更新速度较慢,坐标系是一个一个显示出来的,不知是否跟我pub有问题。这个pose跟points很不一样,读取本地文件的四个点位坐标后,points直接pushback保存了,而pose这个是没有的,因此我创建了一个Vector来存储pose。最后仿照points的方式,最后放在while循环里直接发布出去。
poseArray也试过了,不是我想要的那种效果, AMCL定位里看到的就是这种方式。http://wiki.ros.org/rviz/DisplayTypes/PoseArray

3.针对已有坐标系添加坐标转换关系
对于Kinect或Xtion,在启动驱动的时候会顺便启动自身的相机坐标系
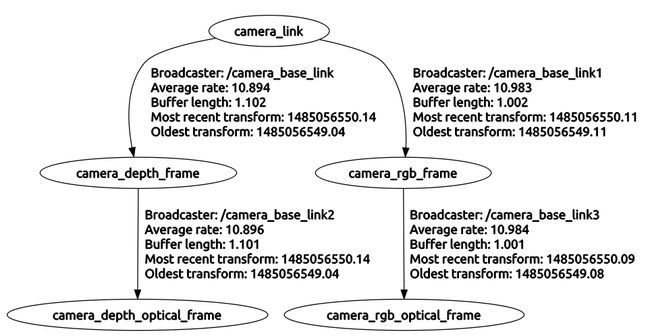
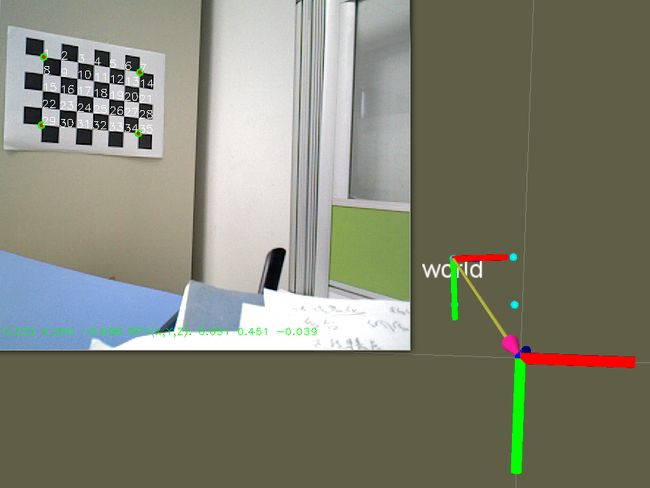
那如果说我通过特征点的识别与匹配,估算了相机的位置,知道其在世界坐标中的位置与姿态,想在rviz中显示出来。ROS 也提供了针对已有坐标系的转化关系
http://wiki.ros.org/tf/Tutorials/Adding%20a%20frame%20%28C%2B%2B%29
关键代码如下
tf::Transform transform;
static tf::TransformBroadcaster br;
transform.setOrigin (tf::Vector3(tx, ty, tz));
transform.setRotation (tf::createQuaternionFromRPY (-1 * thetax, -1 * thetay, -1 * thetaz));// X Y Z
br.sendTransform (tf::StampedTransform(transform, ros::Time::now (),"/camera_link", "/world"));
ros::Duration(0, 5000000).sleep ();我这里是显示world坐标系相对于相机的位姿,sendTransform中前一个是父坐标系。
====================201804=========================
http://wiki.ros.org/agni_tf_tools
===============================
https://github.com/PickNikRobotics/rviz_visual_tools
http://docs.ros.org/melodic/api/moveit_tutorials/html/doc/move_group_interface/move_group_interface_tutorial.html
https://github.com/ros-planning/moveit_tutorials/blob/kinetic-devel/doc/move_group_interface/src/move_group_interface_tutorial.cpp