图像分割你不得不看的东西【持续更新】
图像分割你不得不看的东西【持续更新】
- 关于这节的英文单词
- 图像分割的定义
- 固有二值图像
- 失败情况
- 大津算法(Otsu's Algorithm)
- 自适应阈值分割
- 滞后阈值法Hysteresis Thresholding
- 基于彩色的图像分割
- Mahalanobis距离
关于这节的英文单词
Threshold 阈值
proximity 近似性
conveniently estimated (“learned”) 便捷近似
radius 半径
ellipsoid 椭圆体
semi-axes 半轴
inversely proportional 反比例贡献
diaginal 对角化的
orthonormal 标准正交
respectively 分别的
generic linear transformation 通用的线性变换
图像分割的定义
表示为P(x,y)一个向量值函数,编码一组图像属性(如强度、颜色、纹理、对比度等),
分割的目标是根据P将图像分割成不相交的均匀区域。
•通常情况下,一个好的分割应该保持空间的接近性(即两个相邻的像素必须属于同一个区域,除非它们显示出显著不同的P值),并提供相对大的区域,具有少量的空洞和良好的本地化,平滑的边界。
•在许多计算机视觉任务中,分割带来了场景上的关键语义知识,因为它将图像分割成语义有意义的部分(例如前景/背景,单个对象,移动/静态像素…),然后进一步的分析可以集中在这些部分上。
•在大多数与工业视觉分割相关的实际应用中,仅依赖于单一的图像属性,如强度(P(x,y)=I(x,y))或颜色(P(x,y))=[Ir(x,y) Ig(x,y) Ib(x,y)]T)。
固有二值图像
- 在各种应用中,感兴趣的对象(前景)比场景(背景)中不相关的区域(背景)暗/亮。
在许多工业应用中这是通过背光,即对象放置在光源和相机,投到上形象很阴影代表对象抯形状。 - 这种情况下,图像分析的第一步通常包含在图像二值化,即分割的图像像素分成两个不相交的区域对应于前景(黑/明亮的强度)和背景(亮/暗强度)
- 要分析的应用程序调用一个对象/图像,二值化将所有必需的分割信息。旵onversely,前台区域必须进一步分为分区单元对应单个对象,通常通过一个连续的图像分析步骤称为图像标签(也连接组件标签)由于像素属于不同的对象给予不同的标签。
- 固有的二值图像表现出明显的双峰灰度直方图,有两个完全分离的峰对应于前景和背景像素。因此,二值化可以通过阈值运算符部署适当选择的阈值T来直接实现:
失败情况
当直方图不是明显的双模态时,例如由于光照在整个场景中显著变化(下面的例子),强度阈值化的二值化不能提供正确的分割。
当两种模式之间的重叠是由于噪声,图像平滑可能有助于提高二值化。
显然,噪声图像的二值化是失败的。然而,用高斯滤波器平滑可以明显地改善直方图,并允许更正确的二值化
在许多实际应用中照明条件(根本性原因litghting conditions)
的稳定性是无法保证的。这样的应用程序授权一个健壮的,虽然计算更高的,方法,在分析的每一个图像中,一个算法在每个图像中自动计算一个合适的二值阈值
简单的启发式方法如下:在两个类之间,只要像素相等,就可以工作。
同样地,可以选择正确估计的百分位数(例如,如果我们知道黑暗/明亮的物体,如果我们知道图像的20%,那么20或80的百分位数)。

需要找到两个主要的峰,这通常意味着在寻找峰之前要平滑直方图,以避免搜索陷入伪局部最大值。
大津算法(Otsu’s Algorithm)
Otsu提出了一种有原则、有效的自动阈值选择算法。关键的直觉是把图像分割成两个最大的齐次区域。
因此,选择最优阈值,以使在灰度范围内产生的区域的所谓群内方差最小化,这是一种衡量在给定灰度水平上二值化后区域强度的指标。




至此我们总结出了关于求解最大类间方差的方法
自适应阈值分割
- 任何全局阈值方法都依赖于场景中均匀照明的假设。如果这个假设被违反,例如由于阴影,一个空间变化的(即自适应)阈值应该被使用,如果一个人仍然希望将图像二值化。
- 通常在每个图像像素自适应方法计算一个特定的阈值(TT(x,y))基于居民小区内的强度(如如。5×5,7×7,9×9 .
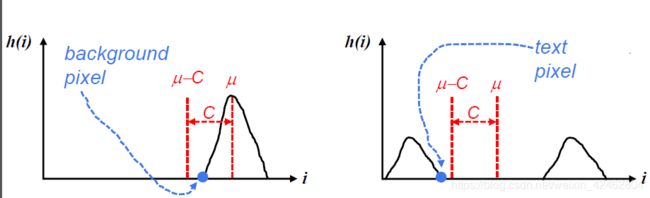
- 然而,太小的邻居可能缺少前景像素的背景,这将意味着分割错误,除非处理明确的问题
在文本图像中,缺少这两种像素的邻域问题可以通过部署与背景像素相关联的大多数这类邻域的特性来解决。因此,一个简单的技巧,以提高分割戏剧性在于减去一个适当的常数
滞后阈值法Hysteresis Thresholding
滞后阈值法
可以利用空间邻近度来分割灰度级的像素,i §属于不确定区间[i1,i2]。
有意地,我们假设一个不确定的像素如果接近另一个已知的属于该区域的像素,那么它更可能属于这两个区域中的任何一个。
基于彩色的图像分割
在一些应用程序中,所需要的对象表现出与背景结构完全不同的已知颜色。因此,基于颜色信息尝试从背景中分割前景是合理的。
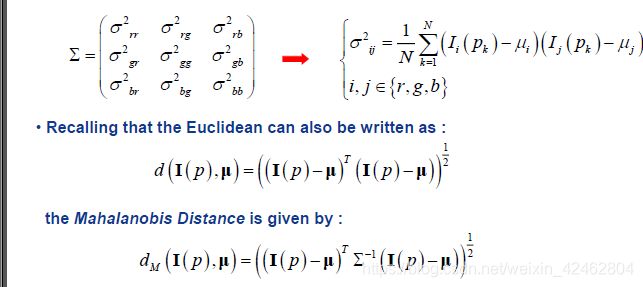
•然后,可以通过计算和阈值化每个像素的颜色与参考前景颜色m之间的距离(如欧几里德)来实现分割

因此,有必要知道参考颜色,m,可以很方便地估计(“学习”)从一个或更多的训练图像
。•例如,将前景像素的颜色建模为一个随机变量(即一个3D随机向量),在可用的培养样本(I(pk),k = 1 . N)上,
可以将参考颜色作为均值(预期值)。
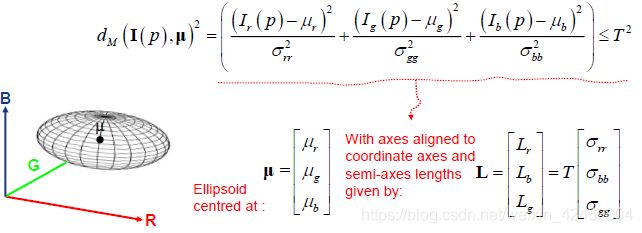
I估计参考颜色因此,分割包括将所有像素分类为前景所有像素,
在RGB彩色空间的三维范围内,以m为中心,半径为T。

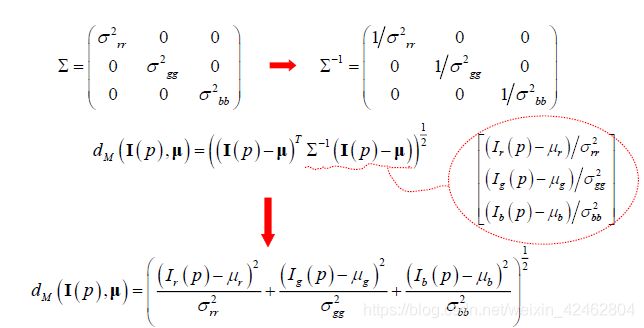
Mahalanobis距离